
Fターム[5J070AH34]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 位相検波 (373)
Fターム[5J070AH34]に分類される特許
81 - 100 / 373
無線センサ装置
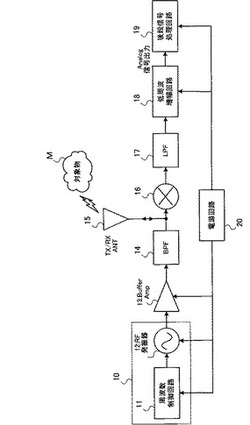
【課題】主に近距離にある対象物を測定対象とする場合に、他の無線通信システムに与える妨害と他の無線通信システムから受ける妨害の双方を低減できる無線センサ装置を提供すること。
【解決手段】この無線センサ装置は、送信周波数が所定周期で連続的に増加及び減少するように周波数拡散された高周波送信信号を生成してアンテナと15から放射すると共に、対象物からの反射波を受信して周波数拡散された高周波受信信号をアンテナ15出力する。ミキサ回路16に高周波送信信号と、それに対する高周波受信信号とを入力し、ミキサ回路16が双方の周波数が一致したところで位相検波器として動作してDCビート信号を出力するので、そのDCビート信号をローパスフィルタ17で抽出し、DCビート信号の変動から対象物Mの動きを検出する。
(もっと読む)
無線通信装置

【課題】確実にチャープレーダを検出することのできる無線通信装置を提供する。
【解決手段】無線通信装置は、無線信号を受信して受信信号を生成する受信部と、受信信号の位相を計算する位相計算器31と、計算された位相の時間変化から受信信号の周波数を検出すると共に、検出された周波数の時間変化を算出する周波数時間変化計算部32と、算出された周波数の時間変化から受信信号がチャープレーダ信号であるかどうかを判定するチャープレーダ判定部33とを備える。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置(11〜16)と、前記送受信装置の受信信号から二重偏波観測を行って偏波毎の受信電力を算出する信号処理装置(17)とを備える気象レーダシステムにおいて、データ変換装置(19)は、前記受信電力をもとに前記レーダ波のビーム幅及びパルス幅に基づく第1空間分解能でレーダ反射因子(Z)を算出し、前記受信電力の偏波間位相差(φDP)をもとに前記第1空間分解能より低い第2空間分解能で比偏波間位相差(KDP)を算出し、前記比偏波間位相差(KDP)を前記レーダ反射因子(Z)に基づいて前記第1空間分解能に変換し、前記変換手段で変換された比偏波間位相差(KDP)から前記第1空間分解能の降水強度(R(KDP)[mm/h])を算出する。
(もっと読む)
パルスレーダ装置
【課題】クラッタ、多次エコーの抑圧が可能で、合成帯域処理により相対速度を高精度・高速度分解能で計測し、高距離分解能の測距を行うパルスレーダ装置を得る。
【解決手段】周波数重複がなく周波数順に並べると隣接周波数差が所定周波数の整数倍になる任意のパターンの信号列を所定周期で出力する可変周波数発振器1、信号列と基準中間周波数信号から送信キャリア信号を生成、パルス化し送信信号を送信する送信手段2,3a,4、送信信号による目標等からの反射信号や前記信号列から受信ビデオ信号を生成かつ反射信号以外の周波数成分を遮断する機能含む受信手段3b,7〜13、受信ビデオ信号から目標の相対速度を得る相対速度計測器14、相対速度により受信ビデオ信号に相対速度補正し合成帯域処理を行う相対速度補正合成帯域処理器15、及びその出力の振幅値から合成帯域処理による目標の高分解能の測距結果を得る包絡線検波器16を含む。
(もっと読む)
近距離レーダ装置及び測距方法
【課題】簡易な構成でありながら、高分解能での距離測定等が可能な近距離レーダ装置を提供する。
【解決手段】2系統の送受信部10,20と、処理部30とを備えたものとする。一方の送受信部10は、送信波と受信波との差周波数を持つ第1中間周波信号V1を出力し、他方の送受信部20は、第1周波数と異なる第2周波数の送信波を送受信部10と同時に放射するとともに、送信波と受信波との差周波数を持つ第2中間周波信号V2を出力する。処理部30は、これらの中間周波信号V1,V2の比較結果に基づいてターゲット100までの距離Lを表すデータを出力する。
(もっと読む)
距離測定装置
【課題】複数の発受信手段の間で、時分割でかつバースト信号によって相互通信を行う場合に、相互間の距離を高精度で測定することができる距離測定装置を安価に実現する。
【解決手段】第1の発受信手段101から距離測定要求信号を時分割でかつバースト信号として発信し、これを受信した第2の発受信手段102において、前記距離測定要求信号に含まれる起点信号に同期しあるいは直交する距離測定信号を生成して時分割でかつバースト信号として発信し、これを受信した第1の発受信手段101において、前記起点信号をクロック信号とし、積和演算器を用いて前記距離測定信号の位相をリアルタイムで測定し、前記位相の測定結果から、第1の発受信手段101と第2の発受信手段102との間の距離を高精度で算出する。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 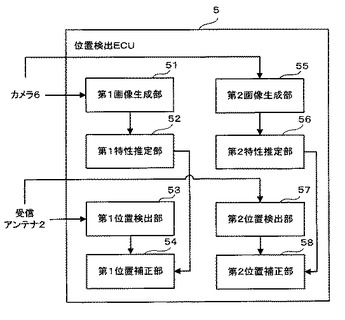 (もっと読む)
(もっと読む)
波形観測装置及び方法
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
(もっと読む)
測距方法及び装置
【課題】送信波の占有周波数帯域幅が電波法で規定する76MHz以内となる条件でも、最小探知距離と距離分離分解能を短くできるようにする。
【解決手段】掃引回路18から、24.05GHz〜24.25GHzの振り幅200MHzの掃引信号を出力し、スイッチ回路20ではこの掃引信号を切取り信号を用いて周波数分割して占有周波数帯域幅50MHzの4つの信号を形成し、これを送信信号として出力する。一方、受信側では、幅50MHzの送信信号で得られた4つの受信信号を入力した位相検波器23にて、送信信号と同期した周波数帯域幅200MHzの局部発振信号で検波することで、4つのビート信号を取得する。これらのビート信号は、合成するとそれぞれの波形が連続した状態となり、占有周波数帯域幅200MHzの送信信号を用いて得られるものと同等となり、近距離の測距が可能となる。
(もっと読む)
受信経路中の漏洩相殺のための集積回路、トランシーバおよびコンピュータ読取り可能記憶素子
無線周波数送信漏洩信号を相殺する集積回路は、無線周波数信号をアンテナポートに送信するための、増幅器段階を備える送信機部分と、送信機部分、アンテナポートおよび受信機部分に動作可能に結合する第1のカプラとを備える。受信機部分は、無線周波数信号と送信漏洩信号とからなる第1のコンポジット信号を受信するように構成される。受信機部分は、第1のコンポジット信号および局部発振信号を受信し、ダウンコンバートされたコンポジット信号を第1の中間周波数信号で出力する第1のダウンコンバージョン回路と、第1の中間周波数信号でダウンコンバートされた第1のコンポジット信号と局部発振信号の移相バージョンとを受信するように構成され、局部発振信号の移相バージョンは、ダウンコンバートされた第1のコンポジット信号からの送信漏洩信号の少なくとも一部を相殺する第2のカプラとからなる。 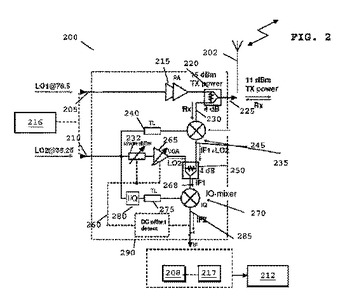 (もっと読む)
(もっと読む)
対象物の位置測定装置
【課題】簡素化・小型化しても高精度で距離を計測できる対象物の位置測定装置を提供する。
【解決手段】送信信号が反射器により反射され、直接波及び反射面で反射する反射波で伝搬し、合成波を離隔して設けられた2つの受信アンテナで受信し、2つの受信信号のうち大きな信号強度を有する受信信号を選択し利得制御部を介して出力する。位置演算回路300は、利得制御部の利得量に対する位相量が測定されてなる補正テーブルを用いて、受信信号から直交検波してなる直交ベースバンド信号に対して、利得量及び当該利得量に対応する位相量を補正し、これに基づいて距離を演算し、演算された距離及び選択された受信アンテナの情報に基づいて、2つの受信アンテナに対応して距離に対する合成波の受信位相を計算されてなる補正テーブルを用いて合成波の受信位相を得て補正された直交ベースバンド信号を再補正し、これに基づいて距離を再計算する。
(もっと読む)
多重チャンネル受信機システムと多重チャンネル受信機監視方法
多重チャンネル受信機システム(10)は、第1の複数の受信回路(12、14)と、アップコンバージョンミキサー(38)とを備え、各受信回路は、第2の複数の入力ラインの対応する1つに接続された第1の入力と、局部発振信号を提供するように構成された局部発振器(28)に接続された第2の入力と、第4の複数の出力信号の対応する1つを提供するように構成された出力とを有し、各入力ラインは、第3の複数の受信信号の対応する1つを提供するように構成され、アップコンバージョンミキサーは、基準信号(42)を受信する第1のミキサー入力(40)と、局部発振器に接続された第2のミキサー入力(44)と、第5の複数の方向性結合器(48、50)にアップコンバートされた基準信号を提供するミキサー出力(46)とを有し、第5の複数の方向性結合器の各方向性結合器は、第2の複数の入力ラインの対応する1つに接続される。 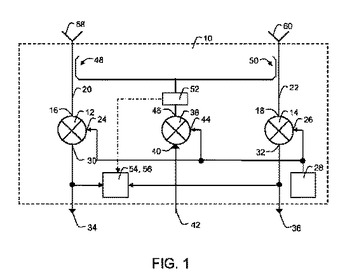 (もっと読む)
(もっと読む)
測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダ
【課題】装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置を得る。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
(もっと読む)
ミリ波イメージングシステムとその撮像方法
【課題】ミリ波透視スキャナの撮像幅が狭く、隠蔽された検知対象物の形状を特定することが困難である場合に、撮像領域を拡大して視認性を向上させることができるミリ波イメージングシステムを提供する。
【解決手段】本発明は、特定の形状の光学反射板20を被測定物16の表面に長手y方向がスキャナ2の移動x方向と直交する向きにして貼り付け、スキャナ2に光学検出器30を設け、被測定物表面の光学反射板を含む線分xiに沿ってスキャナを移動させることによりビーム強度スキャン測定と光学検出器による光学強度スキャン測定とを同時に行い、スキャナの走査移動距離dを算出すると共に、光学強度スキャン測定にて光学反射板の直交方向の幅wを求め、関数関係y=f(w)に基づき直交方向の幅wより長手方向の位置yを算出し、y位置のx方向のスキャン画像を得るミリ波イメージングシステムである。
(もっと読む)
受信装置及びその方法並びにレーダ装置及びその受信方法
【課題】受信系のダイナミックレンジの拡大等を図る。
【解決手段】送信系20から目標に向けて送信信号を放射する。目標で反射されて戻る反射信号は、受信手段401で受信される。受信手段401から第1の受信系402及び第2の受信系403に入力される。基準信号発生器30から送信信号のデットタイム時に基準信号が第1の受信系402及び第2の受信系403に入力される。第1の受信系402及び第2の受信系403の振幅位相検出器27,37から出力される受信信号の振幅及び位相を振幅位相補正/選択器38で補正して基準信号の振幅値に基づいて第1の受信系402及び第2の受信系403のうちの1つを選択して受信信号の補正された振幅及び位相をRCS算出器28へ供給する。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
レーダ装置
【課題】レーダの効率を向上することができ、しかも、車両の走行状態に対応して適切に前方等の検知が可能なレーダ装置を提供すること。
【解決手段】ステップ200では、車速センサ3からの信号に基づいて、車速の判定を行う。具体的には、車速Vが実質的に停車状態の速度V1未満(V<V1)か、又は、通常の走行状態を示す車速V2以上(V2≦V)か、或いは、低速走行を示す速度(V1≦V<V2)かを判定する。ステップ210では、停車状態であるので、レーダ送信電力が低出力領域Aに該当するか否かを判定する。ステップ220では、車両が低速走行状態であるので、レーダ送信電力が中出力領域Bに該当するか否かを判定する。ステップ230では、車両が通常走行状態であるので、レーダ送信電力が高出力領域Cに該当するか否かを判定する。
(もっと読む)
偏波レーダ装置
【課題】 従来の偏波のレーダは偏波を時分割で切替えて送受信するため、偏波信号処理に必要な偏波データが揃うのに時間を要し、数フレームに一回しか処理結果が得られなかった。このため終末誘導時の誘導信号の出力レートが低く、機体の誘導精度が低下するという課題があった。
【解決手段】 終末誘導時には送信偏波(V送信)を固定し、受信した片偏波(例えばVV、HV)のビデオ信号から特徴量を抽出する。抽出した特徴量と、初中期誘導時にメモリしたビデオデータベースから偏波信号処理に必要な他の片偏波(HH、VH)のビデオ信号を推定し、受信したビデオ信号(VV、HV)と推定したビデオ信号(HH、VH)で偏波信号処理を実施する。これにより1フレームのビデオ信号から偏波信号処理が実施可能になるため、従来と比べて2倍の更新レートが得られ機体の誘導精度が向上する。
(もっと読む)
レーダ装置
【課題】簡単な構成で、固有拡散符号で処理を行っている間および共通拡散符号で処理を行っている間に車間距離等を検出することができるレーダ装置の提供。
【解決手段】固有拡散符号で拡散する第1変調部と、共通拡散符号で拡散する第2変調部と、第1変調部で拡散された信号をレーダ波として第1の期間に送信し、第2変調部で拡散された信号をレーダ波として第2の期間に送信する送信部と、共通拡散符号で拡散された信号を干渉信号として共通拡散符号で逆拡散する第1復調部と、受信部で受信された信号から干渉信号を除去する干渉信号除去部と、干渉信号が除去された信号を固有拡散符号で逆拡散する第2復調部と、共通拡散符号で拡散された信号を当該共通拡散符号で逆拡散する第3復調部と、自車両から他車両までの距離を検出する距離検出部とを備える。
(もっと読む)
パルス圧縮装置
【課題】 従来のパルス圧縮装置では、未知のドップラ周波数に対して予め想定したドップラ周波数で位相補正を行っているため、正常にパルス圧縮されないという課題があった。
【解決手段】 未知のドップラ周波数を有する入力信号について送信パルスとの位相差を検出する位相差検出器1と、位相差検出器により検出された位相差の平均値からドップラ周波数を検出するドップラ検出器2によりドップラ周波数を検出し、検出したドップラ周波数により位相補正を行い、正常にパルス圧縮を行えるようにした。
(もっと読む)
81 - 100 / 373
[ Back to top ]