
Fターム[5J070BB20]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 旋回目標の追尾 (13)
Fターム[5J070BB20]に分類される特許
1 - 13 / 13
目標追尾処理装置及び目標追尾処理方法
【課題】 設定された航跡モデルを有効、かつ、適切に利用できるようにして、常に高精度で信頼性の高い航跡推定が行えるようにする。
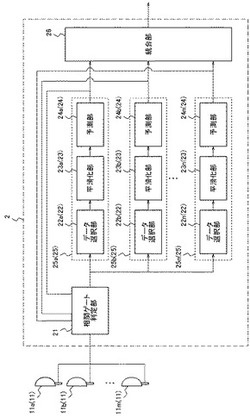
【解決手段】 目標を観測して得られる観測データと該目標に対して予測されたユニット予測航跡との相関を判定する相関ゲート判定部21と、互いに異なる航跡モデルを設定し推定ユニットを形成し、該航跡モデルに適した観測データを相関ゲート判定部21による判定結果に基づき選択して目標の航跡を推定しまた予測し、該予測結果をユニット予測航跡として出力する複数の推定ユニット25(25a〜25n)と、を備える。
(もっと読む)
追尾装置

【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
目標追尾装置
【課題】速度推定値の精度が悪い場合でも追尾継続が可能な目標追尾装置を得る。
【解決手段】ドップラ速度変化率が閾値を超えるか否かを判断し、ドップラ速度変化率が閾値を超えない場合には、直進目標用フィルタを選択し、ドップラ速度変化率が閾値を超える場合には、旋回目標用フィルタを選択するとともに、この時点におけるヘディングの値をヘディング基準値に設定し、その後、前記旋回目標用フィルタを選択した場合に、判定保留期間が経過するまで旋回目標用モデルを選択し、判定保留期間中に、現フレームのヘディングと前記ヘディング基準値の差異であるヘディング変化が閾値を超えるか否かを判断し、ヘディング変化が閾値を超える場合には、判定保留期間が経過した以降も旋回目標用モデルを選択し続け、ヘディング変化が閾値を超えない場合には、判定保留期間が経過した以降は直進目標用モデルを選択する追尾処理部20Aを設けた。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の機動の種類が等速旋回の場合には目標の針路は変化するが速さは一定であり、機動の種類が等速旋回直進加減速の場合には目標の速さは変化するが針路は一定であるが、従来の方法では、変化する諸元の追従の遅れの回復を早める一方、一定である諸元の誤差が大きくなることが課題であった。
【解決手段】目標の機動を検知時に目標諸元誤差予測値を大きめに調整する際に、機動の種類と目標の針路を考慮して、目標諸元誤差予測値を、変化している諸元の方向に大きめに、一定の方の諸元の方向に小さめに調整することにより、変化する諸元の追従の遅れの回復を早めながら、一定である諸元の誤差の増大を避けることを可能にする。
(もっと読む)
追尾方法及びその装置
【課題】 加速度運動を行う目標を精度よく追尾する追尾方法を得る。
【解決手段】 第1の時間の平滑誤差共分散行列から第2の時間の予測誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と第2の時間のゲイン行列と所定の観測雑音共分散行列とに基づいて第2の時間の平滑誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と観測雑音共分散行列から、第2の時間の予測値ベクトルに含まれる目標の位置についてのゲインである位置ゲインと第2の時間の予測値ベクトルに含まれる目標の速度についてのゲインである速度ゲインとを含む第2の時間のゲイン行列を算出し、第2の時間の観測値を取得し、取得した観測値と第2の時間の予測値ベクトルと第2の時間のゲイン行列とに基づいて第2の時間の平滑値ベクトルを算出する追尾方法において、速度ゲインとして固定値のゲインを含む第2の時間のゲイン行列を算出する。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
多目標追尾装置
【課題】許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得る。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
(もっと読む)
確率質量拡散によるモデルセットの適応
少なくとも1つのパラメータの一連の測定z,R;M;(t1,t2)を実行し且つ予測を再帰的に実行する方法。その方法は、少なくとも第1の測定インスタンス(M(tk);(k))に基づいて、少なくとも2つのモデル(C,S)に対する結果(x,P)を予測する工程と、次の測定インスタンス(M(tk+Tp)(k+Tp))の後、対応する時点に対するモデル(C,S)を更新し、これにより第1の測定インスタンスに基づいて行なわれる予測が次の測定インスタンスを考慮して更新される工程と、次の測定インスタンス(tk+Tp)(k+Tp)に対する少なくとも1つのモデル(C,S)を再配置し、これにより一方の更新モデルが他方の更新モデルに影響を及ぼす工程とを有する。少なくとも1つの補完(C)モデル及び少なくとも1つのサブ(S)モデルを含むモデルセットの場合、再配置の工程において、SモデルがCモデルに影響を及ぼすことはない。排他的な補完(L,N,R)モデルを含むモデルセットの場合、再配置の工程において、モデルセット(L,N,R)内のモデルの所定の対に対して、より高い確率(μ)を有するモデルはより低い確率を有するモデルに影響を及ぼすが、より低い確率(μ)を有するモデルがより高い確率を有するモデルに影響を及ぼすことはない。 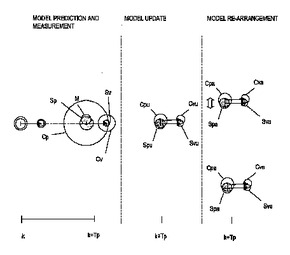 (もっと読む)
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
1 - 13 / 13
[ Back to top ]