
Fターム[5J070BF18]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 進路変更に関するもの(右左折又は追越) (17)
Fターム[5J070BF18]に分類される特許
1 - 17 / 17
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
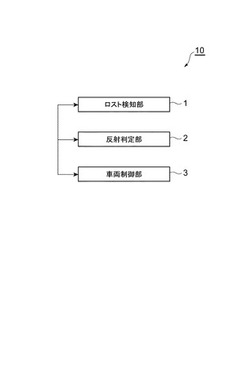
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
障害物検出装置

【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
物体位置検出装置
【課題】 自車両の後方に存在する物体が位置する車線を精度良く推定できる物体位置検出装置を提供すること。
【解決手段】 自車両の後方に存在する他車両等の後方物体が位置する車線を推定する物体位置検出装置1であって、バッファ更新処理部82によって自車両の過去の走行位置を記憶し、他車両絶対位置演算部83によって後方物体の位置を検出し、自車両の過去の走行位置と後方物体の後方物体の位置との相対位置関係に基づいて、他車両車線推定部85によって後方物体が位置する車線を推定する。よって、自車両が走行した車線に対する後方物体の位置が推定できる。このため、後方物体が位置する車線を精度良く推定することができる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】プリクラッシュ安全装置用のレーダと、車線変更支援装置用のレーダとを共用できるようにする。
【解決手段】送信部11のアンテナ36は、第1の方向で、かつ第1の距離近傍の第1の範囲と、第2の方向で、かつ第2の距離近傍の第2の範囲とを含む範囲に電波を照射することにより送信信号を送信し、受信部12は、送信信号としての電波のうち、反射されてくる電波を受信して、受信した電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号を、第1の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ衝突予備動作制御部14を制御して衝突に備える動作を実行させ、車線変更警告用信号処理部15は、受信信号を、第1より長い第2の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ車線変更警告動作制御部16を制御して、車線変更の危険を警告させる。本発明は、車両安全装置に適用することができる。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
制御対象判定装置
【課題】路側物体を車両制御対象としない。
【解決手段】制御対象判定装置1は、自車両の進行方向前方に存在する物体を検出するレーダ装置15と、ヨーレートセンサ11と、車速センサ13と、ヨーレートセンサ11および車速センサ13の出力に基づいて自車両の走行軌跡を推定する自車走行軌跡推定部31と、推定された走行軌跡上に検出された物体を自車両の制御対象と判定する制御対象決定部34と、ヨーレートセンサ11の出力に基づいて自車両が直進走行状態であるか否かを判定する自車挙動推定部33とを備え、制御対象決定部34は、自車挙動推定部33により自車両が直進走行状態であると判定された場合には、自車走行軌跡推定部31により推定された走行軌跡に関わらず、レーダ装置15により自車両の正面に検知された物体を制御対象と判定する。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
左前方監視レーダ110は、車両の左前方に検知範囲を有し、右前方監視レーダ120は、車両の右前方に検知範囲を有する。左前方監視レーダ110の検知範囲の中心軸と車両中心軸とのなす第1の角度は、右前方監視レーダ120の検知範囲の中心軸と車両中心軸とのなす第2の角度よりも大きく設定されている。これは左側通行の道路環境用の設定である。PSC・ECU130は、監視部131と設定部132を有する。監視部131は、左前方監視レーダ110と右前方監視レーダ120から受ける検知信号に基づき車両前側部の物体を監視する。設定部132は、車両の仕向国の交通環境に応じて、左前方監視レーダ110と右前方監視レーダ120の検知範囲と車両中心軸との関係を切り換える。
(もっと読む)
車両の障害物検知装置
【課題】物標の位置をより正確に予測することができる障害物検知装置の提供。
【解決手段】自車両前方の物標を検知する障害物検知手段11と、検知物標の情報を受け、自車両の作動機器を制御する作動機器制御手段12とを備え、障害物検知手段11は、所定のサンプリング時間ごとに、物標のまでの距離と、物標との相対速度と、物標の方角とを含む物標データを抽出する物標データ抽出部111と、物標データに基づいて、次回のサンプリング時の物標位置を予測する物標位置予測部112と、検知物標の位置と予測物標の位置とを照合し、同一物標を識別する物標識別部113とを有し、物標データ抽出部111は、物標の横方向の速度成分を更に求め、物標位置予測部112は、相対速度とともに横方向の速度成分を使用して、物標の位置を予測する。
(もっと読む)
車両の走行安全装置
【課題】前方の十字路あるいはT字路で側方から車両(自車)の走行路に接近する出会い頭車両などの物体との接触を効果的に回避する車両用物体検知装置を提供する。
【解決手段】進行方向に存在する物体に反射させて得た反射点を2次元平面に投影して得た点群の配列に基づいて物体の輪郭を構成する線分と端点を抽出し(S14)、抽出された端点に基づいて物体の相対速度Vyなどの相対関係を算出し(S16)、算出された相対関係に基づいて物体と接触する可能性があると推定された場合、接触する前の所定時期(TTCt<TTCthr1)に物体との接触回避を支援する接触回避支援手段を作動させると共に(S24からS32)、認識された線分の個数が1個の場合、2個認識された場合に比し、所定時期を遅延させた時期(TTCt<TTCthr0)に接触回避支援手段を作動させる(S26,S34)。
(もっと読む)
周辺監視システム
【課題】合流区間において、より速やかに合流する他車を検出することのできる「周辺監視システム」を提供する。
【解決手段】周辺監視制御部8は、道路の合流地点への接近を監視し、接近が発生したならば、合流地点での自車100から見た道路の合流方向についての、他車追尾部7における他車の検出感度を増加し、交流地点通過後所定距離自車が走行したならば、他車追尾部7の他車の検出感度を標準の検出感度に復帰する。他車追尾部7は、右レーダ装置2と右カメラ4を用いて右方の他車の検出と追尾を行い、左レーダ装置3と左カメラ5を用いて左方の他車の検出と追尾を行う。
(もっと読む)
物体検出装置
【課題】受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い物体検出装置を提供する。
【解決手段】ACCシステム1は、ミリ波レーダ10と、ステレオカメラ11と、これらの検出状態を示す物体種別情報を求める先行車認識ECU20と、物体パラメータおよび物体種別情報に基づいてブレーキアクチュエータ40や電子制御式スロットルバルブ41などを制御する走行制御ECU30とを備える。ミリ波レーダ10が低閾値で検出した物体については、ステレオカメラ11でも検出された物か、過去にミリ波レーダ10が高閾値で検出した物体を先行車候補とする。これにより、受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
車載レーダ装置、車両制御システム
【課題】 路側通信装置などのインフラを用いることなく、右折車両,停止車両,前方車両等によって生じる死角の状況を把握するための情報を取得可能な車載レーダ装置、及びその車載レーダ装置を利用した車両制御システムを提供する。
【解決手段】 レーダ波の送受信により自車両前方の物体を検出し、検出された物体の中から監視の対象とすべき対象車両(自車両の前方を走行する前方車両や走行路上の停止車両)、及びその対象車両によって生じる死角に存在する死角物体を抽出する(S110〜S150)。通常モード(対象車両が前方車両)の場合、前前方車両(死角車両)が存在し且つ減速していれば、前前方車両減速フラグをオンに設定し、死角検知モード(対象車両が停止車両)である場合、死角物体が存在していれば、死角物体存在フラグをオンに設定し、これらフラグ情報を対象車両の情報と共にECUに送信する(S160〜S220)。
(もっと読む)
車両用制御対象判定装置
【課題】 隣車線から自車線に侵入して制御対象となる他車両を的確に判定できるようにする。
【解決手段】 レーダー装置14により検知された物体が自車の走行軌跡に接近する横方向相対速度を横方向相対速度検出手段M2で検出するとともに、前記物体が自車に接近する進行方向相対速度を進行方向相対速度検出手段M3で検出し、物体を制御対象と判定するための確定度を算出する確定度算出条件を、確定度算出手段M4が横方向相対速度および進行方向相対速度に基づいて変更するので、隣車線の他車両が自車線に割り込もうとして横方向相対速度および進行方向相対速度が変化したときに確定度を変化させることで、制御対象判定手段M5が前記他車両を制御対象の候補として認識し易くし、自車線に割り込もうとする他車両を制御対象として判定する精度を高めることができる。
(もっと読む)
自動車のレーダーシステム
隣接車線(10,14;50)上の交通を監視するための50mよりも短い到達距離を有する少なくとも1つのレーダーセンサ(22,24)を有する,自動車(16)のためのレーダーシステムは,レーダーセンサ(22,24)が,位相制御されるアンテナ(36)と,異なる幾何学配置を有する複数のレーダーローブ(26,28;30,32;26’,28;44;46,48)を調節するための制御装置(40,42)とを有することを特徴としている。 (もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 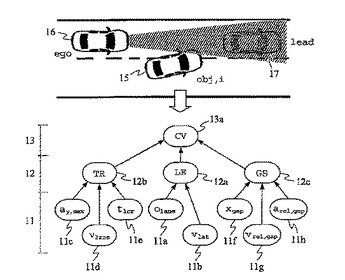 (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]