
Fターム[5J083AA04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 方式 (1,325) | アクティブ (1,085) | 透過 (156)
Fターム[5J083AA04]に分類される特許
1 - 20 / 156
情報提供システム、音響信号出力装置、コンピュータ用プログラム、携帯機器用プログラム、データ伝送方法及び情報取得方法
【課題】 屋内や地下空間をも運用環境とすることができ、携帯機器の使用者の歩行による移動にも対応可能であり、運用環境の景観も害することなく、携帯機器へ位置情報等を提供する。
【解決手段】 情報提供システムは、可聴周波数の上限域を利用する音響信号を出力する機能を有し、各々の音響信号が届く範囲が異なるように互いに離れて設置された、複数の音響信号出力装置と、各々の音響信号出力装置に対し、伝送すべきデータを指定するための、少なくとも一つの管理サーバーとを含む。各々の音響信号出力装置は、可聴周波数の上限域を利用する周波数域に含まれる所定数の周波数から、管理サーバーにより指定されたデータに対応する一つ又は複数の周波数を選択し、選択された周波数の正弦波を音響信号として出力する。携帯機器は、可聴周波数の上限域を利用する音響信号を受信する機能を有し、受信した音響信号の周波数を検出し、検出された一つ又は複数の周波数により表されるデータに基づいて、情報を求める。
(もっと読む)
キーレスシステム

【課題】多数の車内アンテナや車外アンテナを必要とせず、より低コストにより近傍領域判定および車内外領域判定を実施することが可能なキーレスシステムを提供する。
【解決手段】車載機は電波を放射する第1のアンテナと、音波を放射するスピーカと、車とユーザの距離を算出する制御部とを備え、携帯機は第1のアンテナにより放射された電波を受信する第2のアンテナと、スピーカにより放射された音波を受信するマイクとを備え、車載機の制御部は第2のアンテナが第1のアンテナにより放射された電波を受信した電波受信時間およびマイクがスピーカにより放射された音波を受信した音波受信時間とに基づき車とユーザの距離を算出し、算出した車とユーザの距離に基づき携帯機が車内領域、車外近傍領域または車から離れた領域のいずれにあるかを判定するように構成したので、必要な部品数を減らすことが可能となる。
(もっと読む)
水圏生物のモニタリング装置及び方法
【課題】水圏生物の複数の個体を,長期間にわたり,安定して,高い信頼性で追跡できるようにする。
【解決手段】モニタリング装置100は,水密構造の筐体120と,筐体120内に設けられ,第1及び第2の水中マイクから出力される第1及び第2の信号をそれぞれ第1及び第2のチャンネルに録音する録音のための電子回路144とを含む。電子回路144は,第1及び第2の信号の周波数帯域を,いずれも所定周波数だけ低域側にシフトさせ,周波数がシフトされた第1及び第2の信号をデジタル化し,それぞれ第1及び第2のチャンネルの信号としてハードディスク等に記録する。
(もっと読む)
可視化装置
【課題】出入り口が狭くなっている空間の中の物理量の変化の様子を漏れなく可視化できるようにする。
【解決手段】可視化装置5の保持部材6は、常温よりも高い温度を変態温度とする形状記憶部材を空間ASに収まる形状に加工したものにより構成されている。保持部材6の一面には、複数個の音/光変換器10(k)がマトリクス状に配置されている。音/光変換器10(k)は、ストローブ信号SSと同期して音の音圧をサンプリングし、サンプリングしたデータDS−iを記憶部180に記憶させる。また、音/光変換器10(k)は、この記憶部180内のデータDS−iに従って発光部130を発光させる。
(もっと読む)
位置計測装置及びその方法
【課題】環境ノイズが大きなレベルの調査環境下であっても、遮蔽物内の被計測対象の特定位置を前記遮蔽物外から探査する装置を提供する。
【解決手段】遮蔽物内の被計測対象100の特定位置を遮蔽物外から計測する場合に、被計測対象100の特定位置に電磁波及び音響波を定期的に同時に発信する発信装置200を装着し、遮蔽物外に配置される探査装置300にて、発信装置200からの電磁波を受信すると共に互い異なる複数の位置で音響波を受信してそれぞれの受信結果から被計測対象100の特定位置を探査する。探査装置300は、電磁波が受信されてから複数の位置でそれぞれ音響波が受信されるまでの時間を計測し、時間計測結果から電磁波と音響波との速度差に基づいて複数の音響波受信位置における発信装置200との相対距離を求め、複数の音響波受信位置における発信装置200との相対距離に基づいて発信装置200の相対位置を特定する。
(もっと読む)
ポインティングシステム
【課題】音波発信装置または音波受信装置のいずれか一方が単数であっても、ポインティングデバイスの指し示す方向を推定し、指示点の表示を行なう。
【解決手段】変調音波を発信する単一のスピーカ20aと、ポインティングデバイス10に設けられた複数のマイク10a〜10cと、ポインティングデバイス10の傾きを検出するジャイロセンサ10dと、スピーカ20aからマイク10a〜10cが受信した変調音波に相関処理を施して、マイク10a〜10cとスピーカ20aからの距離または距離差を算出し、距離または距離差に基づいて、マイク10a〜10cの空間上の位置を推定し、ポインティングデバイスの方向ベクトルを推定し、方向ベクトルと平行な直線と平面としてのスクリーン20との交点A2を推定するPC30と、を備える。
(もっと読む)
位置測定システム
【課題】従来技術に比較して高精度で端末の位置を測定することができる位置測定システムを提供する。
【解決手段】位置測定システムは、マイクロホンアレイを備えた複数のノードが相互にネットワークで接続されかつ時刻同期されたマイクロホンアレイ・ネットワークシステムを用いて、各ノードの位置を推定する制御部を備える。各ノードは、マイクロホンアレイで受信した、1つのノードからのサウンド信号に基づいて、サウンド信号の到来方向の角度を推定する音源推定処理部と、サウンド信号の送信時刻と受信時刻との差分とサウンド信号の速度に基づいて、サウンド信号を送信したノードからの距離を推定する距離推定部と、推定された到来方向の角度及び距離を他のノードに対してデータ通信で送受信するデータ通信部とを備え、制御部は、推定された到来方向の角度及び距離に基づいて、各ノードの位置を推定して計算する。
(もっと読む)
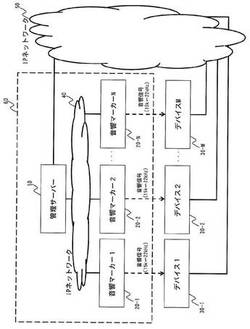
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】対象の所在確認および追跡を行う自律型超音波屋内追跡システムを用いて対象の所在確認ならびに位置決定を行なう方法を提供する。
【解決手段】自律型超音波屋内追跡システム(AUITS)200は、RF信号および超音波信号を送信するためのRF送信器205および超音波送信器206を含む移動するタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し対象の所在を確認する位置決定機能(POD)202とを備える。PODは複数のリーフモジュールから構成され、各リーフモジュールには位置信号の超音波受信器があり、タグ装置から送信された超音波位置信号を受信する。リーフモジュール間には既知の構造トポロジー関係があり、各超音波受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、位置計算ユニット210で対象の位置が計算される。
(もっと読む)
物体検出支援システム、制御方法、及びプログラム
【課題】送信器から発せられる検出波による物体の検出を支援すること。
【解決手段】設定部110と、送信レベル取得部120と、設定部110に保持されている送信器510及び受信器の各位置情報に基づいて、伝播損失を受信器から見た方位と距離の関数で表す伝播損失関数として算出する伝播損失関数推定部130と、設定部110に保持されている物体情報の物体について、外部のデータベース600から当該物体のターゲットストレングスを抽出するターゲットストレングス取得部140と、送信レベル取得部120が取得した送信レベル情報と、伝播損失関数推定部130が算出した伝播損失関数と、ターゲットストレングス取得部140が抽出したターゲットストレングスとに基づいて、信号レベルを受信器からの方位と距離の関数で表す検出信号レベル関数を求め、外部の表示手段700に表示させる検出信号レベル関数推定部150とを備える。
(もっと読む)
直接波抽出方法並びに探索側端末及び被探索側端末
【課題】機能等に制限のある端末間で、音波による位置関係推定を行うため直接波のみを抽出する。
【解決手段】位置推定開始確認(1)(2)後、探索側端末10は送信する音波パルスの回数及び間隔を予め設定して(3)、被探索側端末20に通知し(4)、被探索側は録音を開始する(5)。探索側は設定に従う音波パルスを送信する(7)と共に、各パルスの送信時刻を取得し(8)、送信終了を被探索側に伝える(10)。被探索側は録音を終了し(11)、録音に含まれる音波パルスの中から、予め通知されている所定の回数及び間隔に従うものを直接波を受信したパルスと判定して(12)、受信時刻を探索側に通知する(13)。探索側は受信時刻と送信時刻とから、位置関係の推定を行う(14)。
(もっと読む)
パルス抽出負荷低減方法及び探索側端末並びに被探索側端末
【課題】機能等に制限のある端末間で、音波による位置関係推定を行うに際しての相関処理の負荷を低減する。
【解決手段】位置推定開始確認(1)(2)後、探索側端末10は送信する音波パルスを予め設定して(3)、被探索側端末20に通知し(4)、被探索側は録音を開始する(5)。探索側は設定に従う音波パルスを送信する(7)と共に、各パルスの送信時刻を取得し(8)、送信終了を被探索側に伝える(10)。被探索側は録音を終了し(11)、録音に中から、負荷処理を低減した相関処理で受信時刻を求め(12)、受信時刻を探索側に通知する(13)。探索側は受信時刻と送信時刻とから、位置関係の推定を行う(14)。相関処理はウィンドウサイズ、データビット数及びサンプリング間隔を粗く取って1回目に暫定位置を求めてから、2回目に暫定位置周囲でパラメータを細かく取って確定する。
(もっと読む)
位置算出装置、位置算出方法および位置算出プログラム
【課題】手の位置の誤検出を防止すること。
【解決手段】位置算出システムは、超音波発信機10、超音波受信機20a〜20c、位置算出装置100を有する。位置算出装置100は、超音波受信機20a〜20cから超音波の受信時間を取得し、超音波発信機10から音波が発信された時間から超音波受信機20a〜20cに超音波が到達するまでの到達時間を超音波受信機毎に特定する。位置算出装置100は、特定した複数の到達時間と、利用者1の人体の特徴から導かれる音波の到達時間とを基にして、到達時間を利用して超音波発信機10の位置を算出するか否かを判定する。位置算出装置100は、判定結果に基づいて、超音波発信機10の位置を利用者の手の位置として算出する。
(もっと読む)
水中位置探知システム、水中位置探知システムに用いられる超音波発信手段および船側受信手段、ならびに水中位置探知方法
【課題】母船から見たダイバーの3次元的な位置を正確に把握することを可能とする水中位置探知手段を提供する。
【解決手段】水中位置探知システム11は、ダイバーA側に取り付けられる超音波発信装置12から発信される超音波20を、船S側に設けられる船側受信装置13によって受信し、水中におけるダイバーAの位置を探知するためのシステムである。ここで、船側受信装置13は、複数の超音波マイクロフォン18を有する超音波受信装置21と、発信同期信号22Sと超音波信号との間の時間差τを出力する比較装置23と、比較装置23によって出力された時間差τに基づいて、ダイバーAと超音波マイクロフォン18との間の距離Lを計算する距離演算装置24と、距離Lに基づいてダイバーAの3次元座標を計算する座標演算装置25と、ダイバーAの座標を画像に表示する画像表示装置26とを有する。
(もっと読む)
面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法及び情報管理方法
【課題】ボイラ火炉等の面で囲まれる容器の内部の検査に用い、基準点を決定することが容易であり、しかも特定する検査位置が大型の容器内であっても簡単に位置を特定することができ、検査と検査位置特定を同時に行うことができる面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法を提供する。
【解決手段】面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法であって、前記内壁面上の位置座標既知の箇所に音波を異なる2箇所以上から発信可能な発信器を配置し、作業者が携帯可能であって、前記音波を受信可能な受波器及び前記検査が可能な検査具が一体となった一体物を、前記検査作業を行う位置に配置し、前記検査具を用いて前記検査作業結果を得るとともに、前記発信器の2箇所以上より音波を発信し、前記2箇所以上から発信された音波それぞれが、前記受波器に到達する時間を計測し、前記到達時間と、前記2箇所以上の音波の発信箇所の位置座標を用いて、前記受波器の位置座標を特定する。
(もっと読む)
面で囲まれる容器
【課題】ボイラ火炉等の面で囲まれる容器の内部の検査に用いための基準点を決定することが容易な面で囲まれる容器を提供する。
【解決手段】面で囲まれる容器であって、前記容器の内側面の位置座標既知の単数又は複数個所に、内壁面からの突起物であるマーカーが設けられている。また、前記マーカーは、該マーカーが設けられている位置の位置情報を有するバーコード又は刻印が刻設されているか、該マーカーが設けられている位置の位置情報を有するICタグを取り付け可能な取付部が設けられている。
(もっと読む)
行動認識装置、行動認識方法および行動認識プログラム
【課題】人物の行動を正確に認識すること。
【解決手段】行動認識装置100は、超音波発信機10、超音波受信機20a〜20cに接続される。行動認識装置100は、超音波発信機10からモノIDと検知時間を取得する。また、行動認識装置100は、超音波発信機10から超音波受信機20a〜20cまでの距離の情報を取得する。そして、行動認識装置100は、利用者1の身体周辺を複数の領域に分割し、利用者の手の位置が含まれる領域の推移のパターンと、利用者が利用する物体の種別から、利用者の行動を認識する。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
地主土地境界表示音波発振装置および三角測量基準点受信位置測定装置を備えた、農地調整利用方法。
【課題】狭い個人所有の農地を一つに集めて、広大な調整農地として形成して、効率の高い農業に寄与する、農業協力技術を提供する。
【解決手段】個人持分農地A1の境界に、耐腐食性金属で形成された境界点クイa2、境界点クイb3、境界点クイc4、境界点クイd5を埋設する。順次、個人持分農地B〜個人持分農地Zと境界点を埋設して、個人持分農地を集合させた一つの広大調整農地6を形成する。広大調整農地6に基礎三角点クイX7、基礎三角点クイY8、基礎三角点クイZ9を、クイ頭部を地中より出した状態にて埋設する。このように一つの広大調整農地6として、表面上は使用されるが、個人持分農地A1を視認するため、埋設された境界点クイの正確な位置に小形金属探知器付音波発振器を差し込んで固定し、さらに基礎三角点クイの頭頂部に、着脱式音波受信位置測定器を設け、ノートパソコンを接続する。
(もっと読む)
ドリルヘッド位置推定システム、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法
【課題】電磁波の減衰の影響を受けずに、また電磁波を探索する作業を伴わずに、地中のドリルヘッドの三次元位置を推定する、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法を提供する。
【解決手段】HDD工法における地中のドリルヘッドの位置を推定するために、従来技術の電磁波の代わりにドリルヘッド先端から音を発生させ、地表に複数設けたセンサユニットで受信する。センサユニットに到達する音の時間差とセンサユニット同士の距離に基づいて演算し、ドリルヘッドの位置を推定する。また、ドリルヘッドの進行方向の反対側のセンサユニットから得られるデータは、音がドリルヘッドを回転駆動する駆動パイプを伝うために誤差が大きくなってしまう。そこで、無効になったセンサユニットを、備え付けられているLEDを発光制御させることにより、有効なセンサユニットと無効なセンサユニットとの、目視での判別を容易にすると共に、おおよそのドリルヘッドの位置が把握可能になる。
(もっと読む)
1 - 20 / 156
[ Back to top ]