
Fターム[5J083AB03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 魚群探知 (137) | 魚種判別 (17)
Fターム[5J083AB03]の下位に属するFターム
底付き魚判別 (1)
Fターム[5J083AB03]に分類される特許
1 - 16 / 16
アラーム発生装置、超音波探知装置、アラーム発生方法、超音波探知方法、アラーム発生プログラム、超音波探知プログラム
【課題】ユーザの所望とする魚種が検出されたときにのみ、正確且つ適切に、ユーザへ通知を行う。
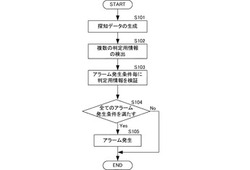
【解決手段】超音波パルス信号のエコー信号から探知データを生成する(S101)。探知データに基づいて魚群(単体魚)エコーの検出、深度、底質等の魚種によって特徴が異なる判定用情報を検出する(S102)。魚種に応じて予め設定された複数のアラーム発生条件毎に、判定用情報を検証する(S103)。複数のアラーム発生条件のうち一つでも判定用情報によって満たされていなければ、アラームは発生しない(S104:No)。一方、全てのアラーム発生条件が判定用情報によって満たされていれば(S104:Yes)、アラームを発生して放音する(S105)。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム

【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
水中探知装置、水中探知方法及びプログラム
【課題】所定レベル以上のエコー信号を取得できない場合でも、信頼性のある水深を取得することができる水中探知装置、水中探知方法及びプログラムを提供する。
【解決手段】送信された信号が水中で反射してなるエコー信号に基づいて、水深を検出する水中探知装置であって、自装置の位置を取得する。位置の水深を示す水深データを取得する。取得した位置及び取得した水深データに基づいて、検出すべき水深を推定する。エコー信号に基づく画像と、推定した水深とを表示する。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
物標探知装置及び物標探知方法
【課題】単体魚等の物標を高精度で検出する。
【解決手段】単体魚の検出を行う水中探知装置10は、受信信号に対し、所定期間毎にその期間内の最大値を抽出するマックスピークホールド部1611と、受信信号に対し、所定期間毎にその期間内の最小値を抽出するミニピークホールド部1612と、互いに異なるピークホールド位置で抽出された最小値と最大値との間の勾配を用いて単体魚を示す信号の立ち上がり及びその立ち下がりを判定する単体魚一次検出処理部162とを備えている。
(もっと読む)
超音波探知装置、魚群探知装置、超音波探知方法、および魚群探知方法
【課題】より正確な魚種判別情報を提供する魚群探知装置を実現する。
【解決手段】魚群探知装置1の魚種判別情報算出部40には、受信部30から異なる2周波の受信信号Rxf1,Rxf2が入力される。ΔSV算出部41は、受信信号Rxf1を用いて体積散乱SV1を算出し、受信信号Rxf2を用いて体積散乱SV2を算出する。ΔSV算出部41は、体積散乱SV1、SV2の差分から体積散乱差ΔSVを算出する。ΔSVヒストグラム算出部42は、体積散乱差ΔSVから実測ヒストグラムHisΔSVを算出する。類似度算出部43は、実測ヒストグラムHisΔSVと魚種X毎のリファレンスヒストグラムRefHisΔSVxとを相関処理して、魚種X毎の尤度Lxを算出し、一つの実測ヒストグラムHisΔSVに対する複数魚種の尤度Lx群を類似度データとして、出力する。
(もっと読む)
水中探知装置及び魚種判別方法
【課題】本発明は、水中を遊泳する魚の魚種を判定する水中探知装置及び魚種判別方法を提供することを目的とする。
【解決手段】単体魚からの反射信号の包絡線は、最も反射強度の強い浮き袋からの反射波と、それ以外の部位からの反射波に大別される。本発明は、浮き袋以外から反射波が魚種により異なることに着目し、探知対象物の反射信号から検出された包絡線の、振幅値の最も高いピークと、当該ピークの前又は後に存在するピークの情報に基づいて、探知対象物の魚種を判別するものである。
(もっと読む)
スキャニングソナー装置および追尾方法
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
水中探知装置
【課題】正確に魚体長検出や魚種判別を行うことができる水中探知装置を提供することを目的とする。
【解決手段】超音波信号を送信する送信部3と、送信信号に対する物標からの反射波を受信する受信部4と、前記受信部で受信した受信信号から、単体魚からの反射信号を抽出する抽出部6と、前記単体魚からの反射信号のうち、所定の信号レベル以上で連続する反射信号の波形情報を取得し、該波形情報に基づいて、魚に関する情報を生成する情報生成部7とを備える。これにより、単体魚からの反射信号の時間的変化、つまり反射信号の波形の情報から、魚体長情報や魚種情報などの魚に関する情報を生成することができる。
(もっと読む)
水中探知装置
【課題】ユーザーの経験に因ることなく底質及び魚種ひいては水中の様子を直感的に判断することのできる水中探知装置を提供することを目的とする。つまり探知結果を写実的に表した水中探知装置を提供することを目的とする。
【解決手段】前記課題を解決するために本発明における超音波の送受信により水中を探知する水中探知装置は、超音波信号を水中に送信する送信手段と、前記送信された超音波信号のエコー信号を受信する受信手段と、前記エコー信号に基づいて水底を検出する水底検出手段と、前記エコー信号に基づいて前記水底の底質が予め定めた複数種類の底質のうち何れの底質に属するかの確率分布を算出する底質判別手段と、前記確率分布に基づいて、底質を表すテクスチャーを前記水底より下方に表示する底質表示手段とを備えることを特徴とする。
(もっと読む)
クジラ目生物探知機
【課題】クジラやイルカなどのクジラ目生物の存在の有無および方角を探知し、その生物の種類を特定して種類名称を表示する、クジラ目生物探知機を提供する。
【解決手段】クジラ目生物の発する超音波の波形情報を生物の種類毎のデータベースとして持ち、超音波マイクを設け、受信した超音波の波形情報を前記データベースと照合し、その照合での合致の有無によりクジラ目生物の存在の有無を探知する。超音波マイクとして指向性があるものを採用し、超音波の発信源であるクジラ目生物の存在する方角を特定する。前記データベースにクジラ目生物の種類名称の項目を持たせ、照合結果として、合致した生物の種類名称をも出力する。
(もっと読む)
クラゲ検出装置
【課題】超音波の反射波信号のみからクラゲを判定しているので、正確に判定できないという課題があった。
【解決手段】超音波振動子22で受信された複数の周波数の反射波信号は受信機能23、データ変換機能24及びアンテナ7,8,10を通じてパーソナルコンピュータ11の第1のメモリ機能25で記憶され、第1のメモリ機能25から1ライン毎に読み出され、レベル判定機能26に入力され、予め設定された周波数毎のレベルの範囲の反射波信号のみが出力されて第2のメモリ機能27で記憶され、第2のメモリ機能27から読み出された観測結果に基づいてドット判定機能28に入力され、1ライン毎の隣り合った信号及び隣り合ったラインの隣り合った信号を順次周波数毎に比較して、同じレベルの反射波信号がどのような形状をしているか、どの様に広がっているかを現地でのクラゲ等の周波数毎の反射波信号の観測結果に基づいてクラゲか他の物体かを判定する。
(もっと読む)
水中探知装置
【課題】
エコー反射物の速度情報を加味した探知情報を表示画面上に表示することができる水中探知装置を提供することを目的とする。
【解決手段】
水中に超音波を送信して対象物からの反射エコーを受信して表示する水中探知装置において、通過帯域周波数の一部に阻止帯域を有するバンドパスフィルタを用いて受波信号のフィルタリングを行うフィルタ処理部を備え、前記阻止帯域を、移動速度がゼロの物標で反射した信号の周波数帯域とする。これにより、海底やプランクトン層からの反射エコーを除去し、速度を有して移動する魚群等からの反射エコーのみを表示画面上に表示することができる。
(もっと読む)
魚の個体群と挙動を大陸棚の規模で連続的に監視
魚群の個体群面密度及び詳細な挙動、並びにそれらの相互作用が、海洋音響導波路リモートセンシングにより数千平方キロメートルに広がる大陸棚の規模の領域にわたって連続的に監視される。いくつかの実施形態において、音響導波路として振る舞うための、大陸棚、島等のような特定の地球物理的環境の能力を利用し、音は、従来のソナー手法で被った球面損失の代わりに、円筒形拡散損失のみを受ける捕捉モードを介して長距離にわたって伝搬する。 (もっと読む)
河川魚類計測方法およびその装置
【課題】より一層正確に遡上魚及び降下魚の有無、種類、数量を計測する。
【解決手段】河川にある魚道3の隔壁9を設けた複数の潜孔部11から魚を通過せしめ、水中に設けた超音波送受波器15により前記各潜孔部11を通過する魚類13に対して斜め方向に向けて水中からほぼ水平に指向特性を制御した超音波を送信すると共に魚類13に反射した反射波を受信し、この反射波により魚類13の有無と数量とを時系列に自動的に計測する。超音波が魚類13に対して斜め方向に向けて送受信されることで、ターゲットを大きく捉えることができ、反射波を大きくできる。さらに、各潜孔部11を通過する魚類13を水中から魚類撮像手段31で撮影する。記録した映像は、後日、人手により各超音波送受波器15によるデータと併せて通過時間、移動方向、魚数、魚種を確認、集計できる。
(もっと読む)
魚群探知機および魚群探知機用トランスデューサ
水中に超音波を出射してその反射波を捉えることにより魚群を探知する魚群探知機(10)を構成するにあたり、超音波の出射およびその反射波の受信を行う複数の圧電素子(21),(22)を含むトランスデューサ(20)と、各圧電素子(21),(22)により受信した反射波に基づき魚影を識別する処理を行う魚影識別処理手段(52)と、識別した魚影を表示装置(47)の画面上に表示する処理を行う魚影表示処理手段(53)とを設け、複数の圧電素子(21),(22)を、それぞれ異なる方向に指向性の中心線を向けて配置するとともに、少なくとも一つの鉛直面について、同一鉛直面内で水面に対して平行または略平行な方向を含む複数の方向に指向性の中心線を向け、かつ、探知範囲に隙間が形成されない状態で配置した。 (もっと読む)
1 - 16 / 16
[ Back to top ]