
Fターム[5J083AG09]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | ソーナーと方探 (117) | ソーナーとGPS (72)
Fターム[5J083AG09]に分類される特許
41 - 60 / 72
音響映像生成装置、及びプログラム

【課題】音響の反射波を利用して生成した映像を、その繋ぎ目が目立たないよう繋げて合成できる音響映像生成装置を提供する。
【解決手段】被写体に対して移動しつつ音波を繰り返し放射し、その反射波を受けて、反射波に基づく映像情報を逐次出力するソナーから、原映像を受け入れ、当該逐次的に入力される原映像から予め定めた部分領域を画定し、原映像に対して、ソナーと被写体との距離に基づき、投影面の幾何補正を行い、連続して得られた複数の幾何補正後の原映像を、それぞれの画定された部分領域内の映像部分に対応する部分が互いに重なり合うよう合成して合成音響映像を生成して出力する音響映像生成装置である。
(もっと読む)
位置通知システム

【課題】GPSを用いた技術では正確な測位ができないような場所にいる場合であっても、その位置を特定する。
【解決手段】携帯電話機10−2は、位置通知のリクエスト信号を受信すると、収音を行なって(S6)、収音した音を表す音信号に重畳された領域IDを抽出する(S7)。そして、携帯電話機10−2は、GPS信号に基づいて所在地を測位して(S8)、これらを測位装置20に送信する(S9)。測位装置20は、受信した領域IDに対応付けて領域特定テーブルに記憶されている領域名称を特定し(S10)、所在地と領域名称とを地図上に示して表示出力させる(S11〜S13)。これにより、地図上にその所在地に対応するマーキングと共に、領域名称「○○デパート2階」のように、その所在地におけるさらに詳細な位置も表示される。
(もっと読む)
GPS魚群探知装置
【課題】 従来の魚群探知装置では、自船の周囲に何も表示されていないために、現在の探知エリアをプロッタ上で把握することはできないという問題があった。
【解決手段】表示地図作成部12からの表示地図データは画像用メモリ15で記憶され、超音波振動子16が接続された受信回路17にエコー検出器18が接続され、エコー検出部18に水深検出部19が接続され、水深検出部19は探知範囲直径計算部20に接続され、探知範囲直径計算部20に指向角データ出力部21が接続され、探知範囲直径計算部20の出力は表示円直径計算部22に接続され、表示円直径計算部22に地図縮尺データ出力部14からの地図縮尺データが入力され、表示円直径計算部22の出力は表示円作成部23に入力され、表示円作成部23の出力は画像メモリ15で記憶され、画像用メモリ15の出力は画像表示回路24に入力され、画像表示回路24の出力は画像表示装置25に入力される。
(もっと読む)
狙撃手検知装置
【課題】遠隔操縦及び自律走行を融合した半自律走行により移動可能な防衛用地上ロボットシステムにおける狙撃手検知装置において、狙撃音に基づいて狙撃手の位置を高精度に特定することができるようにする。
【解決手段】走行可能な無人車1と、無人車1に搭載された全方位カメラ2及び狙撃音センサ3と、制御手段4とを備え、制御手段4は、全方位カメラ2により撮像される画像を記録手段4hにより常時記録し所定の時間に亘って保持させ、狙撃音センサ3により狙撃音が検知されたときに狙撃音の発生位置を特定し、記録手段4hにより記録された画像であって狙撃音の発生の前後に亘る所定期間に記録された画像のうちから狙撃音の発生位置及び所定期間内における無人車1の走行距離とに応じて画像を選択して再生する。
(もっと読む)
回転翼航空機搭載装置及びオペレーション調整方法並びにコンピュータプログラム
【課題】複数の回転翼航空機が曳航式のソーナー装置を用いて機雷を捜索するときに、これらの回転翼航空機により曳航される各ソーナー装置の間で音波の干渉が発生することを回避する。
【解決手段】機体システム10が、ソーナー装置を曳航する回転翼航空機に設けられた航法機器11、飛行制御用の飛行制御装置12、無線送受信するデータリンク部13、及びソーナー装置からの反射信号に基づき画像化処理を行う情報処理表示装置14を備え、情報処理表示装置14が、自機及び他機の捜索領域の各座標情報を記憶するデータベース17と、自機の位置及び速度、他機の位置及び速度、各座標情報に基づき、ソーナー装置間の所定時間後の相対距離を計算し、相対距離が音波の干渉を引き起こす距離の閾値以内であるかどうかを予測し、相対距離が閾値以内である場合、飛行制御装置12に対して所定時間のホバリングを指令する干渉判定処理部18とを備える。
(もっと読む)
潮流測定装置
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】加減速検出手段45は、航法装置3から出力された絶対船速又は対水船速計測回路42から出力された対水船速に基づいて、船舶1が加速状態又は減速状態にあることを検出し、検出結果を加算器50に出力する。回頭状態検出手段46は、ジャイロコンパス2から出力された船首方位に基づいて、船舶1が回頭状態にあることを検出し、検出結果を加算器50に出力する。演算停止手段49の加算器50は、検出結果が入力されたときに、スイッチ51における潮流演算回路43と潮流値出力回路44との接続状態をオン状態からオフ状態に切り替えるように該スイッチ51を制御する。
(もっと読む)
潮流測定装置
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】平均化時定数補正手段47は、対水船速に対する平均化処理の時定数と、絶対船速に対する平均化処理の時定数とが互いに異なる場合に、前記各時定数のうち少なくとも一方の時定数を補正するための所定の補正処理を行う。遅延補正手段48は、潮流演算回路43にて潮流を演算する際に、潮流演算回路43に対する対水船速の入力と、潮流演算回路43に対する絶対船速の入力との間で時間差がある場合に、前記時間差を補正する。
(もっと読む)
航路情報相互交換システム
【課題】本発明は、互いに接近しつつある船舶同士が、自船のこれまで記録してきた航路情報を交換しあうことにより、通過してきた各水域の状況を相手船に確実に通報できるようにして、その後の各船の安全運航に役立てうるようにした航路情報相互交換システムを提供することを課題とする。
【解決手段】洋上で互いに対向するように航行する2隻の船舶が、自船の航路に沿う暗礁の危険海域や漁場の危険海域などを通過する際に、風向風速や海流速度のデータと共に収集した航路情報を、時間の経過と共に順次記録し蓄積しておくための記憶手段2を備えており、各船舶が互いに擦れ違う際に、相手船の接近情報に基づき、相手船へ上記航路情報を自動的に発信しあうための通信制御手段7を備えることにより、各船舶のその後の安全航行に役立つことができる。
(もっと読む)
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法
【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
(もっと読む)
GPS内蔵高機能ブイ
【目的】
GPSから得られるブイの位置情報を有効利用し、海上における情報ネットワークを提供する。
【構成】
暗礁の場所や航路などを知らせる標識であり、また、海面水温や海上風速の検証に用いられる観測計であるブイにおいて、複数の所定の場所に配置されたフロート内に、無線中継装置とGPSと音波通信機と水中音波アンテナを備えることにより海中の情報を位置情報付きで提供する装置であって、該音波通信機が発する信号の反射波を該水中音波アンテナで受信することにより水中における物体や海底の情報を得ると共に、該無線中継装置により前記情報を地上局に伝送できることを特徴とするGPS内蔵高機能ブイ。
(もっと読む)
水上/水中航走体監視装置
【課題】機能評価を適切に行うことを可能にした航走体監視装置を提供する。
【解決手段】水中に配置され、航走体を監視する監視装置において、航走体が発するシグネチャを検出するためのセンサ部21と本監視装置の動作試験対象の航走体から少なくともその位置情報を含む航走諸元情報を受信する音響コマンド送受信部25と、前記送受信部25からの航走諸元情報に含まれた位置情報に基づいて、センサ部21の出力に基づいて監視データを生成する信号処理部22と、少なくとも船舶と監視装置本体との距離を求め、監視データと距離データとを記録部23に保存させる評価部26とを有する。
(もっと読む)
位置検出装置及び位置検出方法
【課題】位置情報衛星から送信される位置情報信号を遮る障害物が存在するか否かを判断
することができる位置検出装置を提供する。
【解決手段】位置情報衛星から発信される位置情報信号を受信して現在位置を演算する第
1の現在位置演算手段3と、移動距離及び移動方位を検出して現在位置を演算する第2の
現在位置演算手段4と、前記位置情報信号を遮る障害物の有無を検出する障害物を反射波
によって検出する障害物検出手段8,9と、前記障害物検出手段で前記障害物を検出して
いないときに前記第1の現在位置演算手段を選択し、前記障害物を検出しているときに前
記第2の現在位置演算手段を選択する選択手段とを備えている。
(もっと読む)
魚群探知機および魚群探知機の測定情報表示方法
【課題】過去の反響波情報と自船位置との対応付けが容易な魚群探知機を提供する。
【解決手段】測定情報指定手段26によって指定された時点の反響波情報が、反響波表示用ウインドウ28内の予め規定された基準ライン上に位置するように制御するとともに、測定情報指定手段26によって指定された前記反響波情報を測定した自船位置が、航跡表示用ウインドウ27に表示する航跡画像29において、航跡表示用ウインドウ27内の予め規定された原点に位置するように制御するようにした。
(もっと読む)
GPS内蔵高機能ブイ
【目的】
GPSから得られるブイの位置情報を有効利用し、海上における情報ネットワークを提供する。
【構成】
暗礁の場所や航路などを知らせる標識であり、また、海面水温や海上風速の検証に用いられる観測計であるブイにおいて、複数の所定の場所に配置されたフロート内に、無線中継装置と外部入力端子とGPSを備えることにより、海上あるいは海中の情報を提供する装置であって、該無線中継装置により遠洋における情報をも地上局に伝送できることを特徴とするGPS内蔵高機能ブイ。
(もっと読む)
ブイおよび魚群探知システム
【課題】魚群探知機を搭載した漁船や模型ボートで魚群を探し出すという手間がなくなり、効率的に漁を行うことができ、しかも漁船の出港前、出港中に関わらず最新の魚群情報を得ることができ、データベースにも最新の魚群情報を反映させることができるブイおよび魚群探知システムを提供すること。
【解決手段】ブイに魚群探知機とGPS受信機と無線機とを搭載する。ブイから魚群情報および位置情報を無線で情報収集センタに送信し、データベースとして保存する。船舶は、無線でデータベースにアクセスし、最新の魚群情報および位置情報を無線で取得し表示端末に表示させる。
(もっと読む)
魚群探知機
【課題】過去の反響波情報を確認し易い魚群探知機を提供する。
【解決手段】地図上に航跡を表示する航跡表示領域27と、反響波情報を表示画面10の幅方向に沿って時間順に表示する通常反響波表示領域28と、反響波情報を通常反響波表示領域28よりも長い時間範囲に亘って表示する縮小反響波表示領域29とを画像表示器9の表示画面10に同時に表示する特殊分割表示モードに制御可能とするとともに、特殊分割表示モードにおいては、縮小反響波表示領域29に、表示画面10の幅方向に沿って、一定時間間隔の時間目盛42と、該時間目盛42毎に特徴的な指標41とを表示し、さらに、航跡表示領域27の、前記時間目盛42の表示位置と略同時刻の自船位置に、当該時間目盛42と同じ指標40を表示するようにした。
(もっと読む)
軟弱水中地盤上の盛土の監視方法および装置
【課題】水中の軟弱地盤上に造成している盛土の安定性を容易に精度よく把握できるようにした軟弱水中地盤上の盛土の監視方法および装置を提供する。
【解決手段】軟弱水中地盤11上に造成している盛土10の頂部の沈下量Sを測定するとともに、盛土10の水中の法尻部に配置した検知指標体6をGPS受信機を備えた作業船2からナローマルチビーム測探機3により検知して盛土10の法尻部の水平方向変位量Hを測定し、測定した頂部の沈下量Sおよび法尻部の水平方向変位量Hに基づいて制御装置によって盛土10の安定性を判断するデータを演算して、予め入力してある基準データと対比する。
(もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 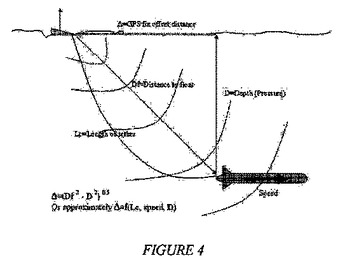 (もっと読む)
(もっと読む)
埋設物探査装置
【課題】地中電路工事などを行う場合、施工図による埋設物位置が違っても目的埋設物を事前に探査して、他の埋設物の破損や危険を防止することが出来る埋設物探査装置を提供する。
【解決手段】携帯送受信機(携帯電話)1、地表付近に設けられた無線中継器3、埋設識別シート6、光ケーブル6等の埋設物に取り付けられた無線ICタグ5からなる埋設物探査装置において、携帯送受信機(携帯電話)1から探査信号を電磁波として送信する。無線中継器3により中継された探査信号を無線ICタグ5が受信すると、無線ICタグ5は探査信号が自身に対するものである場合、識別情報を含む応答信号を電磁波として送信する。無線中継器3は識別情報を表示するとともに応答信号を中継する。携帯送受信機(携帯電話)1は応答信号を受信して解読することにより埋設物の名称などが容易に判別できる。
(もっと読む)
水底三次元画像作成システムおよび水底三次元画像作成方法
【課題】 緯度、経度の位置と水深の深度を同時に正確に測量する水底測量を行い、また、水底の地物をきめ細かく立体的に表現できる水底三次元画像を作成すること。
【解決手段】GPS電波受信装置8を有する位置検出装置2にて位置情報データを獲得し、水深検出装置3にて水面下の深度情報データを獲得し、位置情報データと深度情報データから位置深度データを作成すること、及び、該位置深度データに基づき、位置情報データを平面上にプロットしてポイントを表示し、該ポイントを結ぶ三角形を形成し、前記ポイントの有する深度情報データに基づいて該三角形内に創出ポイントを形成し、該ポイントと該創出ポイントの少なくとも何れか一方を頂点とする新規三角形を前記三角形に代えて形成し、該新規三角形に着色して水底三次元画像作を作成することとした。
(もっと読む)
41 - 60 / 72
[ Back to top ]