
Fターム[5J083AG09]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | ソーナーと方探 (117) | ソーナーとGPS (72)
Fターム[5J083AG09]に分類される特許
21 - 40 / 72
水中航走体の位置較正方法
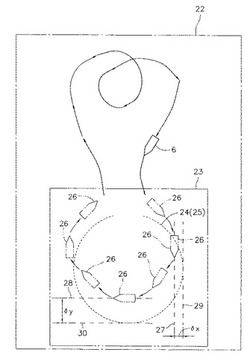
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
水中航走体の位置較正方法

【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
海底ケーブル移動距離測定システム、装置及び方法
【課題】海底ケーブルの敷設後の位置を測定し、海底ケーブルの移動距離を算出する海底ケーブル移動距離測定システム、装置及び方法を提供すること。
【解決手段】海底ケーブル移動距離測定システム1は、海底ケーブル位置DB32と、超音波発生装置160と、超音波伝達部161と、移動装置111と、移動装置111において左側超音波受信機121Lと、右側超音波受信機121Rとを備える。そして、海底ケーブル移動距離測定システム1において、海底ケーブル移動距離測定装置10は、左側超音波受信機121Lによって受信された超音波の音圧と、右側超音波受信機121Rによって受信された超音波の音圧とが等しくなるように移動装置111を制御し、制御されて移動した移動装置111の位置情報を、GPS衛星141との通信に基づいて取得し、取得した位置情報と、海底ケーブル位置DB32に記憶された位置情報との差を算出する。
(もっと読む)
海底熱水鉱床探測装置
【課題】海底におけるブラックスモーカーあるいはホワイトスモーカーの位置を測定する海底熱水鉱床探測装置を提供すること。
【解決手段】
送信部13より送信信号を送受波器11へ供給するとともに、送受波器11で受信した信号を受信部14へ供給する。送受波器11は、空孔率10%の多孔質PZT圧電体振動子で構成した。受信部14は、送信用信号と受信信号との差の周波数をとるヘテロダイン検波部を備えている。符号15は帯域通過フィルタである。符号17は、デジタルシグナルプロセッサであり、相関処理、FFTの演算処理を実行する。符号18は表示制御部であり、DSP17で求められたスモーカーのデータをモニタ19に適したビデオ信号に変換する。符号21はGPS電波受信用のアンテナであり、符号20はGPS信号から調査船1の位置を特定するための信号処理回路である。
(もっと読む)
GPS魚群探知装置
【課題】 従来の航法装置では、船が現地点で到達した位置までの過去の海底しか表示しないばかりでなく、不明瞭な地点間だけを線分で連結しているので、深さを目安に進行方向を決定するためには、表示画面からの情報を元に行わなければならなという問題があった。
【解決手段】 GPSアンテナ1にGPS受信器2が接続され、GPS受信機2に位置情報検出部3が接続され、この位置情報検出部3に位置情報メモリ4が接続され、位置情報メモリ4に方位・船速計算部5が接続され、この方位・船速計算部5の出力と地図データ出力部6からの出力は地図深度データ検出部7に入力され、さらに、地図深度テータ検出部7の出力は予想海底画像作成部8に入力され、この予想海底画像作成部8の出力は画像用メモリ9に記憶される。
(もっと読む)
ソナー・システム
【課題】船舶の移動中の操作を容易にし、船舶上の動く歩道からの高解像度画像を提供する船舶搭載可能ソナー・システムを提供すること。
【解決手段】船舶搭載可能な一体化ソナー・システムが提供される。船舶搭載可能な一体化システムは、少なくとも1つの画像ソナー・データ収集装置と、少なくとも1つの画像ソナー・データ収集装置に電気的、かつ取り外し可能に接続された少なくとも1つの処理システムとを含む。ソナー・データ収集装置は、好ましくは、処理システムに音響データを提供し、音響データを利用してソナー画像を生成する。また、システムは、関心のある標的の場所を突き止めるべく、データの正確な地理的に参照のためのデジタルのチルト及びアジマス方向を提供する。
(もっと読む)
移動プラットフォームから波の特性を判定するためのシステム及び方法
移動プラットフォームから1つ又は複数の波の特性を判定するシステム及び方法が開示される。超音波ドップラー式多層流向流速計のようなソナー・システムは、プラットフォームに対する水の動きをプロファイルすることができ、地球基準は、固定された地球基準に対するプラットフォームの動きの測度を求めることができる。水のプロファイルと地球基準測度との両方は、プラットフォームの動きを補償するために協働的に採用することができる。方向波スペクトルと非方向波スペクトルは、線形波理論により水面高さスペクトルに翻訳し、且つ有意な波の高さ、ピーク周期、及びピーク方向のような特性を計算するのに用いることができる。 (もっと読む)
GPS魚群探知装置
【課題】 解決しようとする問題点は、自船15の航跡には何も表示されていないために、通過してきた海域に魚群が存在するかどうかプロッタ上で把握することはできないという点である。
【解決手段】 超音波振動子17に発振器及び受信器を設けた魚群探知機18が接続され、魚群探知機18に魚群探知機制御回路19が接続され、魚群探知機制御回路19に反応検出部20が接続され、アンテナ21を設けたGPS受信器22に位置情報制御回路23が接続され、位置情報制御回路23の出力は表示制御回路24に入力され、表示制御回路24の出力は表示装置25に接続され、反応検出部20の出力は位置情報制御回路23に入力されている。
(もっと読む)
車両と物体との間の衝突防止を助けるための方法および装置
【課題】車両と物体との間の衝突防止を助けるための方法および装置に関し、物体が車両の運転者の視界から隠れている場合等であっても、物体からの音響信号を受信して物体の位置を検出し、車両と物体との間の衝突防止を助けることを目的とする。
【解決手段】本発明の方法および装置が、車両により支持されているマイクロホンを用いて、物体からの音響信号を受信し、車両および物体の環境に関連するトポロジ的データを用いて、環境の音響モデルを生成し、音響信号および環境の音響モデルを用いて、物体の位置を決定する。車両および物体の環境は、車両から物体を直接見ることを妨げるような構造を含む。
(もっと読む)
水底地形測量方法およびシステム
【課題】水深が深い場合であっても水底地形を精度よく測量できる水底地形測量方法およびシステムを提供する。
【解決手段】GPSアンテナ2とウインチ5を設置した作業船14に、ウインチ5で繰出しおよび巻き取られるケーブル6を介して、ナローマルチビーム測探ソナー8、3軸加速度計測器9および水深計10を設置した曳航体7を接続し、超音波水中位置測量装置11の送波器11aを曳航体7に、受波器11bを作業船14に取付け、作業船14の移動速度とウインチ5の駆動の少なくとも一方を制御して曳航される曳航体7の深さ位置を調整して水中移動させつつ、ナローマルチビーム測探ソナー8、3軸加速度計測器9、水深計10の検知データ、GPSアンテナ2から送信される作業船14の位置データ、受波器11bが受信した曳航体7の位置データを制御装置4に入力する。
(もっと読む)
標的像追尾装置、標的像追尾方法、および標的像追尾プログラム
【課題】標的像の認識率を向上させるとともに、標的追尾のための計算処理量が必要以上に増大することを防ぎ、標的追尾の成功率を向上させた標的像追尾装置を提供する。
【解決手段】標的像追尾装置が、探信波を送受信する送受波部3と、送受波部3が受信した反射波を画像フレームデータに変換するフレームデータ変換部4と、前記画像フレームデータを表示する表示部9と、標的像の抽出領域の位置を、前回の前記画像フレームデータにおいて抽出した最尤の標的像の絶対位置とし、前記抽出領域の寸法を、前記標的の最大速度と、前記探信波が送受信される周期と、に応じて設定する抽出領域設定部6と、前記抽出領域の前記標的像から最尤の標的像を抽出する標的像抽出部7と、前記最尤の標的像の相対位置を検出し、前記最尤の標的像の絶対位置を算出し、抽出領域設定部6に通知する標的像位置算出部8と、を備える。
(もっと読む)
スキャニングソナー装置および追尾方法
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
超音波計測装置
【課題】船体の三次元位置及びロール,ピッチ,ヨウの6条件を把握することなく、高速運航下においても、海底形状を連続計測することができる超音波計測装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、前記対象物からの反射波の情報を三次元計測結果として処理する処理手段とを備える超音波計測装置において、前記三次元計測結果を順次連結させる連結手段を含む。
(もっと読む)
魚群探知機
【課題】必要な魚探画像を効率よく記憶して記憶手段の小容量化を図り、低コスト化を図ることができる魚群探知機を提供する。
【解決手段】イベントマークIM1〜IMnの設定時には、使用者が設定操作した任意の位置での自船位置情報とともに魚探画像表示領域14b相当分の魚探画像A2がメモリに記憶され、それを後の再表示時に表示可能な構成とした。これにより、例えば魚探画像A2に魚影Fが現れた自船位置にて使用者がイベントマークIM1〜IMnの設定操作を行うと、その位置情報のメモリへの記憶とともにその位置付近のみの魚探画像A2がメモリに記憶されるため、記憶される個々の魚探画像A2のデータ量は少なくて済む。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
目標運動解析装置、目標運動解析方法プログラムおよび目標運動解析方法
【課題】目標体の運動モデルを等速直進運動とすると、目標体が変針変速することにより、変針変速前後の目標の運動を正しく解析できないという問題があった。
【解決手段】本発明の目標運動解析方法は、目標体の変針変速を検出した上で、時系列観測データを用いて変針変速時刻を推定し、さらに時系列観測データを用いて、基準時刻における目標体位置座標および、推定した変針変速時刻前後の等速直進区間毎の目標体の針路、速力を推定パラメータとする非線形最適化問題を解くことである。
(もっと読む)
目標運動解析プログラム、目標運動解析装置および目標運動解析方法
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、時系列観測方位データに対してバイアス誤差成分に関するインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム
【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
21 - 40 / 72
[ Back to top ]