
Fターム[5J083BB04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送信制御 (196) | 送信パルス制御 (84) | 送波間隔制御 (30)
Fターム[5J083BB04]の下位に属するFターム
Fターム[5J083BB04]に分類される特許
1 - 20 / 23
物体検出装置
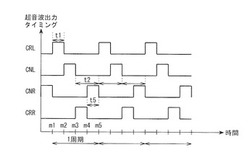
【課題】複数の超音波物体検出部により障害物検出を行う場合の、検出タイミングのばらつきを抑制する。
【解決手段】バンパ部11の長手方向の全域をカバーするように互いの間隔が略均等に配置された4つの超音波物体検出部CRL,CNL,CNR,CRRを駆動する際、左右何れか一端、例えば、左端の超音波物体検出部から中央に向かって順に駆動する。次に右端の超音波物体検出部から中央に向かって順に駆動する。つまり、超音波物体検出部CRL,CNL,CRR,CNRの順に駆動する。超音波物体検出部CNLおよびCNRはそれぞれ左端側から駆動した場合および右端側から駆動した場合の最後、つまり2番目に駆動されるため、走行車線の中央部付近の障害物検出は、超音波物体検出部CNLとCNRとにより、定周期で行われることになる。
(もっと読む)
超音波距離測定装置および輸送機器

【課題】測定対象までの距離を迅速に測定することが可能でかつ超音波の多重反射による測定精度の低下が防止された超音波距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】送信素子50は、各測定期間において、超音波を送信する。受信素子60は測定対象で反射された超音波を受信し、受信した超音波の強度に対応する受信信号を出力する。反射時間測定部90は、各測定期間において、受信信号の第1の反射成分の時間軸上の位置に基づいて測定対象までの距離に対応する時間を算出する。ピーク保持部110は、第1の反射成分の最大値を保持する。可変電源140は、保持された最大値に基づいて、次の測定期間において受信信号に第1の反射成分が出現するとともに第2の反射成分の出現が抑制されるように、次の測定期間において送信素子50により送信される超音波の強度を調整する。
(もっと読む)
位置算出装置、位置算出方法および位置算出プログラム
【課題】手の位置の誤検出を防止すること。
【解決手段】位置算出システムは、超音波発信機10、超音波受信機20a〜20c、位置算出装置100を有する。位置算出装置100は、超音波受信機20a〜20cから超音波の受信時間を取得し、超音波発信機10から音波が発信された時間から超音波受信機20a〜20cに超音波が到達するまでの到達時間を超音波受信機毎に特定する。位置算出装置100は、特定した複数の到達時間と、利用者1の人体の特徴から導かれる音波の到達時間とを基にして、到達時間を利用して超音波発信機10の位置を算出するか否かを判定する。位置算出装置100は、判定結果に基づいて、超音波発信機10の位置を利用者の手の位置として算出する。
(もっと読む)
相対方向推定方法並びに探索側端末及び被探索側端末
【課題】インフラ設備や特殊ハードウェアを必要とせず、一般的な携帯端末を用いて、端末間の相対方向を推定する。
【解決手段】探索側(a)は予め送信間隔を被探索側(b)に無線通知した上で、端末に加えるスウィング動作と同時にパルス列状の音波を送信し、また各パルス送信時の端末向きを記録しておく(a1)。受信録音している被探索側(b)は通知された送信間隔に相関の強い箇所を録音から識別抽出して、受信間隔を求め、探索側(a)に無線通知する。探索側(a)は受信間隔と送信間隔とを比較して(a2)(a3)、ドップラー原理に基づいて間隔の大小関係が入れ替わる時点に対応する端末向きを被探索側(b)の存在する相対方向として推定する。
(もっと読む)
車両周辺障害物監視装置
【課題】超音波センサでの障害物の検出性能への弊害をできるだけ抑えながら検出率の向上を実現することのできる車両周辺障害物監視装置を得る。
【解決手段】画像処理部4は、車両周囲の画像情報から、車両から見た障害物の位置の測定と障害物の種類の認識を行う。超音波センサ制御部3は、反射波選択閾値パラメタや超音波発信間隔パラメタに基づいて、超音波センサ1から発信する超音波の発信タイミングの制御と、受信した反射波の強度の情報から車両周囲の障害物の検出と、車両と障害物との距離の測定とを行う。パラメタ調整部5は、画像処理部4の処理結果に基づいて超音波センサ制御部3の制御パラメタを調整する。
(もっと読む)
合成開口ソーナー
【課題】送受波器の動揺を補正し、合成開口処理への影響を軽減した合成開口ソーナーを提供する。
【解決手段】仮想の単一配列に動揺を加えず基準位置との間の伝搬距離を計算する第1伝搬距離計算器と、複数配列に動揺検出処理部からの動揺量を擬似的に加えて基準位置との間の伝搬距離を計算する第2伝搬距離計算器と、それらの出力の伝搬距離差から動揺量を計算する補正量計算器と、この動揺量に基づいて受信信号に動揺補正を行なう動揺補正器と、i回目の送波とi+1回目の送波に対応する送波器と受波器の中間位置の一部が、一致するように送信タイミングを制御するPRF制御器と、i回目の送波とi+1回目の送波に対応する受信信号を出力する動揺補正器と、受信信号の目標との間の伝搬距離差から動揺量を検出する自己補正量計算器と、この動揺量に基づき受信信号にさらなる動揺補正を行なう自己動揺補正器とを組み合わせ、動揺補正を行なう。
(もっと読む)
別の無人機から放出されるスプリアスエコーの識別を有する無人機用の超音波テレメトリー法
方法が、a)所定の繰返し周波数で繰り返される超音波バーストの放出、及びb)各放出の終了後に、2つの連続する放出を分離する時間フレーム(n−1,n,n+1,...)の継続期間の間、同じフレーム中に現れる複数の連続する信号スパイクの受信を含む。これらのスパイクは、別の無人機の放出器から発生するスプリアススパイク(E’n−1,E’n,E’n+1,...)及び推定される距離に対応する有用スパイク(En−1,En,En+1,...)を含む。これらのスパイクを識別するために、以下のステップ、すなわち、c)2つの連続するフレームについて、現在のフレームのp個のスパイクの到達時間を、前のフレームのq個のスパイクの到達時間と比較し、p・q個の対のスパイクのそれぞれについて、対応する相対時間ギャップを求めるステップ、d)ステップc)で求められたp・q個のギャップに、現在のフレームの単一スパイクのみを保持することを可能にする選択基準を適用するステップ、及びe)こうして保持されたスパイクの到達時間の関数として距離を推定するステップが実行される。 (もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
面で囲まれる空間内部で作業を行う位置を特定する方法及び作業結果管理装置
【課題】ボイラ火炉等の面で囲まれる空間の内部の検査に用い、さらに複数の位置の検出が可能な容器の内部又は外壁の検査に用いられる位置特定方法及び作業結果管理装置を提供する。
【解決手段】面で囲まれる空間内部で作業を行う位置を特定する方法であって、前記空間内部の作業を行う位置が側壁であり、該側壁に略平行且つ位置座標が既知である同一直線上にない3点以上に音波信号を受信可能な受波器を設置し、前記空間の側壁の作業を行う位置に配置された音波を発信可能な送波器より信号を発信し、前記同一直線上にない3点以上の受波器それぞれに到達する前記信号の到達時間を計測し、前記到達時間と、前記3点以上の受波器の位置座標を用いて、前記送波器の位置座標を特定する
(もっと読む)
測位装置および測位方法
【課題】ノイズの影響を受けにくく、高い信頼性を有する測位装置を提供する。
【解決手段】測位装置は、パルス内で周波数成分が変化するTSP(Time Stretched Pulse)信号を発信する発信部10と、発信部10から所定の距離間隔を隔て、互いに離隔して配置されたTSP信号を受信する複数の受信部21、22、23と、各受信部21、22、23の位置情報を格納している記憶部30と、各受信部が受信したTSP信号の周波数成分の変化パターンに基づいて各受信部がTSP信号を受信した時間差を演算し、時間差と記憶部30から取得した位置情報とに基づいて発信部10の位置を演算する演算部40と、を備える構成とする。
(もっと読む)
超音波の変復調方法並びに距離検出方法、通信方法
【課題】耐ノイズ性を向上することができる超音波の変復調方法並びに距離検出方法、通信方法を提供する。
【解決手段】一定のパルス幅を有する複数の超音波パルスを、基準となる第1の時間間隔T1及び第1の時間間隔T1とは異なる第2の時間間隔T2のうちから予め決められた順序(擬似雑音符号によって決まる順序)で選択された時間間隔T1,T2を空けて送波することによって超音波を変調する。そして、変調された複数の超音波パルスと同一の波形と、受波波形との相関をとることで変調された前記超音波を復調する。故に、受波器5における残響の影響を受けずに超音波を変復調することができるとともに、相関の低いノイズ成分が除去されることで耐ノイズ性を向上することが可能である。
(もっと読む)
超音波画像化装置及び超音波画像化プログラム
【課題】対象物までの距離が長く、往復伝播時間を要する場合にも、高速の合成開口処理を可能とする超音波画像化装置及び超音波画像かプログラムを提供すること。
【解決手段】本超音波画像化装置によれば、超音波プローブを構成する各圧電素子TNNと超音波による画像化領域との間の最大距離と最小距離とを用いて、各圧電素子からの送信超音波が画像化領域Aで反射して戻ってきても混信せず、また、送信超音波と受信超音波が直接混ざることがない範囲で、送信時間間隔tを定義する。当該定義された送信時間間隔tを用いて超音波を送信し、得られた反射波を用いて、開口合成処理を実行する。
(もっと読む)
合成開口ソーナーシステムおよび送受波器の長さ制御方法
【課題】必要以上に長い送受波器の使用を防止可能な合成開口ソーナーシステムおよび送受波器の長さ制御方法を提供する。
【解決手段】送受信器11は、長さが可変であり、PRF調整器14は、送受波器11の長さを、検査対象物を調査するための調査条件に基づいて決定し、開口長制御部17は、送受波器11の長さを、その決定された長さに調整する。
(もっと読む)
自律走行装置およびプログラム
【課題】本体に対し2面に壁がある状況でも多重反射による誤検知を改善する自律走行装置を提供することを目的とする。
【解決手段】複数の超音波センサ2、3と、超音波センサ2を駆動する送信手段4と、超音波センサ3の受信信号を増幅する増幅手段8と、基準電圧設定手段6と、基準電圧と増幅手段8とを比較する比較手段7と、超音波の送信後の経過時間を計時する計時手段9と、本体1と障害物との距離を認識する距離判定手段11と、距離判定手段11の出力を受けて送信手段4と基準電圧設定手段6とを制御する制御手段5とを有し、制御手段5は、本体1の動作状態と距離判定手段11の出力に応じて送信手段4の送信方法を変更する。これによって、本体が壁や障害物に囲まれた状態で、本体が動作する際、近くに存在する壁や障害物による多重反射により障害物などの誤検知を改善することができる。
(もっと読む)
位置検出システム
【課題】送信装置の位置の追跡を可能とし、しかも受信装置の配置設計が容易かつ受信装置の施工作業の手間も従来構成に比較して少ない位置検出システムを提供する。
【解決手段】送信装置1は、検出対象に搭載され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体するワイヤレス信号により固有の識別データを送信する識別データ送信部12とを備える。受信装置2は、疎密波を受波し疎密波の到来方向の情報を含む受波出力を出力する疎密波受波部21と、識別データを含むワイヤレス信号を受信する識別データ受信部22とを備える。受信装置2では、疎密波受波部22により疎密波を受波する期間を、識別データが受信された後に設定した既定の受波可能時間内に制限する。
(もっと読む)
障害物検知装置
【課題】 ノイズによる誤報知を排除しつつ、障害物検知を早期に確定することができる障害物検知装置を提供すること。
【解決手段】 反射波を受波していないときには、各超音波センサ20FR、20FL、20RR、20RC、20RLを所定の周期T1で送受信動作させる。超音波センサ20が反射波を受波した場合には、その超音波センサ20が対応付けられた動作タイミング信号の周期を所定の周期T1よりも短い周期T2となるように制御し、その送受波動作の周期をT1よりも短いT2とする。
(もっと読む)
障害物検知装置
【課題】 確定すべき障害物の検知を早期に行うことができる障害物検知装置を提供すること。
【解決手段】 反射波を受波していないときには、各超音波センサ20FR、20FL、20RR、20RLを周期T1で送受信動作させる。一方、一の超音波センサが反射波を受波したときに、他の超音波センサが担当する検出エリア内の障害物検知の確定後、このセンサにおける反射波の受波が持続している場合には、一の超音波センサが対応付けられた動作タイミング信号S1の周期を所定の周期T1よりも短い周期T2となるように制御するとともに、他の超音波センサが対応付けられた動作タイミング信号S2の周期を所定の周期よりも長い周期T3となるように制御する。
(もっと読む)
障害物検知装置
【課題】 送信波の干渉を防ぎつつ、障害物が検知領域内に進入してからその障害物を検知するまでの時間を短縮すること。
【解決手段】 超音波センサ20RLに対して1個隔てて配置された超音波センサ20CRとの組み合わせによるグループAと、超音波センサ20RRに対して1個隔てて配置された超音波センサ20CLとの組み合わせによるグループBとに分割し、このグループ毎に送信波の送波及び反射波の受波を行う対象を順次切替えるとともに、この各グループに属する超音波センサに対する送波タイミングとして、各グループに属する全ての超音波センサが略同時に送信波を送波するように決定する。
(もっと読む)
音波伝搬距離推定方法及び音波伝搬距離推定装置
【課題】 従来は近距離捜索中は、遠距離水中物体の位置を求めることができず、存在を認知することができない。また、遠距離水中物体からの反射波は、送信直後の音波に対する近距離水中物体からの反射波とみなされ、水中物体を誤検出してしまう可能性がある。
【解決手段】 送信部200は、アップチャープの音波とダウンチャープの音波を交互に設定送信間隔で水中に送信する。水中物体で反射された音波は受信部300で受信される。相関処理部410は、整相加算部320から受け取った解析用信号と、送信波形との相関を計算する。反射波検出部420は、解析用信号の中に存在する水中物体からの反射波を検出し、その反射波がアップチャープとダウンチャープのどちらの送信波形に対する反射波かを判定する。概算距離推定部430は、反射波の高周波成分と低周波成分の減衰率の違いから、反射波のおおよその伝搬時間を推定することにより概算距離を推定する。
(もっと読む)
距離測定装置とプログラムおよび記録媒体
【課題】測定対象物までの距離如何にかかわらず、測定対象物の距離を正確に測定することができる距離測定装置を提供することを目的とする。
【解決手段】超音波送信部4と超音波受信部5のうち少なくとも超音波送信部4は、その送信条件を変更可能としたものである。これによって、例えば、測定対象物までの距離が短い場合は、超音波送信部4のエネルギーが小さい超音波を送信することにより、超音波の直接波を低減して、短距離の距離測定を可能とし、また、測定対象物までの距離が長い場合は、超音波送信部4のエネルギーが大きい超音波を送信することにより、超音波の反射波を大きくすることにより、距離測定を可能とするものである。よって、測定対象物までの距離如何にかかわらず、測定対象物の距離を正確に測定することができる。
(もっと読む)
1 - 20 / 23
[ Back to top ]