
Fターム[5J083BE18]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 比較 (268)
Fターム[5J083BE18]の下位に属するFターム
閾値レベル設定 (55)
予め定めた基準値と比較 (136)
環境データとの比較 (15)
前回の受信データと比較 (10)
平均値と比較 (4)
Fターム[5J083BE18]に分類される特許
21 - 40 / 48
魚群探知機
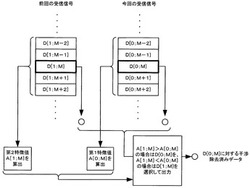
【課題】単体魚等の小さな物標からの有用なエコーを損なわずに、他の超音波装置からの干渉を除去できる魚群探知機を提供すること。
【解決手段】干渉除去対象とするデータの深度を含む第1深度範囲に属する今回のデータから求めた第1特徴値と、干渉除去対象とするデータの深度を含む第2深度範囲に属する前回のデータから求めた第2特徴値とを比較し、第1特徴値のほうが小さい場合は干渉除去対象とするデータをそのまま出力し、第2特徴値のほうが小さい場合は干渉除去対象とするデータと同じ深度の前回のデータを出力する干渉除去部を設ける。
(もっと読む)
物標探査装置、物標探査プログラム及び物標探査方法

【課題】音源から直接進行する進行波に混合した前方散乱波を用いて物標を正確に探査する。
【解決手段】伝搬空間内に音波を送波する音源と、前記伝搬空間内に存在する物標から前方に散乱する前方散乱波を受波する領域に配置されたトランスデューサアレイと、前記トランスデューサアレイに直接進行する進行波と前記前方散乱波との混合波から、前記トランスデューサアレイに直接進行した進行波を減じることにより、前記前方散乱波を分離する減算処理手段と、前記減算処理手段で分離した前記前方散乱波にパッシブ位相共役処理を行うことにより、前記前方散乱波の共役性相関信号を生成するパッシブ位相共役処理手段と、前記音源を基準位置として伝搬空間内の任意の位置に入射する進行波に自己相関処理を施すことにより、前記進行波の自己相関処理信号を生成する自己相関処理手段と、前記自己相関処理信号と前記共役性相関信号との相似性を判定する相関手段とを含む。
(もっと読む)
超音波センサ
【課題】車両の近傍に存在する障害物を検知する超音波センサのセンサヘッドが最適な位置に配置された超音波センサを提供する。
【解決手段】断続的に送信される超音波に対する障害物からの反射波に基づいて車両1の周辺の障害物検知を行う超音波センサの、超音波を送信する送信器と反射波を受信する受信器とを有してバックドア11に設置されるセンサヘッド20が、車両1の車幅方向の中心線Mの近傍であって、バックドア11の開閉側の端部12aの角部12bからセンサヘッド20までの距離D3が、センサヘッド20から地上に備えられる小型地上構造物Sまでの距離D7よりも短くなる位置20cに設置される。
(もっと読む)
値の比に基づくタッチイベントの検出方法と検出システム
【課題】改善された音響指紋及び一致アルゴリズム、並びに屈曲波タッチシステムに用いるための誤った信号データの改善された識別方法を提供する。
【解決手段】
タッチパネル上のタッチイベントを検出するための方法は、少なくとも2つのセンサから、タッチイベントに応答する少なくとも第1及び第2の信号を取得することを含む。上記第1の信号に関連づけられる第1の振幅値が計算され、上記第2の信号に関連づけられる第2の振幅値が計算される。上記第1及び第2の振幅値間の値の比が決定され、上記値の比に基づいてタッチ位置が識別される。
(もっと読む)
音響測定装置及び音響測定方法
【課題】高精度かつ簡単に音響インテンシティに代表される音の方向情報を測定することができる音響測定装置及び音響測定方法を提供する。
【解決手段】指向性を180度反対向きに配置された単一指向性マイクペアを用いて受音する受音部11と、単一指向性マイクペアの出力差分を用いて音の到来方向を含む音の方向情報の演算処理を行う演算処理部12と、音の方向情報を出力する出力部13とを備える。
(もっと読む)
物体検出装置、および車車間通信システム
【課題】車両の周囲に存在する物体を検出する物体検出装置において、路側物と二輪車等の車両とを精度よく識別できるようにする。
【解決手段】支援制御ECUは、車両検出処理において、複数のサイドカメラによる撮像画像に基づく画像処理と、複数のソナーによる検出タイミングの差分とによって検出した物体の各移動速度を比較することにより、物体が車両であるか否かを判定する。即ち、別々に検出した物体の移動速度を比較することによって、物体の移動速度を高精度に求め、この物体の移動速度に基づいて物体が車両であるか路側物であるかを識別できるようにしている。従って、路側物の形状が車両の形状と似ている場合であっても、この物体が路側物であるか車両であるかを誤判定することなく精度よく識別することができる。
(もっと読む)
距離測定装置
【課題】超音波センサーを水位センサーとして使用してドレン水受けに貯留したドレン水の満水を検知する場合に、反射波が戻るまでの時間をもとに算出される距離データ以外に受信量(電圧)データを採用して両者を比較することで正確な水位を検出できるようにした距離測定装置を得る。
【解決手段】水位センサー5としての超音波センサーから発信される超音波を測定用の媒体として距離を測定する距離測定装置において、受信波が測定されるまでの時間に基づいて距離を出力する手段と、受信量を出力する手段とを設けた
(もっと読む)
音響歪変並び音響脱焦点による立体画像処理
【課題】
広い領域からの情報を使用して、知られた物質内に含まれる散乱物体の音響画像処理情報を迅速に収集させる。
【解決手段】
本発明は平面画像からの情報を利用して散乱構造物の立体音響画像処理を行うシステムに関する。このシステムは特徴的センサアレイ300を使用してセンサアレイ300から対象物体内に信号を放出し、対象物体の平面表示を発生させる。この平面表示は複数のxとyの座標対と少なくとも1つの候補散乱構造物106とを含む。候補散乱構造物106形状は少なくとも1対のxとyの座標に限定される。続いてこの候補散乱構造物106のxとyの座標対は第1座標依存応答関数と比較され、散乱構造物のx、yおよびzの位置を立体空間に振り分ける。
(もっと読む)
障害物検出装置
【課題】障害物の種類に応じた専用の超音波センサを設けることなく、移動体の周囲に在る障害物の種類を判定することができる障害物検出装置を提供する。
【解決手段】超音波を用いて障害物10を検出する障害物検出装置100を、移動体の周囲に、送信波としてパルス状の超音波を送信するとともに、送信波の障害物10による反射波を受信して、反射波の強度に応じた受信信号を出力する超音波センサ110と、受信信号に基づいて、送信波に対応する反射波の数と反射波のピーク値を検出する反射状態検出手段120と、反射波のピーク値に基づいて、障害物10の有無を判定するとともに、反射波の数と複数の反射波が検出された場合における各ピーク値の大小関係との移動体の移動に伴う経時変化に基づいて、障害物10の種類を判定する判定手段120と、を備える構成とした。
(もっと読む)
移動物体検出装置
【課題】微少振動する物体を移動物体と誤検出することを抑制する。
【解決手段】ドップラー信号E,E’の振幅値がコンパレータ9C,9Dにおける第2のしきい値Th2(+),Th2(-)未満であれば微少振動する物体に反射した反射波と推測して象限信号発生回路80から象限信号Qを発生させないことで誤検出が抑制できる。さらに、ドップラー信号E,E’の振幅値がコンパレータ9C,9Dにおける第2のしきい値Th2(+),Th2(-)以上である場合、軸符号信号X,Yの位相差φが第1のしきい値Th1(+),Th1(-)と第2のしきい値Th2(+),Th2(-)との差に対応した基準値よりも大きいときにだけ象限信号Qを発生させ、軸符号信号X,Yの位相差φが基準値以下のときは演算回路83が移動物体検知の処理を行わないことにより、微少振動する物体を移動物体と誤検出することがより確実に抑制できる。
(もっと読む)
自律走行装置およびプログラム
【課題】自律走行装置の装置本体が壁に沿って移動する際でも障害物が検知できるとともに検知遅れがないようにした自律走行装置を提供することを目的とする。
【解決手段】制御手段5は、送信手段4により超音波を送信後、予め設定された期間の基準電圧設定手段6が設定する基準電圧を変更するようにしたものである。これによって、制御手段5は、送信手段4により超音波を送信後、予め設定された期間の基準電圧設定手段6が設定する基準電圧を装置本体1の動作モード(壁沿い動作モード時とそれ以外の動作モード)に応じて設定を変更するので、装置本体1が壁に沿って移動する際でも壁際の障害物が検知できるとともに検知遅れがないものとなる。
(もっと読む)
移動物体検出装置
【課題】移動物体の検出性能を維持しつつ消費電力を低減する。
【解決手段】本実施形態においては、コンパレータ9から出力される2値信号(ドップラー信号)が検知回路8(マイコン)の入力ポートから取り込まれ、例えば、ローレベルのドップラー信号が所定時間以上連続して入力された場合、監視空間内に移動物体Oが存在すると検知回路8が判断して検出信号を出力する。而して、コンパレータ9によってアナログのドップラー信号をディジタル信号(2値信号)に変換しているため、検知回路8でA/D変換を行う必要がないから消費電力が低減でき、しかも、消費電力を低減したことで連続動作が可能となって検出性能を維持することができる。
(もっと読む)
自己診断機能付きロボット
【課題】低コストで自己診断を行うことができる自己診断機能付きロボットを提供することを目的とする。
【解決手段】自己診断機能付きロボットを、ロボット本体1と、ロボット本体に設けられる超音波距離センサ16,22と、ロボット本体1に設けられる右腕部4a、左腕部4bと、これら右腕部4a、左腕部4bの動作を制御する駆動制御部56と、超音波距離センサ16,22、右腕部4a、左腕部4b、及び駆動制御部56の診断を行う診断部73とを有する構成とする。診断部73を、駆動制御部56に、右腕部4a、左腕部4bを超音波距離センサ16,22の検出領域内と検出領域外との間で移動させる動作指令を送ったのちに、超音波距離センサ16,22の出力信号に変動が生じなかった場合に、故障が生じていると判定する構成とする。
(もっと読む)
車両用周辺監視装置
【課題】車両用周辺監視装置において、短距離センサと長距離センサの圧電型超音波マイクロフォンを共用化、小型化、及び低コスト化すると共に検知距離によらない略同一の検知エリア幅の確保を可能とする。
【解決手段】超音波を送受信する略同一の圧電型超音波マイクロフォン2を用いて構成した近距離を主たる検知範囲とする短距離センサ3及び近距離、中距離、遠距離を主たる検知範囲とする長距離センサ4の両センサと、これらに超音波を送信させる送信駆動回路20と、受信波信号を増幅する増幅回路5,6と、信号強度に基づいて信号を出力するしきい値回路7と、送信駆動回路20を制御して障害物検出を行い、しきい値回路7からの出力に基づいて警報信号を出力する中央制御部9とを備える。増幅回路6と利得制御信号G1,G2,G3により検知利得を制御して長距離センサ4の近距離、中距離、遠距離における検知エリア幅を略等しくする。
(もっと読む)
物体位置検出装置
【課題】アレイ素子の間隔がλ/2より大きく配置された物体位置検出装置において、送信波を周囲に漏れなく送信すること、及び、反射波の各素子間の位相差から物体の方位を一意に決定すること。
【解決手段】送信波を送信する際には、各素子40A、40Bに入力する送信信号間の位相を同相と逆相に交互に切り替える。これにより、送信波の合成出力がゼロとなるヌル点を補完することができ、送信波を周囲に漏れなく送信することができる。反射波から物体の方位を算出する際には、反射波の各素子40A、40B間の位相差から算出される物体の方位の候補の中から、各素子40A、40B間の受信時間差の符号、及びその時間差の絶対値が時間差基準値以上か否かに基づき、物体の方位を決定する。
(もっと読む)
車両用周辺監視装置
【課題】車両用周辺監視装置において、センサが、障害物を検出してから、検出確定されるまでに要する時間を短縮し、運転者への警告を迅速に行う。
【解決手段】複数のセンサは、所定の順番に従って、検出動作を行う。1番目のセンサが検出動作を行い(S1)、センサが障害物を検出した場合は(S2でYES)、所定の回数(N回)だけ連続して検出動作を行い(S3)、障害物の検出回数が所定の検出確定累積回数(M回)を超えたか否かを判断する(S4)。検出確定累積回数を超えた場合は(S4でYES)、ブザー及び表示部等を用いてユーザに障害物が検出された旨の警告を行う。また、検出確定累積回数を越えていない場合は(S4でNO)、所定の順番に従って、次のセンサの検出動作に移る(S6)。一方、障害物を検出しなかった場合は(S2でNO)、S3以降の処理を行わないで、次のセンサの検出動作に移る(S6)。
(もっと読む)
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体
【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
物体計測装置
【課題】送出した超音波の反射信号に基づいて計測対象物の幅を計測する。
【解決手段】送信制御手段3の制御に従い、所定の異なる周波数の送信信号を送出する送信手段1と、計測対象物により反射されて生じた反射信号を検出する複数の受信手段2と、反射信号ごとの受信方向角を算出する受信方向検出手段4と、計測対象物との距離を算出する距離算出手段5と、送信信号のうち第1周波数の送信信号に対する第1反射信号を抽出するとともに記第1周波数よりも低い周波数の第2周波数の送信信号に対する第2反射信号を抽出する反射信号抽出手段6と、第1反射信号に基づいて算出された受信方向角θ1及び距離d1と、第2反射信号に基づいて算出された受信方向角θ2及び距離d2とに基づいて計測対象物の物体幅を算出する物体幅算出手段7とを有する。
(もっと読む)
信号検出方法及び信号検出装置
【課題】 従来は、しきい値を下げるほど正弦波信号の検出はし易くなるが、同時に、雑音を正弦波信号として誤検出する可能性が高くなるという課題がある。
【解決手段】 正弦波信号と雑音の和の受信信号の包絡線確率密度は、正弦波信号が存在しない場合にはレイリー曲線分布となり、正弦波信号が存在する場合は正弦波信号のSN比が大きくなるにつれて正規分布に近付くということに着目し、レイリー曲線分布を特徴化して、データベース4に予め比較用特徴データを格納しておく。特徴抽出回路2は、受信信号の包絡線信号の平均値Sμ1を算出し、それを包絡線確率密度の分布特徴を示す特徴データとして出力する。比較判定回路3は、特徴抽出回路2からの特徴データと、データベース4から出力された比較用特徴データとを比較して、受信信号中の正弦波信号の有無を判定する。従って、従来のしきい値を下まわるレベルの正弦波信号の検出ができる。
(もっと読む)
超音波人体センサ及びそれを有するトイレ装置
【課題】 トイレ空間のように狭く、多くの反射部材が存在する空間で複雑な反射を発生する状況でも人体の検知を容易に行える超音波人体センサに関する。
【解決手段】 監視空間に向け超音波を間欠的に送信し、送信に対する反射波を受信する超音波人体センサにおいて、受信波形変換手段から出力される受信波形データのうち、人体が存在していないタイミングで得られる受信波形データを基準波形データとして記憶する基準波形記憶手段と、前記受信波形変換手段から順次出力される受信波形データと前記基準波形データとを比較して前記両波形データ間に差分が認められる場合に人体が存在すると判定する判定手段とを有するとともに、前記判定手段は、前記差分が認められない状態となっても、その直前に、前記監視空間の近距離側の領域の差分が認められる時間が所定時間以上継続していた場合、人体が近接して存在すると判定する。
(もっと読む)
21 - 40 / 48
[ Back to top ]