
Fターム[5J083BE21]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 比較 (268) | 予め定めた基準値と比較 (136)
Fターム[5J083BE21]に分類される特許
1 - 20 / 136
超音波センサ
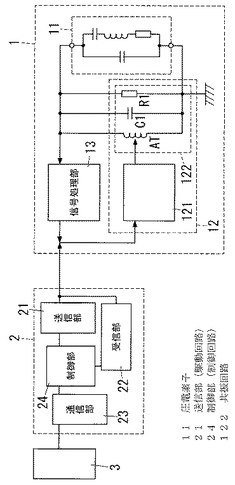
【課題】 断線の発生箇所の特定が容易な超音波センサを提供する。
【解決手段】 圧電素子11と、圧電素子11に並列に接続された共振回路122とを備える。圧電素子11は、制御部24に制御された送信部21から共振回路122を介して入力される駆動信号により駆動される。まず、駆動信号の周波数を所定の第1駆動周波数とするとともに共振回路122側からの入力に基いて断線の有無を判定する第1判定動作が行われる。この第1判定動作において断線があると判定された場合には、駆動信号の周波数を第1駆動周波数よりも共振回路122単体の共振周波数に近い第2駆動周波数とするとともに、共振回路122側からの入力に基いて、断線が共振回路122の前段側と後段側とのいずれにあるかを判定する第2判定動作が行われる。第2判定動作により、断線の発生箇所の特定が容易となるから、修理が比較的に容易となる。
(もっと読む)
超音波センサ

【課題】超音波センサにおいて、自装置の異常を判別して、障害物に関する正確な情報を得る。
【解決手段】送波駆動回路が、振動子の共振周波数とは異なる周波数f1で振動子を駆動する(S11)。この結果、検知ゲート時間内に、受波増幅回路から受波信号が入力されたときに(S12でYES)、この受波信号の周波数が、共振周波数f0と同じである場合に限り(S13でYES)、超音波センサが異常と判定される(S14)。ここで、周波数f1で振動子を駆動したときに、検知ゲート時間内に共振周波数f0の受波信号が入力された場合、その受波信号は、残響信号とみなせる。そして、検知ゲート時間内に残響信号が入力されたということは、超音波センサに、振動子に寄生する振動部が生じていることに起因する異常が発生していることを意味する。従って、S11〜S14のような処理を行うことにより、超音波センサが異常であるか否かを正確に判別できる。
(もっと読む)
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
超音波センサ
【課題】送信用と受信用の両ホーンを離間させずに回折波の影響による検出精度の低下を抑制することができる超音波センサを提供する。
【解決手段】超音波センサの送信素子3や受信素子9に取り付ける送信用ホーン5や受信用ホーン7として、超音波Uや反射波Rの伝播方向Xに、超音波Uの波長λの4分の1(λ/4)の寸法差ΔLhがある2つの音響ホーン体41,43を有するホーン筐体40を用いた。そして、送信側と受信側との間で逆位相の回折波A1の振幅と回折波A2の振幅とを一致させて、両回折波A1,A2を、受信素子9の手前の、スクリーン45で音響ホーン体41,43毎に仕切られていないホーン筐体40の共有音響空間47において相殺させる構成とした。
(もっと読む)
検知装置および検知方法
【課題】所望の音を高精度に検知することのできる検知装置を提供する。
【解決手段】音を検知するセンサと、センサにより検出された音の音響信号波形の振幅がゼロとなるゼロクロス点を検出するゼロクロス点検出部102と、ゼロクロス点間の音響信号波形の振幅の絶対値の総和である波形面積を算出する波形面積算出部103と、波形面積算出部103により算出された波形面積と、予め設定された閾値とを比較し、波形面積が閾値よりも大きい場合に異常が発生したと判断する異常判断部104とを備える。
(もっと読む)
位置出力装置、位置出力システムおよびプログラム
【課題】音声を発生する話者の三次元位置を、より良好に把握することができる位置出力装置等を提供する。
【解決手段】装着者の口からの距離が互いに異なる2つと水平方向の距離が離れた2つを含み話者の音声を取得する少なくとも3個以上設けられるマイクロフォン11a,11b,11cと、装着者の口からの距離が互いに異なる2つのマイクロフォン11a、マイクロフォン11cで取得される音声の音圧差に基づいて、話者が装着者か他者かを識別する識別手段と、識別手段によって話者が他者と識別された場合に、話者の三次元位置を導出するための数値計算の初期値を選択する初期値選択手段と、初期値選択手段により選択された初期値を用いた数値計算により話者の三次元位置を導出する位置導出手段と、を備えることを特徴とする端末装置10。
(もっと読む)
多重検知装置及びその方法
【課題】多数の超音波センサーが互いに異なる送信周波数を使用するようにして単一の分析集積回路を使用できるようにした多重検知装置及びその方法を提供する。
【解決手段】該当送信周波数の超音波信号を発信する送波部110と、送波部110から発信した超音波信号を受信して出力する受波部130を備えた多数の超音波センサー100と、多数の超音波センサー100の各送波部110に対して該当送信周波数の超音波信号を発信するように制御し、各受波部130から出力した超音波反射信号を受信して発信時間と受信時間との時間差を利用して超音波センサー100が検知した物体の距離を計算して出力する分析集積回路200と、を含む。
(もっと読む)
障害物検知装置
【課題】超音波ソナーの音圧を測定することなく、超音波ソナーの感度の補正を行うことが可能な障害物検知装置を提供する。
【解決手段】2つの超音波ソナー2a、2bは、受信モードが設定されたときに、送受信モードが設定された超音波ソナーの記憶媒体14に記憶された受信ゲインを取得し、当該受信ゲインと自分自身の記憶媒体14に記憶された受信ゲインとから補正値を求める。そして、この補正値に基づいて自分自身の受信ゲインを調整することにより、受信モードが設定された超音波ソナーの感度と送受信モードが設定された超音波ソナーの感度とを等しくする。こうして、超音波ソナーの音圧を測定する工程を追加することなく、超音波ソナーの感度の補正を行うことができる。
(もっと読む)
超音波距離測定装置および輸送機器
【課題】測定対象までの距離を迅速に測定することが可能でかつ超音波の多重反射による測定精度の低下が防止された超音波距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】送信素子50は、各測定期間において、超音波を送信する。受信素子60は測定対象で反射された超音波を受信し、受信した超音波の強度に対応する受信信号を出力する。反射時間測定部90は、各測定期間において、受信信号の第1の反射成分の時間軸上の位置に基づいて測定対象までの距離に対応する時間を算出する。ピーク保持部110は、第1の反射成分の最大値を保持する。可変電源140は、保持された最大値に基づいて、次の測定期間において受信信号に第1の反射成分が出現するとともに第2の反射成分の出現が抑制されるように、次の測定期間において送信素子50により送信される超音波の強度を調整する。
(もっと読む)
移動体検出装置
【課題】部品点数を増大させることなく窓ガラスに加わる衝撃の有無の検出と移動体の有無の検出との両方を実行することのできる移動体検出装置を提供する。
【解決手段】送波信号を発振する発振回路12と、超音波を送波する送波器10と、超音波が移動体A1に反射して生じる反射波、又は窓ガラスに衝撃が加えられた際に生じる超音波を受波して受波信号E0を出力する受波器11と、送波信号と同じ周波数の基準信号E1,E2と受波信号E0との周波数差に基づいてドップラー信号E3,E4を出力する位相検波回路14,15と、ドップラー信号に基づいて移動体A1の有無を判定する移動体判定部2と、ドップラー信号の振幅成分を演算し、当該振幅成分と予め設定された判定値とを比較することで衝撃の有無を判定する衝撃判定部3とを備え、各位相検波回路14,15に入力される基準信号E1,E2は、互いに位相が異なる。
(もっと読む)
超音波距離測定システム
【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
物体検知装置
【課題】コストを増大することなく極近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】超音波を送受波する超音波振動子1と、物体A1からの反射波の受波に要する時間に基づいて近距離及び遠距離の物体A1を検知する第1のゲート期間G1及び第2のゲート期間G2を設定する制御部4とを備え、制御部4は、両ゲート期間G1,G2で反射波を受波した状態から第2のゲート期間G2のみで反射波を受波する状態に移行すると、第1のゲート期間G1で検知する位置よりも近い位置に物体A1が存在すると判定する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
侵入検知装置
【課題】低消費電力化を図りつつ人以外の移動物体の誤検知を抑制する。
【解決手段】本実施形態の侵入検知装置では、ドップラ信号の信号レベルが所定の閾値(窓ガラス破壊検知の閾値)を超えるまでは判定部6が送波部1の超音波の送波を停止させ、ドップラ信号の信号レベルが前記閾値を超えたら判定部6が送波部1に超音波を送波させるようにしている。このため、窓ガラスの破壊が検知されなければ送波部1が送波を停止することで低消費電力化を図ることができる。しかも、窓ガラスの破壊が検知された後に侵入検知の処理が実行されるため、人以外の物体の移動(例えば、立て掛けられた書類や日除け<サンシェード>などの倒れ)による侵入者の誤検知が抑制できる。
(もっと読む)
受信時間の検出方法
【課題】信号の振幅が異なっていても、受信信号の所定の角度位置を検出点とすることができる、受信時間の検出方法を得る。
【解決手段】受信した信号を1周期の4倍以上の整数倍のサンプリング周波数でサンプリングする。隣接する角度位置にある2つのサンプリング位置におけるサンプリング値を比較して、信号の波形の立上り部分を検出する。立上り部分における2つのサンプリング値の差の絶対値を比較して、最も振幅の大きい部分における立上り部分のゼロクロス位置を検出する。
(もっと読む)
死角車両検知システム、死角車両検知装置、死角車両検知方法およびそのプログラム
【課題】死角車両の音源の方向を正確に検知する。
【解決手段】自車両に配置され、車外音を集音する集音部102と、死角車両の回折音の音圧が死角車両の反射音の音圧より大きくなる音圧閾値を保持しており、集音部102で集音された車外音の音圧が音圧閾値より大きいか否かを判定する音圧閾値処理部103と、音圧閾値処理部103で車外音の音圧が音圧閾値より大きいと判定された場合に、集音部102で集音された車外音から、死角車両の音源の方向を検知する車両検知部105と、を備える。
(もっと読む)
駐車空間検出装置
【課題】従来とは異なる新規な方法で、精度よく障害物間のスペースの長さを検出することを目的とする。
【解決手段】距離センサによって測定された距離およびその時点における距離センサの位置を繰り返し測定し、測定された距離およびセンサ位置をそれぞれ半径および中心とする検出円を算出し、各検出円上に駐車車両の輪郭点を算出するため、連続する2つの検出円C1、C2の共通外接線Tを算出し、検出円C2と共通外接線Tの接点を輪郭点とし、このように算出された各輪郭点に基づいて、駐車車両の端部を算出する。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
車載用障害物検出システム
【課題】意匠性が低下することなく障害物の検知範囲の広い車載用障害物検知システムを提供する。
【解決手段】車載用障害物検出システムは、超音波を送信してその反射波を受信する複数のセンサ20(20a〜20c)と、車両に搭載されるECU10に設けられた制御部11とを備える。制御部11は、各センサ20による反射波の受信に基づいて障害物が存在するか否かを判断する検知手段12を有する。制御部11は、センサ20aを基準センサとして超音波を送信し、他のセンサ20(20b、20c)の各々について、反射波を受信した受信タイミングと、センサ20aが反射波を受信した受信タイミングとの時間差を求める。制御部11は、センサ20aの送信タイミングを基準として、他のセンサ20の送信タイミングは、先に求めた時間差だけ逆方向にずらすよう設定する。
(もっと読む)
1 - 20 / 136
[ Back to top ]