
Fターム[5J083CC03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 振動子駆動 (44) | 発振回路 (32) | トーンバースト (20)
Fターム[5J083CC03]に分類される特許
1 - 20 / 20
超音波センサ
車両用障害物検知装置
【課題】地面による反射波の影響を受けにくい車両用障害物検知装置を提供する。
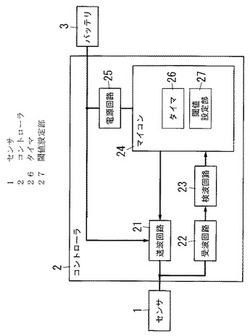
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、センサ1による送波からの時間を計時するタイマ26と、タイマ26が計時する時間に応じて閾値を設定する閾値設定部27とを備える。閾値設定部27は、地面9からの反射波を考慮しない場合の閾値に、検知期間を開始する時刻における地面9からの反射波の影響を除去するための補正値を加えた閾値を設定し、障害物の有無を判断する検知期間内においてタイマ26の計時する時間が経過するにつれて段階的に閾値を小さく設定する。
(もっと読む)
車両用障害物検知装置

【課題】電源からセンサに供給される電圧が変動する場合であっても、障害物を検知する距離を比較的大きくとることを可能にする。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、電源電圧を検出する電圧監視部26を備え、電圧監視部26が検出した電源電圧が低いほど閾値を小さく設定する。
(もっと読む)
超音波センサ
【課題】 断線の発生箇所の特定が容易な超音波センサを提供する。
【解決手段】 圧電素子11と、圧電素子11に並列に接続された共振回路122とを備える。圧電素子11は、制御部24に制御された送信部21から共振回路122を介して入力される駆動信号により駆動される。まず、駆動信号の周波数を所定の第1駆動周波数とするとともに共振回路122側からの入力に基いて断線の有無を判定する第1判定動作が行われる。この第1判定動作において断線があると判定された場合には、駆動信号の周波数を第1駆動周波数よりも共振回路122単体の共振周波数に近い第2駆動周波数とするとともに、共振回路122側からの入力に基いて、断線が共振回路122の前段側と後段側とのいずれにあるかを判定する第2判定動作が行われる。第2判定動作により、断線の発生箇所の特定が容易となるから、修理が比較的に容易となる。
(もっと読む)
超音波センサ
【課題】超音波センサにおいて、自装置の異常を判別して、障害物に関する正確な情報を得る。
【解決手段】送波駆動回路が、振動子の共振周波数とは異なる周波数f1で振動子を駆動する(S11)。この結果、検知ゲート時間内に、受波増幅回路から受波信号が入力されたときに(S12でYES)、この受波信号の周波数が、共振周波数f0と同じである場合に限り(S13でYES)、超音波センサが異常と判定される(S14)。ここで、周波数f1で振動子を駆動したときに、検知ゲート時間内に共振周波数f0の受波信号が入力された場合、その受波信号は、残響信号とみなせる。そして、検知ゲート時間内に残響信号が入力されたということは、超音波センサに、振動子に寄生する振動部が生じていることに起因する異常が発生していることを意味する。従って、S11〜S14のような処理を行うことにより、超音波センサが異常であるか否かを正確に判別できる。
(もっと読む)
アラーム発生装置、超音波探知装置、アラーム発生方法、超音波探知方法、アラーム発生プログラム、超音波探知プログラム
【課題】ユーザの所望とする魚種が検出されたときにのみ、正確且つ適切に、ユーザへ通知を行う。
【解決手段】超音波パルス信号のエコー信号から探知データを生成する(S101)。探知データに基づいて魚群(単体魚)エコーの検出、深度、底質等の魚種によって特徴が異なる判定用情報を検出する(S102)。魚種に応じて予め設定された複数のアラーム発生条件毎に、判定用情報を検証する(S103)。複数のアラーム発生条件のうち一つでも判定用情報によって満たされていなければ、アラームは発生しない(S104:No)。一方、全てのアラーム発生条件が判定用情報によって満たされていれば(S104:Yes)、アラームを発生して放音する(S105)。
(もっと読む)
映像取得装置
【課題】焦点位置以外であっても方位分解能が優れ、水の濁度や照度に関わらず広い視野の映像を取得することができる映像取得装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、を備える映像取得装置において、前記送波器と前記対象物の間に、前記反射波を収束させる可動音響レンズを備える。
(もっと読む)
超音波距離測定システム
【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
物体検出装置
【課題】人に特徴的な性質を利用して、静止した人とそれ以外の静止した物体との識別が可能な物体検出装置を提供することを目的とする。
【解決手段】超音波を送受信する超音波センサ1001と、超音波センサ1001を駆動する駆動信号を生成する発信制御部1002と、超音波センサ1001から出力される受信信号から人かそれ以外の物体かを識別する人識別処理部1004とを含んで構成され、人識別処理部1004は、各回の超音波送受信で得た受信信号の時系列パターンの時間的な変動量に基づいて障害物が人であると識別する。
(もっと読む)
超音波検知装置
【課題】振動子や駆動回路の素子定数がばらついていた場合であっても、残響時間を短くすることができる超音波検知装置を提供すること。
【解決手段】超音波を送受信する振動子50と、振動子50を駆動する駆動回路40と、駆動回路40による振動子50の駆動を制御するものであり、振動子50から検知用の超音波を送信させるための送信パルスを駆動回路40に対して印加するとともに、振動子50の残響を抑制するための制振パルスを送信パルスの印加後から所定時間遅延させて駆動回路40に対して印加する制御回路10と、予め測定された振動子50及び駆動回路40に固有の素子定数に基づいて残響時間が所定値となるように設定された制振パルスのパルス幅twと制振パルスの印加タイミングとしての送信パルスの印加終了時点からの遅延時間tdとからなる制振パルス条件が記憶された記憶部20とを備える。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた振動速度分布図から前記探知対象物の位置を特定する音波を用いた探知方法であって、音波発信源から音波を照射し、前記被照射体の表面を振動させる工程と、前記被照射体の表面のn箇所(n≧2)の測定個所を、各々、P1、P2・・・Px・・Pn(xは1〜nの整数)とし、それらの測定箇所の各々において、照射した音波の周波数がωである場合の前記被照射体の表面の振動速度を測定し、Pxにおける前記振動速度をEx(ω)とする工程と、特定の情報処理を行う工程とを備える探知方法。
(もっと読む)
別の無人機から放出されるスプリアスエコーの識別を有する無人機用の超音波テレメトリー法
方法が、a)所定の繰返し周波数で繰り返される超音波バーストの放出、及びb)各放出の終了後に、2つの連続する放出を分離する時間フレーム(n−1,n,n+1,...)の継続期間の間、同じフレーム中に現れる複数の連続する信号スパイクの受信を含む。これらのスパイクは、別の無人機の放出器から発生するスプリアススパイク(E’n−1,E’n,E’n+1,...)及び推定される距離に対応する有用スパイク(En−1,En,En+1,...)を含む。これらのスパイクを識別するために、以下のステップ、すなわち、c)2つの連続するフレームについて、現在のフレームのp個のスパイクの到達時間を、前のフレームのq個のスパイクの到達時間と比較し、p・q個の対のスパイクのそれぞれについて、対応する相対時間ギャップを求めるステップ、d)ステップc)で求められたp・q個のギャップに、現在のフレームの単一スパイクのみを保持することを可能にする選択基準を適用するステップ、及びe)こうして保持されたスパイクの到達時間の関数として距離を推定するステップが実行される。 (もっと読む)
超音波センサ
【課題】受信素子の特性のばらつきによらず、精度の高い方位検出が可能な超音波センサを提供する。
【解決手段】一方の変換素子からの受信信号Raに対するA/D変換を実行し、超音波の一周期Tc分に相当する4個の変換データを取得すると、その取得した変換データを加減算することにより同相成分Ip,直交成分Qpを算出(S110〜S130)。この同相成分Ip,直交成分Qpから算出した振幅Apが受信検出閾値THより大きい場合、反射波を受信したものとして、先に算出した同相成分Ip,直交成分Qpから位相φp(=φa)を算出する(S140〜S160)。その後、他方の変換素子からの受信信号Rbを対象として、上述の場合と同様に、変換データの取得、同相成分Ip,直交成分Qpの算出、位相φp(=φb)の算出を行い、更に、位相φa,φb間の位相差に基づいて超音波の到来方向を算出する(S170〜S210)。
(もっと読む)
データセンタ装置の物理的位置を自動決定するシステム及び方法
本発明は、データセンタにおける関連する超音波エミッタを有する少なくとも1つの装置の物理的位置を自動検出するシステム及び方法に関する。当該システムは、データセンタにおける既知の位置を有する複数の超音波検出装置を有する。コントローラが、テスト対象の装置に関連する超音波エミッタから超音波信号を生成することを開始する。到着時間回路は、超音波信号の受信時間に基づき各超音波検出装置に関連する到着時間情報を生成する。コントローラは、データセンタ内の超音波検出装置の既知の位置と各超音波検出装置に関連する到着時間情報とに基づきテスト対象の装置の位置を決定する。  (もっと読む)
(もっと読む)
物体認識装置
【課題】探知領域内に存在する物体について、ビームの形成及びその走査を行うことなく、所定の物体を検知できるようにする。
【解決手段】反射波検出回路32a,32b,・・・32hは、反射波の先頭位置を検出したときに“1”を遅延回路44a,44b,・・・44hへ出力する。受信側のシフトレジスタ41a〜41hは遅延回路44a〜44hから出力された値を転送クロック信号に応じて順次シフトする。自動車からの反射信号を受信した場合、自動車のボディの境界を代表する複数の位置の一つの位置からの反射に対して先頭を表す“1”が、送信側のシフトレジスタ41iと受信器1a〜1hごとのシフトレジスタ41a〜41hの或る特定のレジスタ(段)に存在することになる。これらのレジスタのすべて又は殆どに“1”が存在することをand回路423で検出することによって、自動車のボディを認識する。
(もっと読む)
超音波センサ
【課題】 圧電素子からなるセンサ素子がアレイ状に配置されて一体的に構成される超音波センサにおいて、振動ノイズを抑制することができる超音波センサを実現する。
【解決手段】 発信素子13r、受信素子13qなどを制御する回路素子18は、アンプ21qと、位相同期回路22と、距離測定用同期検波回路23、方向測定用同期検波回路24と、発信素子13rから受信素子13qに伝達される振動ノイズを除去するために圧電素子11qを駆動させる制御信号を発信素子13rから出力された発信信号に基づいて出力する制御信号発生回路26と、を備えている。制御信号発生回路26は、振動減衰部材41などの構造体内部を伝播してくる受信波形と逆位相になる様に圧電素子11qを駆動する制御信号を出力するため、振動ノイズをキャンセルすることができる。
(もっと読む)
パルス信号の送受信装置および送受信方法
【課題】パルス圧縮されたエコー信号のレンジサイドローブの振幅を小さくすることのできる、パルス信号の送受信装置および送受信方法を提供する。
【解決手段】信号生成部11は、ガウス関数で振幅制御されたダイナミックレンジ30dB、40dBのチャープ信号からなる送信信号および参照信号を生成する。参照信号は、フィルタ係数としてマッチドフィルタ7の係数メモリに設定される。また、送信信号と略同じ波形の送信パルスが振動子1から送信され、エコー信号が振動子1で受信される。補正フィルタ6は、A/D変換器5でデジタル化されたエコー信号に対して、ダイナミックレンジを拡大する補正および波形歪みを除去する補正を施す。マッチドフィルタ8は、補正フィルタ6で補正されたエコー信号と係数メモリに設定された参照信号との相関演算を行うことにより、パルス圧縮されたエコー信号を出力する。
(もっと読む)
超音波送受波器
【課題】従来の有底筒状ケースをエポキシ系等の成形樹脂ケースを用いた超音波送受波器において、有底筒状ケースと圧電素子を接着剤で貼り合わせを行うが工数がかかる他、特性のバラツキ、信頼性の低下が懸念される問題がある。
【解決手段】超音波送受波器において、有底筒状樹脂ケースの底面内部に圧電素子を貼り合わせてユニモルフ振動子を構成し、この振動体のケース外側面にて超音波の送信、受信を行う超音波送受波器において、有底筒状樹脂ケースと圧電素子の接着を有底筒状樹脂ケースの成型時に同時に一体成形することで強固な接合構造と特性の安定化、信頼性の向上を実現することが出来る。
(もっと読む)
水中探知装置
【課題】水平・垂直複合モードなどのように複数の送信ビームを連続して形成しても、その送信ビームに対して得られる探知画像の感度差を低減することを目的とする。
【解決手段】本発明における水中探知装置は、ビームの送受信により水中の探知を行う水中探知装置において、送信周波数の異なるN個の送信ビームを順次送波する振動子と、前記振動子を駆動するための送信信号を増幅する送信アンプと、前記送信アンプが前記送信信号を増幅するために要する電力を蓄えるコンデンサと、前記N個の送信ビームの送信周波数に対応した周波数成分毎に受信信号を抽出するフィルタと、最初の送信ビームを送波する際の前記コンデンサの電圧と第M番目の送信ビームを送波する際の前記コンデンサの電圧とに基づいて、該第M番目の送信ビームに対応する受信信号の利得を補正する利得補正部とを備えることを特徴とする。
(もっと読む)
超音波送信装置および水中探知装置
【課題】比較的少ない個数のスイッチング素子を用いて、超音波信号の振幅を容易に制御することのできる超音波送信装置を提供する。
【解決手段】ドライバ回路5に所定の入力信号IN1〜IN3が入力されると、振動子3の共振周期(共振周波数の逆数)の半周期ごとに、FET21が所定期間だけオンすると共にFET22および23が当該所定期間だけ交互にオンする。また、FET21がオフである期間は、FET22および23が共にオンする。つまり、正電圧と負電圧とが共振周期の半周期ごとに交互に振動子3の両端に印加される。この結果、振動子3が振動して共振周波数の正弦波状の超音波信号が振動子3から水中に送信される。また、超音波信号の振幅の変更は、共振周期の半周期に対する上記所定期間の比率を変えることにより行われる。
(もっと読む)
1 - 20 / 20
[ Back to top ]