
Fターム[5J084AA04]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 位置、座標 (319)
Fターム[5J084AA04]に分類される特許
161 - 180 / 319
光走査型光電スイッチ

【課題】小型化と共に、取り付け位置の制約を改善し得る光走査型光電スイッチを提供する。
【解決手段】外部へ信号生成手段で生成された信号を出力すると共に電源ラインを含む第1コネクタ5を備え、第1コネクタ5に接続される第2コネクタ付のケーブルの第2コネクタを受け入れ可能な凹所15が筐体1に形成され、第2コネクタ付のケーブルのケーブル部分を受け入れ可能な第1および第2溝61,62が筐体1に形成され、凹所15および各溝は第2面E2から軸線方向Zに向って後退しており、凹所15および第1溝61は光学素子の配列に沿った外縁Eeから筐体1の内方に向って後退しており、第2溝62は第1面E1から筐体1の内方に向って後退しており、凹所15が第1溝61を介して第2溝62に連なっていることを特徴とする。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法

【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
位置計測装置及び位置計測処理方法
【課題】測距精度を向上させるとともに、位置分解能を向上させた位置計測装置及び位置計測方法を提供する。
【解決手段】レーザ光を用いる位置計測装置において、受光感度の異なる光検知器を有する複数の受光回路12〜14を設ける。光検知器の受光視野が互いに一部重なるように、受光回路を配置する。測距回路15〜17において対応する受光回路からの受信信号に基づいて測距値及び受信レベルを求める。制御部18は、測距回路からの受信レベルに基づいて、一の測距値を選択し、また、測距位置を決定する。
(もっと読む)
追尾式レーザ干渉計
【課題】簡単な構成で、基準球支持部に対する各種配線、光ファイバ等の接触による張力や摩擦力による影響を無くして、高精度な測定を可能とする。
【解決手段】測定の基準を成す基準球10と、該基準球を支持する基準球支持部12と、前記基準球の周囲を2軸回転運動する、第一軸回転機構21及び第二軸回転機構22でなる回転機構部20と、該回転機構部に搭載されたレーザ干渉測長機30を有し、ターゲットとなる再帰的反射体(40)からの戻り光の情報に基づきターゲットを追尾して、基準球の中心座標を基準とし、回転機構部に載ったレーザ干渉測長機からの出射光と戻り光の光軸が平行となる再帰的反射体との距離を測定する追尾式レーザ干渉計において、装置の基部(14)に設置される第一軸回転機構21の内周部を中空とし、該中空に、前記基準球支持部12との隙間を介して筒状カバー60を設け、その外部に第二軸回転機構22への配線を通過させる。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11で得たプロファイルデータの複数の計測点データ間の境界点位置に、隣接する計測点データ同士が同一領域にあるか否かに応じた状態変数を定義することで、プロファイルデータの任意の領域分割状態を状態空間のうちの一状態として表現し、一状態における領域分割した計測点データ群を最小自乗近似して得た近似線からのばらつき及び類似する領域の連続性を加味した評価関数を用いて、状態空間の中から評価関数を最大とする領域分割状態をMCMCで求め、分割後の領域内の計測点データから幾何的特徴を評価することで、移動ロボットRの前方側を走行可能領域及び走行不能領域に区分けする。
(もっと読む)
方位測定方法及び方位測定装置
【課題】光の放射角を走査することなく、対象物の方位を高速度で検出する
【解決手段】所定波長帯域光を波長に依存して放射角が異なるように分散させて、放射する照射装置と、照射装置により放射された光の対象物からの反射光を受光する受光装置と、受光装置による受光結果から対象物の方位を決定する方位決定装置とを有する。また、照射装置は、スーパーコンティニュアム光を放射する装置である。パルス光を放射する時刻から、反射光の受光時までの遅延時間を測定し、遅延時間から対象物までの距離を測定する距離測定装置を有する。これにより光の放射角を走査することなく、一度に、3次元空間における対象物の座標を測定することができる。
(もっと読む)
効率が向上した測地スキャナ
【課題】本発明は、ターゲットの外観を決定する方法および測地スキャナを提供する。
【解決手続】本発明の方法および測地スキャナでは、初期スキャンが行われ、ターゲット(150)の表面における、多数の予め定めた位置(151〜166)のそれぞれについて、最適なゲイン値の組を算出または決定する。すべての予め定めた位置についてのゲイン値(g151〜g166)が決定されると、ゲイン値を用いて予め定めた位置のそれぞれとの距離が算出される。本発明は、測定速度および全体の効率が向上する点で、好都合である。  (もっと読む)
(もっと読む)
データセンタのラック内に設置されたコンピューティング機器への位置情報の提供
【課題】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供すること。
【解決手段】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供する方法、装置、および製品であって、投影モジュールによって、データセンタのラックの上の少なくとも1つの反射面上の複数の基準点に複数の光信号を投影することであって、各光信号は、基準点のうちの1つに対応し、その対応する基準点の基準点位置情報を符号化する、投影することと、ラックのうちの1つに取り付けられた位置検出モジュールによって、反射面から反射された光信号のうちの1つまたは複数を検出することと、位置検出モジュールによって、基準点位置情報に従ってラック位置情報を判定することと、位置検出モジュールによって、位置検出モジュールが取り付けられるラックの位置を識別するのにラック位置情報を使用する位置情報コンシューマにラック位置情報を提供することとを含む方法、装置、および製品を開示する。
(もっと読む)
光センサ
自己混合干渉を用いて光センサ(600)に対する対象の動きを検出する光センサ(600)を有するスイッチについて記載する。光センサ(600)はレーザ(100)、検出器(200)及びフィルタ装置(500)を有する。フィルタ装置(500)は、検出器(200)によって生成される測定信号を、その測定信号が所定閾値を下回る速度での対象の動きによって生じる場合に、抑制する。光センサ(600)は、対象の動きの速度に依存した選択的なスイッチングを可能にすることができる。  (もっと読む)
(もっと読む)
移動体配置計測システム及び移動体搭載システム
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 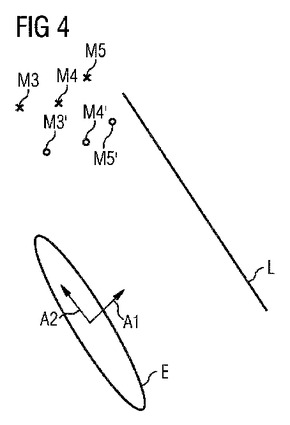 (もっと読む)
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
レーザースキャナのキャリブレーション装置及びキャリブレーション方法
【課題】特殊な機器を使用することなくレーザースキャナのキャリブレーションを行う技術を提供する。
【解決手段】左右両側辺が平行かつ垂直な垂直平面S1を有するターゲットを、垂直平面S1の前方の計測原点Omからレーザースキャナ1により水平走査し、M個の測点に対する点群データを得る。有効測点抽出部13は、この点群データの中から、垂直平面S1の左右両側の端部の端測点A,Bを特定し、端測点A,B間のm個の有効測点Piの相対座標を抽出する。座標決定手段14は、光軸の軌跡が垂直平面S1を切る線(走査線E1E2)を基準に測地座標系を設定し、端点E1から端測点Aまでの距離dA、端点E2から端測点Bまでの距離dB、及び端測点A,B以外の各有効測点Piから走査線E1E2までの距離diの自乗和が最小となるように、相対座標を前記測地座標へ関係づける関係パラメータを決定する。
(もっと読む)
計測装置および計測方法
【構成】 計測装置10はコンピュータ12を含み、コンピュータ12には複数のレーザーレンジファインダ14が接続される。複数のレーザーレンジファインダ14は、或る環境に配置され、コンピュータ12は、レーザーレンジファインダ14の検出結果に基づいて人を追跡する。たとえば、コンピュータ12は、パーティクルフィルタを用いて、人の位置および移動速度を推定し、胴体および両腕を3つの円で組み合わせた人形状モデルを用いて、人の身体の方向と腕の動きとを推定する。
【効果】 比較的少ない計算量で正確に人を追跡することができる。
(もっと読む)
移動ロボットの監視装置および監視方法
【課題】人と移動ロボットが同一エリアを移動する場合に、移動ロボットの大きさと速度が人と同じ程度である場合でも人と移動ロボットを確実に識別することができ、移動ロボットの安全機能が誤動作しても監視員なしで人の安全を確保することのできる移動ロボットの監視装置および監視方法を提供する。
【解決手段】移動ロボット1に取り付けられレーザ光を強く反射するリフレクタ12と、移動ロボットの移動エリアを3次元計測する3次元レーザレーダ14と、3次元レーザレーダによる計測結果から移動ロボットと人とを識別し、人と移動ロボットの相対距離が所定の閾値より小さいときに移動ロボットの動作を抑制するロボット抑制装置16とを備える。
(もっと読む)
車両の積荷重心高推定装置
【課題】車両の姿勢や走行状態によらず、荷室内の積荷全体の重心高さを推定することが可能な積荷重心高推定装置の提供。
【解決手段】荷室60を有する車両に搭載される積荷重心高推定装置であって、レーザレーダ61とECUとを有する。レーザレーダ61は、荷室60が区画する荷室空間65内の積荷68の外面位置を、荷室空間65における座標として複数箇所で検出する。ECUは、レーザレーダ61が検出した複数の座標を用いて、荷室空間65内の積荷68全体の重心高を算出する。
(もっと読む)
161 - 180 / 319
[ Back to top ]