
Fターム[5J084AA04]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 位置、座標 (319)
Fターム[5J084AA04]に分類される特許
301 - 319 / 319
車載用監視装置

【課題】 比較的簡素な構成を採用することにより、小型化や低価格化に対応でき、しかも、前走車両の有無や前走車両との距離などを確実に検出可能な車載用監視装置を提供すること。
【解決手段】 車載用監視装置1において、光走査機構4は、水平方向における入射位置によって水平方向における偏向方向が変化する凸レンズなどの投光用偏向素子5と、水平方向において投光用偏向素子5へのレーザ光Lの入射光軸L0と直交する方向に向けてのみ投光用偏向素子5が直線的に移動することを許容するガイド機構9と、投光用偏向素子5をガイド機構9によってガイドしながら往復移動させて投光用偏向素子5に対するレーザ光Lの入射位置を切り換える駆動機構6とを備えている。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
空間領域の監視装置
空間領域に関する監視装置(1)はアナモルフィック光学系(4)が対応付けられている受信器(2)を有する。さらに監視装置(1)は送信器(10)を有し、この送信器(10)はビームパルス束(11)を用いて受信器(2)に対応付けられている視野(8)を走査する。評価ユニット(12)において実施される短時間積分でのビーム伝播時間検出によって、視野(8)内のオブジェクトの距離画像を形成することができる。  (もっと読む)
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 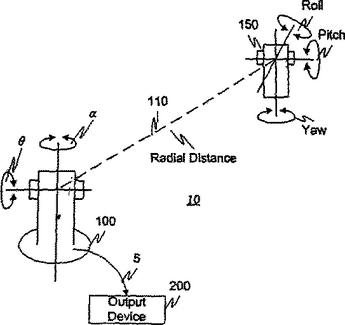 (もっと読む)
(もっと読む)
非接触型検出装置及び制御装置

【課題】 演算の負担が少なく、確実に検出対象の状態を検出することができる非接触型検出装置、及びその検出結果に基づいて好適な制御を行うことができる制御装置を提供すること。
【解決手段】 ステップ100では、高輝度の赤外線を照射する。ステップ110では、PINに受信信号S1が入力したかを判定する。ステップ130では、中程度の輝度の赤外線を照射する。ステップ140では、PINに受信信号S2が入力したか否かを判定する。ステップ160では、低輝度の赤外線を照射する。ステップ170では、PINに受信信号S3が入力したかを判定する。ステップ190では、メモリに記憶した受信信号の状態に応じて制御の内容を設定する。例えば受信信号S1、S2が記憶されている場合には、第2領域に手が進入したとみなしてドームランプ1を点灯し、受信信号S1〜S3が記憶されている場合には、第3領域に手が進入したとみなしてドームランプ1を点灯する制御を実施しない。
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
地形点から3次元整合される地表そのもののデジタル標高モデル抽出
多次元対象についての複数の視野を表す複数のフレームを表している複数の未加工の地形点から、デジタル標高モデルを抽出する方法(300)は:表面上方の妨害物により生成されたデータ点をフィルタリング除去することによって表面を探知し(304)、それにより表面を表す複数の表面データ点を提供し;且つ競争的フィルタを用いて表面データ点をフィルタリングし(306)、それによりデジタル標高モデルのデータ点の多次元表面シェルを提供する;ステップ又は作用を有する。上記方法はまた、専用の情報処理システム、又はプログラム可能な情報処理システム(200)によって実行されることが可能であり、あるいは例えばCD−ROM又はDVD等のコンピュータ可読媒体内の命令セットとして実行されることが可能である。 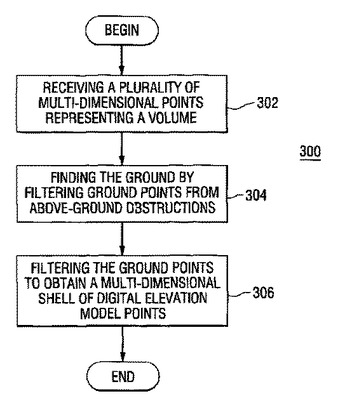 (もっと読む)
(もっと読む)
歩行者位置検出装置
【構成】 歩行者受信検出装置10は、歩行平面12と、それを挟んで設けられる2つのレーザスキャナ16aおよび16bを含み、歩行平面12上を歩行者が歩行するとき、レーザスキャナ16aおよび16bで歩行者の脚部の表面のデータ(位置データ)を取得する。コンピュータは、その位置データのたとえば単純平均を計算することによって、歩行者14の擬似重心位置を検出する。ただし、歩行平面12は2次元座標で規定されるものであるため、擬似重心位置も2次元座標で検出される。
【効果】 簡単に自由歩行する歩行者の位置を擬似重心として検出できる。
(もっと読む)
発熱物体の位置検出装置
【課題】発熱物体の位置検出の高精度化を実現することができるうえに、装置全体の簡略化及び小型化を図ることができる発熱物体の位置検出装置を提供する。
【解決手段】光送信部2と、発熱物体Aが発する赤外線IR及び発熱物体Aで反射した反射光LRを集光する集光レンズ3と、赤外線IR及び反射光LRを分光する分光手段4と、分光手段4を経た赤外線IRを検出する赤外線センサ5と、分光手段4を経た反射光LRを検出する光受信部6と、赤外線センサ5及び光受信部6からのデータに基づいて発熱物体Aまでの距離を測定する信号処理手段7を備えた位置検出装置とし、赤外線画像で捕捉した発熱物体Aの方位及び距離を検出する。
(もっと読む)
距離画像センサの較正方法
【課題】電磁波を用いた車載用距離センサの位置あわせに関して、少なくとも部分的な較正を高精度に行う方法を提供する。
【解決手段】少なくとも1つの走査エリアに沿って検出レンジを走査することが可能であり、かつ走査エリア又は距離画像センサの車両に対する位置合わせに関して対応する距離画像を検出することが可能であるような、車両上に取り付けられる電磁放射線用距離画像センサを少なくとも部分的に較正するための方法であって、上記距離画像センサと少なくとも1つの較正面上の領域との距離を前記距離画像センサによって求め、前記位置合わせを少なくとも部分的に記述するパラメータ(特にピッチ角である方向性)の値を求められた距離を使用して決定する方法。また、同時にビデオ画像の較正を距離センサの較正結果を考慮して行い、較正機能部の位置座標によって距離センサ検出結果のビデオカメラ上への画像化が行われる。
(もっと読む)
光センサ
光ビームが種々異なる方向に放射されて、場合によっては既存の対象で反射され、再度受信され、方向及び伝搬時間により、前記対象の3次元画像で評価されるセンサにおいて、光ビームの形成のために、光源が2次元マトリックスの形式で設けられている。 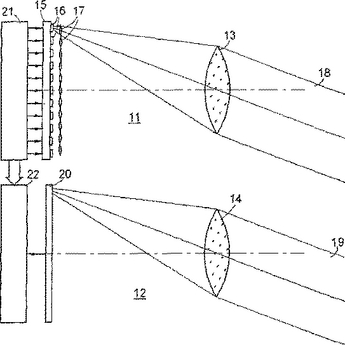 (もっと読む)
(もっと読む)
赤外線投光器、赤外線撮像装置、並びに車両
【課題】 レーザレーダを備えた車両等において、安価且つ低消費電力で赤外線映像を取得する。
【解決手段】 レーザ光を出射するレーザー発振器21と、レーザスキャン範囲Aでレーザ光を走査させる首振りアクチュエータ23と、物体で反射したレーザ光を受光する首振りアクチュエータ23と、レーザー発振器21から出射されたレーザ光を発散させて、レーザスキャン範囲A及び近赤外投光範囲Cを含む範囲に近赤外線を投光する近赤外投光用レンズ11と、物体で反射した近赤外線光を受光して赤外線映像を撮像する近赤外線カメラ4とを備え、ECU3により、物体を検出する場合には、レーザ光を走査させて受光したレーザ光に基づいて物体情報を算出し、赤外線映像を取得する場合には、近赤外線を投光させて赤外線映像を撮像させる。
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
ウインドウで覆われた逆反射器
例証的な実施形態は、任意の種類の開キューブコーナー逆反射器として実装することができ、球体に装着された逆反射器(SMR)はその一例である。計測学に基づく測定がなされる多くの工場環境において、機械加工その他の活動の結果、大量の微粒子物質が空中に放出される。この物質は、キューブコーナー(11)のガラス面を覆ったり、あるいはガラス面間の縁に集積する場合がある。充分な量の物質が堆積したならば、逆反射器に入射するレーザー光ビームを反射する力が減衰したり波面が歪む恐れがある。キューブコーナーのガラス面を洗浄することは可能である。しかし、洗浄が不適切であった場合、ガラス面にひっき傷が生じる恐れがある。ある場合には、隣接するガラス・パネルが会合する頂点に堆積する物質を洗浄することが困難な場合もある。本開示(bおよびc)は、逆反射器(33)の上に平面ガラス・ウインドウ(31)を被せることにより、これらの難点を軽減させるものである。平面ウインドウは最小限の労力で素早く洗浄することができ、損傷した場合には容易に交換可能である。これにより、逆反射器が清潔に保たれる可能性が増す。  (もっと読む)
(もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 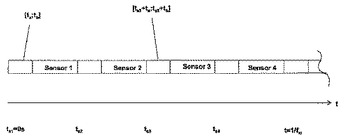 (もっと読む)
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 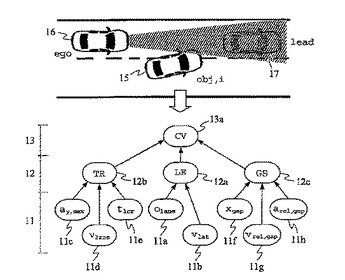 (もっと読む)
(もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 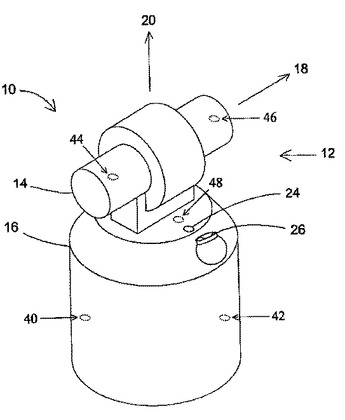 (もっと読む)
(もっと読む)
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 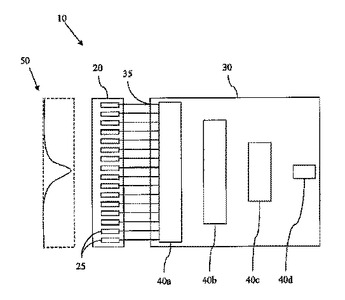 (もっと読む)
(もっと読む)
レーザー周辺認識システム
潜在的脅威を検知するために目標位置の周辺区域をレーザー走査する方法は、周辺区域を横切ってパルス化レーザービームを走査し、パルス化レーザービームからのエコーを受信しそしてシーン画像を形成するために複数の周辺区域走査を形成することよりなる。加えて、目標位置の周辺区域において検知された潜在的脅威を認証する方法は、潜在的脅威を検知し、無線で潜在的脅威に質問し、所定の時間間隔内で応答が送信されない場合、又は受信された応答が適正なアクセスコードを備えていない場合は、潜在的脅威は認証されないと宣言する。 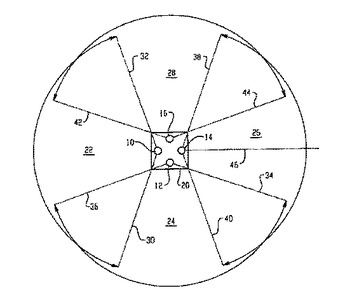 (もっと読む)
(もっと読む)
301 - 319 / 319
[ Back to top ]