
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。

【発明の詳細な説明】
【技術分野】
【0001】
発明の属する技術分野
本発明は、信号に対する少なくとも1つの送信機および少なくとも1つの受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。
【0002】
従来技術
レーダーセンサは車両技術で使用されており、車両から定置の障害物または運動する障害物(例えば歩行者)までの距離を例えば駐車の際などに監視し、車両のドライバーに対し相応の表示手段を介して光学的または音響的にこの距離を出力するために用いられる。ここでは自動車専用道路を高速走行している場合にも、また混雑した道路を低速走行している場合でも、先行交通者または後続交通者に対する距離が監視される。このため車両のフロント、リアおよび/または側方領域を監視する場合にはサイドに、当該分野の技術者には周知のレーダー装置の構成要素としてのレーダーセンサが配置される。レーダー装置は周知の走行支援システムの構成要素であることもある。
【0003】
パルス変調の行われるレーダーセンサは、周知のように、パルス発生器、送信アンテナを備えた送信機、受信アンテナを備えた受信機、および評価電子回路を有している。送信アンテナから出力されたレーダーパルスは目標物で反射され、受信アンテナを介して受信機へ戻ってくる。このレーダーパルスは受信機でパルス発生器からの基準信号と混合され、ローパスフィルタを介してフィルタリングされ、A/D変換後に評価電子回路によって評価される。このようにしてレーダーセンサひいては車両から目標物までの距離および目標物に対する相対速度が求められる。パルス変調に代えて、FMCW変調,PSK変調,ASK変調,FSK変調,PN符号(Pseudo Noise Code)変調などの他の変調法、またはこれらを組み合わせた手法を用いることもできる。
【0004】
車両に複数のレーダーセンサが設けられていると、第1のレーダーセンサから出力されたレーダー信号が目標物で反射され、他のレーダーセンサのアンテナによってクロスエコーとして受信されてしまう。このとき第1のレーダーセンサから出力されたレーダー信号の固有エコーに雑音または重畳が発生する。種々のセンサの信号を分離するには、独国出願第19703237号明細書から知られるように、レーダー信号をマイクロ波領域で変調し、このレーダー信号と固有エコー信号またはクロスエコー信号とを変調に基づいて対応づける。あるいは日本国出願第07012928号明細書またはR.C.Dixon: "Spread Spectrum Systems", 2.Aufl., Verlag Wiley&Sons, NewYork 1984から知られるように、いわゆるPN符号化を行って障害信号抑圧およびチャネル分離を達成することもできる。この場合には複数のレーダーセンサに対して異なる符号化を用いることにより、レーダーセンサの受信機で受信された他のレーダーセンサのクロスエコー信号の評価が可能となる。また、複数のレーダーセンサの分離に、相互に直交するレーダー信号用の符号を使用することもできる。さらに欧州特許第0864880号明細書からは、複数のレーダーセンサを交番的に駆動してこれらを分離し、ここで、固有エコー信号すなわち各レーダーセンサの送信機から出力された信号そのものと他のレーダーセンサのクロスエコー信号との双方を評価することが知られる。独国出願第19711467号明細書からはこれらの手法に比較しうる超音波センサを用いた手法が知られる。
【0005】
これらの手法の欠点として、種々のレーダーセンサの分離、すなわち受信された固有エコー信号およびクロスエコー信号の分離に大きな回路コストおよび制御技術コストが必要となることが挙げられる。レーダーパルスの変調によりレーダーセンサの出力が低下してしまうこともある。また、例えば欧州特許第0864880号明細書に記載されている交番駆動では、送信側で遮断されたレーダーセンサは遮断状態では固有エコーを受信できない。
【0006】
本発明の課題、解決手段および利点
本発明の基礎とする課題は、2つ以上のセンサを有する装置において、各センサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにすることである。
【0007】
この課題は請求項1に記載の特徴により解決される。
【0008】
本発明の核心となる着想は、複数のセンサを使用する際に、送信動作と受信動作とが時間的に連続して調整およびクロック制御され、各センサまたは各センサに属する受信機が所定の時間インターバル、すなわち送信信号に対する受信信号の遅延時間にわたってのみ固有エコー信号およびクロスエコー信号を受信および評価するということである。各時間インターバルは相互に交わらない。これは、送信信号の反復周波数fWの位相をそれぞれの送信機に適合するように異なって選定することにより達成される。ここで云う時間インターバルとは、所定の速度、特に光速cで運動する信号の伝搬時間の2倍に関する。
【0009】
驚くべきことに、本発明は、相応の2つ以上のレーダーセンサを有するレーダー装置、相応の2つ以上の光センサを有する光学装置、または相応の2つ以上の超音波センサを有する超音波装置にも適用可能である。
【0010】
有利な実施形態によれば、装置は相応の2つ以上のレーダーセンサを有するレーダー装置であり、各レーダーセンサは変調されたレーダー信号に対して少なくとも1つの送信機および少なくとも1つの受信機を有し、第1のレーダーセンサは他のレーダーセンサの交差エコー信号を受信することができる。本発明では、各レーダーセンサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に分離される。
【0011】
ここで本発明の解決手段では、複数のレーダーセンサを使用する際に、送信動作と受信動作とが時間的に連続して調整およびクロック制御され、各センサまたは各センサに属する受信機が所定の時間インターバル、すなわち送信信号に対する受信信号の遅延時間にわたってのみ固有エコー信号およびクロスエコー信号を受信および評価するということである。各時間インターバルは相互に交わらない。これは、送信信号の反復周波数fWの位相をそれぞれの送信機に適合するように異なって選定することにより達成される。ここで云う時間インターバルとは、所定の速度、特に光速cで運動する信号の伝搬時間の2倍に関する。
【0012】
したがって所定の遅延インターバルではつねに1個のレーダーセンサのみが送信機から送信され反射されたレーダー信号を受信することが保証される。全てのレーダーセンサが連続的にレーダー信号(例えばパルス、PN符号フレーム)を反復周波数fWで送信するが、欧州特許第0864880号明細書に記載されているような周期的な遮断は行わなくてよい。受信される種々のレーダーエコーの分離、すなわちクロスエコー信号と固有エコーとの分解は、レーダーパルスに対する通常の信号評価法および符号化法によって行うことができる。
【0013】
本発明はさらに、パルス変調に代えて、例えばPN符号で変調された搬送波信号(例えばPSK変調、ASK変調またはFSK変調により変調された信号)を用いるレーダー装置に適用することもできる。この場合、選択された符号に関係なく、本発明の着想にしたがって信号間の分離を達成することができる。このとき各レーダーセンサは、適切に時間オフセットされた符号フレームを反復周波数fWで周期的に反復しつつ同時に送信する。各レーダーセンサに対してそれぞれ異なる符号を用いる必要はない。
【0014】
本発明の利点は、種々のレーダーセンサからの信号どうしの分離が達成されることにある。また他のレーダーセンサから送信されたクロスエコー信号の評価も可能となる。これにより例えばレーダー信号を反射した目標物の外形が凸形であるか凹形であるか、またその広がりがどれだけであるかを求めることができる。さらに目標物の正確な三角測量または位置測定も可能であり、個々の反射を誤って割り当てることによる幻像の発生も回避することができる。
【0015】
本発明の有利な実施形態は従属請求項に記載されている。
【0016】
請求項2に示されているようなパルス反復周波数fWを有するパルスレーダー装置では、受信信号の重畳なく一義的に測定可能な目標最大距離に対して、パルス
Reind=c/(2fW) ここでcは媒体中の光速
が相当する。このとき反復周波数fWは、請求項3に示されているように、PNレーダーのPN符号フレームの反復周波数であってもよい。
【0017】
A.Ludloff: "Praxiswissen Radar und Radarsignalverarbeitung", 2.Aufl. Verlag Vieweg, Wiesbaden, 1998から公知のレーダーの式(Radargleichung)によれば、各レーダーセンサの最大到達範囲Rmaxは、目標からの反射信号が受信機に入る際の目標距離が距離Reindに相応し、受信されたレーダー信号が一義的に割り当て可能となるように調整される。したがって一義的な測定結果が得られない距離での目標物の測定は回避される。
【0018】
通常は、レーダーセンサによって監視される距離範囲は、レーダーセンサが直接近傍を検出できない場合、そのレーダーセンサの最小距離raから始まる。実際の監視範囲[ra,rb]は請求項4に示されているようなインターバル[0;Rmax]内に存在する。レーダーパルスが送信機から検出範囲内の目標物へ達し、そこから受信機へ戻ってくるまでの信号伝搬時間は、時間インターバル[2ra/c;2rb/c]または[ta;tb]内にあり、いずれにしても一義的な測定の可能な時間インターバル[0;1/fW]内に入っている。ここで、種々の距離範囲が監視される場合、n個のレーダーセンサのうちi番目のセンサの時間インターバルは相互に異なっている。
【0019】
レーダー装置において、請求項5に示されているような共働する複数のアクティブなレーダーセンサが使用され、これらが相互に分離される場合、個々のレーダーセンサの周期的な送信信号の遅延量tsiは、所定の空間的距離を監視する個々のレーダーセンサの受信信号の遅延時間が交わらず、これらを相互に分離できるように、前述の時間インターバル[0;1/fW]内で選択される。これにより遅延量tsiはn個のレーダーセンサの送信信号の反復周波数の1周期内で、式
tsi=(i−1)*c/(2Rmax) ここでi=1,2,...,n
にしたがって選択される。このときi番目のレーダーセンサは時間インターバル[tai;tbi]=[tsi+ta;tsi+tb]内で自身の固有エコー信号および他のレーダーセンサからのクロスエコー信号を受信する。
【0020】
特にPN符号化されたレーダー信号では、送信された符号フレームについて低い反復周波数fWを選択することができる。例えば10BitのPN符号、250MHzのビットクロック周波数またはチップクロック周波数で、符号フレームの反復周波数fW=244kHzが得られ、符号フレームの1周期の時間インターバル[0s;4μs]内でレーダーセンサによる一義的な距離測定が可能となる。これは一義的に測定可能な最大距離範囲Reind=614mに相応する。
【0021】
全てのレーダーセンサの最大到達範囲をRmax=200mに設定した場合、この実施例では3個のレーダーセンサまで相互に分離して動作させることができる。なぜなら固有エコーはインターバル[0m;Rmax]内で観察され、ここで他のレーダーセンサのクロスエコー信号は送信信号の符号遅延に相応する距離>Rmaxで現れるからである。このようにすればレーダーセンサ間の符号オフセットの時間同期が保証され、遅延時間は交わらない。したがって過度の精度は要求されない。
【0022】
1個のセンサによって他のn−1個のセンサ(i=2...n)のクロスエコー信号を検出するためには、個々のレーダーセンサまたはその送信機を相互に正確に同期し、請求項6に示されているように、センサで検出されたそれぞれの距離範囲が相応に正確にオフセットされた距離範囲[c/(2ts2...n)+ra;c/(2ts2...n)+rb]内に存在するようにしなければならない。この場合、個々のレーダーセンサの送信信号(レーダーパルスまたはPN符号化搬送波)の遅延時間はtsiとして定められ、他のレーダーセンサのクロスエコー信号は遅延時間tsiの定義された時間インターバル、ひいては各レーダーセンサの受信機で相応に現れる距離範囲にわたってのみ観察される。その際に相応のセンサの固有エコー信号の評価は変更されない。
【0023】
1個の固有エコー信号およびn−1個のクロスエコー信号の検出および評価は、請求項7に示されているように、レーダーセンサの複数の受信機において時間的に順次にまたは並列に行うことができる。順次の検出であれば別の受信機を設ける必要はない。また、2つの手法を組み合わせることもできる。これに相応する電子評価ユニットの構成は当該分野の技術者には明らかである。
【0024】
複数のレーダーセンサの前述の分離は、種々の利用分野における超音波センサなどの音響センサまたはLIDARセンサなどの光センサにも適用可能である。
【0025】
図面の簡単な説明
本発明の実施例を以下に図に則して詳細に説明する。図1にはパルスレーダー装置のブロック図が示されている。図2には複数のレーダーセンサが駆動されている場合の時間遅延インターバルを分割する手法の例が示されている。図3には複数の受信機を備えたパルスレーダー装置のブロック図が示されている。
【0026】
本発明の有利な実施例
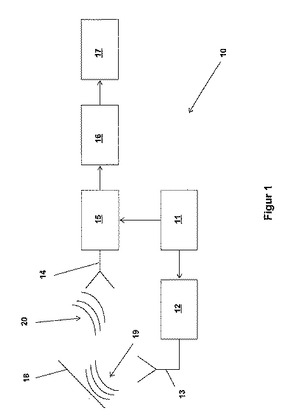
図1にはレーダーセンサを用いた周知のパルスレーダー装置10の概略図が示されている。レーダー装置10は主として、パルス発生器11,およびこれによってトリガされ、送信アンテナ13を介してレーダーパルス19を出力する送信機12から成る。レーダーパルス19は目標物18、例えば他車両、固定の障害物または歩行者などで反射し、受信アンテナ14からレーダー装置10の受信機15へ伝達される。受信信号20はパルス発生器11の基準信号と混合され、ローパスフィルタおよびA/D変換器16を介して評価ユニット17へ供給される。ここで基準信号は送信信号に対して時間的にオフセットされている。評価ユニット17では受信信号20、ひいては目標物18とレーダー装置10またはセンサの設けられている自車両との距離または相対速度が分析される。
【0027】
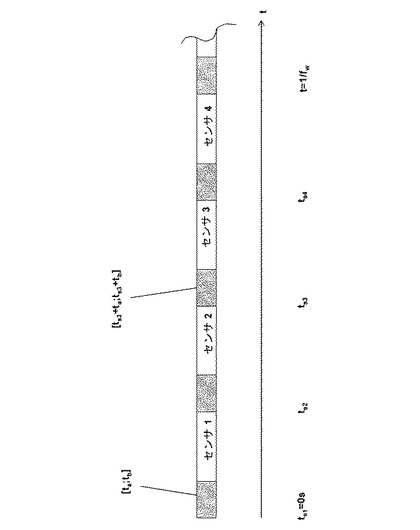
図2には、レーダー信号の遅延時間によって相互に分離されたn=4個のレーダーセンサの駆動モードが示されている。ここで時間特性t(矢印)はt=0sから始まっている。第1の時間インターバル[ta;tb]では4個のレーダーセンサのうち第1のレーダーセンサが自身の固有エコーを受信し、他のn−1個のレーダーセンサが第1のレーダーセンサから送信された信号のクロスエコーを受信する。第2の時間インターバル[ts3+ta;ts3+tb]では、第1のレーダーセンサが例えば第3のレーダーセンサのクロスエコー信号を受信する。各受信インターバル間の時間は、レーダーの式(Radargleichung)を考慮した固有エコーおよびクロスエコーの測定の一義性を保証するために必須である。全時間範囲1/fWで1周期が終了し、この過程が反復される。したがって連続送信している各レーダーセンサが送信モードと受信モードとで相互に時間遅延により分離され、1個の固有エコー信号および他の3個のクロスエコー信号を検出および処理することが保証される。このため望ましくない雑音または信号重畳は発生しない。
【0028】
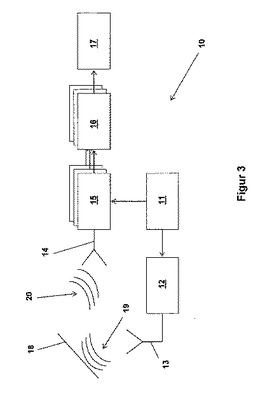
図3の実施例のパルスレーダー装置には3個の受信機15および相応の3個のローパスフィルタおよびA/D変換器16が設けられており、アンテナ14によって受信された1個の固有エコー信号および別のレーダーセンサからの2個のクロスエコー信号が受信および処理され、共通の評価ユニット17へ供給される。
【図面の簡単な説明】
【0029】
【図1】パルスレーダー装置のブロック図である。
【図2】時間遅延インターバルを分割する手法の例を示す図である。
【図3】複数の受信機を備えたパルスレーダー装置のブロック図である。
【技術分野】
【0001】
発明の属する技術分野
本発明は、信号に対する少なくとも1つの送信機および少なくとも1つの受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。
【0002】
従来技術
レーダーセンサは車両技術で使用されており、車両から定置の障害物または運動する障害物(例えば歩行者)までの距離を例えば駐車の際などに監視し、車両のドライバーに対し相応の表示手段を介して光学的または音響的にこの距離を出力するために用いられる。ここでは自動車専用道路を高速走行している場合にも、また混雑した道路を低速走行している場合でも、先行交通者または後続交通者に対する距離が監視される。このため車両のフロント、リアおよび/または側方領域を監視する場合にはサイドに、当該分野の技術者には周知のレーダー装置の構成要素としてのレーダーセンサが配置される。レーダー装置は周知の走行支援システムの構成要素であることもある。
【0003】
パルス変調の行われるレーダーセンサは、周知のように、パルス発生器、送信アンテナを備えた送信機、受信アンテナを備えた受信機、および評価電子回路を有している。送信アンテナから出力されたレーダーパルスは目標物で反射され、受信アンテナを介して受信機へ戻ってくる。このレーダーパルスは受信機でパルス発生器からの基準信号と混合され、ローパスフィルタを介してフィルタリングされ、A/D変換後に評価電子回路によって評価される。このようにしてレーダーセンサひいては車両から目標物までの距離および目標物に対する相対速度が求められる。パルス変調に代えて、FMCW変調,PSK変調,ASK変調,FSK変調,PN符号(Pseudo Noise Code)変調などの他の変調法、またはこれらを組み合わせた手法を用いることもできる。
【0004】
車両に複数のレーダーセンサが設けられていると、第1のレーダーセンサから出力されたレーダー信号が目標物で反射され、他のレーダーセンサのアンテナによってクロスエコーとして受信されてしまう。このとき第1のレーダーセンサから出力されたレーダー信号の固有エコーに雑音または重畳が発生する。種々のセンサの信号を分離するには、独国出願第19703237号明細書から知られるように、レーダー信号をマイクロ波領域で変調し、このレーダー信号と固有エコー信号またはクロスエコー信号とを変調に基づいて対応づける。あるいは日本国出願第07012928号明細書またはR.C.Dixon: "Spread Spectrum Systems", 2.Aufl., Verlag Wiley&Sons, NewYork 1984から知られるように、いわゆるPN符号化を行って障害信号抑圧およびチャネル分離を達成することもできる。この場合には複数のレーダーセンサに対して異なる符号化を用いることにより、レーダーセンサの受信機で受信された他のレーダーセンサのクロスエコー信号の評価が可能となる。また、複数のレーダーセンサの分離に、相互に直交するレーダー信号用の符号を使用することもできる。さらに欧州特許第0864880号明細書からは、複数のレーダーセンサを交番的に駆動してこれらを分離し、ここで、固有エコー信号すなわち各レーダーセンサの送信機から出力された信号そのものと他のレーダーセンサのクロスエコー信号との双方を評価することが知られる。独国出願第19711467号明細書からはこれらの手法に比較しうる超音波センサを用いた手法が知られる。
【0005】
これらの手法の欠点として、種々のレーダーセンサの分離、すなわち受信された固有エコー信号およびクロスエコー信号の分離に大きな回路コストおよび制御技術コストが必要となることが挙げられる。レーダーパルスの変調によりレーダーセンサの出力が低下してしまうこともある。また、例えば欧州特許第0864880号明細書に記載されている交番駆動では、送信側で遮断されたレーダーセンサは遮断状態では固有エコーを受信できない。
【0006】
本発明の課題、解決手段および利点
本発明の基礎とする課題は、2つ以上のセンサを有する装置において、各センサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにすることである。
【0007】
この課題は請求項1に記載の特徴により解決される。
【0008】
本発明の核心となる着想は、複数のセンサを使用する際に、送信動作と受信動作とが時間的に連続して調整およびクロック制御され、各センサまたは各センサに属する受信機が所定の時間インターバル、すなわち送信信号に対する受信信号の遅延時間にわたってのみ固有エコー信号およびクロスエコー信号を受信および評価するということである。各時間インターバルは相互に交わらない。これは、送信信号の反復周波数fWの位相をそれぞれの送信機に適合するように異なって選定することにより達成される。ここで云う時間インターバルとは、所定の速度、特に光速cで運動する信号の伝搬時間の2倍に関する。
【0009】
驚くべきことに、本発明は、相応の2つ以上のレーダーセンサを有するレーダー装置、相応の2つ以上の光センサを有する光学装置、または相応の2つ以上の超音波センサを有する超音波装置にも適用可能である。
【0010】
有利な実施形態によれば、装置は相応の2つ以上のレーダーセンサを有するレーダー装置であり、各レーダーセンサは変調されたレーダー信号に対して少なくとも1つの送信機および少なくとも1つの受信機を有し、第1のレーダーセンサは他のレーダーセンサの交差エコー信号を受信することができる。本発明では、各レーダーセンサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に分離される。
【0011】
ここで本発明の解決手段では、複数のレーダーセンサを使用する際に、送信動作と受信動作とが時間的に連続して調整およびクロック制御され、各センサまたは各センサに属する受信機が所定の時間インターバル、すなわち送信信号に対する受信信号の遅延時間にわたってのみ固有エコー信号およびクロスエコー信号を受信および評価するということである。各時間インターバルは相互に交わらない。これは、送信信号の反復周波数fWの位相をそれぞれの送信機に適合するように異なって選定することにより達成される。ここで云う時間インターバルとは、所定の速度、特に光速cで運動する信号の伝搬時間の2倍に関する。
【0012】
したがって所定の遅延インターバルではつねに1個のレーダーセンサのみが送信機から送信され反射されたレーダー信号を受信することが保証される。全てのレーダーセンサが連続的にレーダー信号(例えばパルス、PN符号フレーム)を反復周波数fWで送信するが、欧州特許第0864880号明細書に記載されているような周期的な遮断は行わなくてよい。受信される種々のレーダーエコーの分離、すなわちクロスエコー信号と固有エコーとの分解は、レーダーパルスに対する通常の信号評価法および符号化法によって行うことができる。
【0013】
本発明はさらに、パルス変調に代えて、例えばPN符号で変調された搬送波信号(例えばPSK変調、ASK変調またはFSK変調により変調された信号)を用いるレーダー装置に適用することもできる。この場合、選択された符号に関係なく、本発明の着想にしたがって信号間の分離を達成することができる。このとき各レーダーセンサは、適切に時間オフセットされた符号フレームを反復周波数fWで周期的に反復しつつ同時に送信する。各レーダーセンサに対してそれぞれ異なる符号を用いる必要はない。
【0014】
本発明の利点は、種々のレーダーセンサからの信号どうしの分離が達成されることにある。また他のレーダーセンサから送信されたクロスエコー信号の評価も可能となる。これにより例えばレーダー信号を反射した目標物の外形が凸形であるか凹形であるか、またその広がりがどれだけであるかを求めることができる。さらに目標物の正確な三角測量または位置測定も可能であり、個々の反射を誤って割り当てることによる幻像の発生も回避することができる。
【0015】
本発明の有利な実施形態は従属請求項に記載されている。
【0016】
請求項2に示されているようなパルス反復周波数fWを有するパルスレーダー装置では、受信信号の重畳なく一義的に測定可能な目標最大距離に対して、パルス
Reind=c/(2fW) ここでcは媒体中の光速
が相当する。このとき反復周波数fWは、請求項3に示されているように、PNレーダーのPN符号フレームの反復周波数であってもよい。
【0017】
A.Ludloff: "Praxiswissen Radar und Radarsignalverarbeitung", 2.Aufl. Verlag Vieweg, Wiesbaden, 1998から公知のレーダーの式(Radargleichung)によれば、各レーダーセンサの最大到達範囲Rmaxは、目標からの反射信号が受信機に入る際の目標距離が距離Reindに相応し、受信されたレーダー信号が一義的に割り当て可能となるように調整される。したがって一義的な測定結果が得られない距離での目標物の測定は回避される。
【0018】
通常は、レーダーセンサによって監視される距離範囲は、レーダーセンサが直接近傍を検出できない場合、そのレーダーセンサの最小距離raから始まる。実際の監視範囲[ra,rb]は請求項4に示されているようなインターバル[0;Rmax]内に存在する。レーダーパルスが送信機から検出範囲内の目標物へ達し、そこから受信機へ戻ってくるまでの信号伝搬時間は、時間インターバル[2ra/c;2rb/c]または[ta;tb]内にあり、いずれにしても一義的な測定の可能な時間インターバル[0;1/fW]内に入っている。ここで、種々の距離範囲が監視される場合、n個のレーダーセンサのうちi番目のセンサの時間インターバルは相互に異なっている。
【0019】
レーダー装置において、請求項5に示されているような共働する複数のアクティブなレーダーセンサが使用され、これらが相互に分離される場合、個々のレーダーセンサの周期的な送信信号の遅延量tsiは、所定の空間的距離を監視する個々のレーダーセンサの受信信号の遅延時間が交わらず、これらを相互に分離できるように、前述の時間インターバル[0;1/fW]内で選択される。これにより遅延量tsiはn個のレーダーセンサの送信信号の反復周波数の1周期内で、式
tsi=(i−1)*c/(2Rmax) ここでi=1,2,...,n
にしたがって選択される。このときi番目のレーダーセンサは時間インターバル[tai;tbi]=[tsi+ta;tsi+tb]内で自身の固有エコー信号および他のレーダーセンサからのクロスエコー信号を受信する。
【0020】
特にPN符号化されたレーダー信号では、送信された符号フレームについて低い反復周波数fWを選択することができる。例えば10BitのPN符号、250MHzのビットクロック周波数またはチップクロック周波数で、符号フレームの反復周波数fW=244kHzが得られ、符号フレームの1周期の時間インターバル[0s;4μs]内でレーダーセンサによる一義的な距離測定が可能となる。これは一義的に測定可能な最大距離範囲Reind=614mに相応する。
【0021】
全てのレーダーセンサの最大到達範囲をRmax=200mに設定した場合、この実施例では3個のレーダーセンサまで相互に分離して動作させることができる。なぜなら固有エコーはインターバル[0m;Rmax]内で観察され、ここで他のレーダーセンサのクロスエコー信号は送信信号の符号遅延に相応する距離>Rmaxで現れるからである。このようにすればレーダーセンサ間の符号オフセットの時間同期が保証され、遅延時間は交わらない。したがって過度の精度は要求されない。
【0022】
1個のセンサによって他のn−1個のセンサ(i=2...n)のクロスエコー信号を検出するためには、個々のレーダーセンサまたはその送信機を相互に正確に同期し、請求項6に示されているように、センサで検出されたそれぞれの距離範囲が相応に正確にオフセットされた距離範囲[c/(2ts2...n)+ra;c/(2ts2...n)+rb]内に存在するようにしなければならない。この場合、個々のレーダーセンサの送信信号(レーダーパルスまたはPN符号化搬送波)の遅延時間はtsiとして定められ、他のレーダーセンサのクロスエコー信号は遅延時間tsiの定義された時間インターバル、ひいては各レーダーセンサの受信機で相応に現れる距離範囲にわたってのみ観察される。その際に相応のセンサの固有エコー信号の評価は変更されない。
【0023】
1個の固有エコー信号およびn−1個のクロスエコー信号の検出および評価は、請求項7に示されているように、レーダーセンサの複数の受信機において時間的に順次にまたは並列に行うことができる。順次の検出であれば別の受信機を設ける必要はない。また、2つの手法を組み合わせることもできる。これに相応する電子評価ユニットの構成は当該分野の技術者には明らかである。
【0024】
複数のレーダーセンサの前述の分離は、種々の利用分野における超音波センサなどの音響センサまたはLIDARセンサなどの光センサにも適用可能である。
【0025】
図面の簡単な説明
本発明の実施例を以下に図に則して詳細に説明する。図1にはパルスレーダー装置のブロック図が示されている。図2には複数のレーダーセンサが駆動されている場合の時間遅延インターバルを分割する手法の例が示されている。図3には複数の受信機を備えたパルスレーダー装置のブロック図が示されている。
【0026】
本発明の有利な実施例
図1にはレーダーセンサを用いた周知のパルスレーダー装置10の概略図が示されている。レーダー装置10は主として、パルス発生器11,およびこれによってトリガされ、送信アンテナ13を介してレーダーパルス19を出力する送信機12から成る。レーダーパルス19は目標物18、例えば他車両、固定の障害物または歩行者などで反射し、受信アンテナ14からレーダー装置10の受信機15へ伝達される。受信信号20はパルス発生器11の基準信号と混合され、ローパスフィルタおよびA/D変換器16を介して評価ユニット17へ供給される。ここで基準信号は送信信号に対して時間的にオフセットされている。評価ユニット17では受信信号20、ひいては目標物18とレーダー装置10またはセンサの設けられている自車両との距離または相対速度が分析される。
【0027】
図2には、レーダー信号の遅延時間によって相互に分離されたn=4個のレーダーセンサの駆動モードが示されている。ここで時間特性t(矢印)はt=0sから始まっている。第1の時間インターバル[ta;tb]では4個のレーダーセンサのうち第1のレーダーセンサが自身の固有エコーを受信し、他のn−1個のレーダーセンサが第1のレーダーセンサから送信された信号のクロスエコーを受信する。第2の時間インターバル[ts3+ta;ts3+tb]では、第1のレーダーセンサが例えば第3のレーダーセンサのクロスエコー信号を受信する。各受信インターバル間の時間は、レーダーの式(Radargleichung)を考慮した固有エコーおよびクロスエコーの測定の一義性を保証するために必須である。全時間範囲1/fWで1周期が終了し、この過程が反復される。したがって連続送信している各レーダーセンサが送信モードと受信モードとで相互に時間遅延により分離され、1個の固有エコー信号および他の3個のクロスエコー信号を検出および処理することが保証される。このため望ましくない雑音または信号重畳は発生しない。
【0028】
図3の実施例のパルスレーダー装置には3個の受信機15および相応の3個のローパスフィルタおよびA/D変換器16が設けられており、アンテナ14によって受信された1個の固有エコー信号および別のレーダーセンサからの2個のクロスエコー信号が受信および処理され、共通の評価ユニット17へ供給される。
【図面の簡単な説明】
【0029】
【図1】パルスレーダー装置のブロック図である。
【図2】時間遅延インターバルを分割する手法の例を示す図である。
【図3】複数の受信機を備えたパルスレーダー装置のブロック図である。
【特許請求の範囲】
【請求項1】
信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、
2つ以上のセンサを有する装置において、
各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離されている
ことを特徴とする2つ以上のセンサを有する装置。
【請求項2】
相応の2つ以上のレーダーセンサを有するレーダー装置、相応の2つ以上の光センサを有する光学装置、または相応の2つ以上の超音波センサを有する超音波装置である、請求項1記載の装置。
【請求項3】
前記レーダーセンサはそれぞれ例えば低い反復周波数fWでパルス駆動される、請求項1または2記載のレーダー装置。
【請求項4】
レーダーセンサの送信信号としてASK変調,PSK変調,BPSK変調,FSK変調またはこれらの変調法とPN符号との組み合わせにより変調された搬送波信号が用いられる、請求項2または3記載のレーダー装置。
【請求項5】
レーダーセンサはインターバル[0m;Rmax]内の監視すべき各距離範囲[ra;rb]を監視し、ここで0m≦ra≦rb≦Rmaxである、請求項3または4記載のレーダー装置。
【請求項6】
n個のレーダーセンサが同時に中断なく相応に変調された送信信号(パルス,PN-BPSK)を送信する、請求項3から5までのいずれか1項記載のレーダー装置。
【請求項7】
第1のレーダーセンサによって距離範囲[c/(2ts2...n)+ra;c/(2ts2...n)+rb]内のn−1個の別のレーダーセンサのクロスエコー信号が受信される、請求項2から6までのいずれか1項記載のレーダー装置。
【請求項8】
1つのレーダーセンサにおいて1個の固有エコー信号およびn−1個のクロスエコー信号の評価が並列および/または順次に行われ、例えば並列評価の場合には複数の受信機(15)が設けられる、請求項2から7までのいずれか1項記載のレーダー装置。
【請求項1】
信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、
2つ以上のセンサを有する装置において、
各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離されている
ことを特徴とする2つ以上のセンサを有する装置。
【請求項2】
相応の2つ以上のレーダーセンサを有するレーダー装置、相応の2つ以上の光センサを有する光学装置、または相応の2つ以上の超音波センサを有する超音波装置である、請求項1記載の装置。
【請求項3】
前記レーダーセンサはそれぞれ例えば低い反復周波数fWでパルス駆動される、請求項1または2記載のレーダー装置。
【請求項4】
レーダーセンサの送信信号としてASK変調,PSK変調,BPSK変調,FSK変調またはこれらの変調法とPN符号との組み合わせにより変調された搬送波信号が用いられる、請求項2または3記載のレーダー装置。
【請求項5】
レーダーセンサはインターバル[0m;Rmax]内の監視すべき各距離範囲[ra;rb]を監視し、ここで0m≦ra≦rb≦Rmaxである、請求項3または4記載のレーダー装置。
【請求項6】
n個のレーダーセンサが同時に中断なく相応に変調された送信信号(パルス,PN-BPSK)を送信する、請求項3から5までのいずれか1項記載のレーダー装置。
【請求項7】
第1のレーダーセンサによって距離範囲[c/(2ts2...n)+ra;c/(2ts2...n)+rb]内のn−1個の別のレーダーセンサのクロスエコー信号が受信される、請求項2から6までのいずれか1項記載のレーダー装置。
【請求項8】
1つのレーダーセンサにおいて1個の固有エコー信号およびn−1個のクロスエコー信号の評価が並列および/または順次に行われ、例えば並列評価の場合には複数の受信機(15)が設けられる、請求項2から7までのいずれか1項記載のレーダー装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2007−514945(P2007−514945A)
【公表日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2006−544403(P2006−544403)
【出願日】平成16年11月8日(2004.11.8)
【国際出願番号】PCT/EP2004/052848
【国際公開番号】WO2005/062071
【国際公開日】平成17年7月7日(2005.7.7)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公表日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成16年11月8日(2004.11.8)
【国際出願番号】PCT/EP2004/052848
【国際公開番号】WO2005/062071
【国際公開日】平成17年7月7日(2005.7.7)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]