
Fターム[5J083AD08]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 速度 (104)
Fターム[5J083AD08]の下位に属するFターム
Fターム[5J083AD08]に分類される特許
1 - 20 / 54
絶対速度推定装置
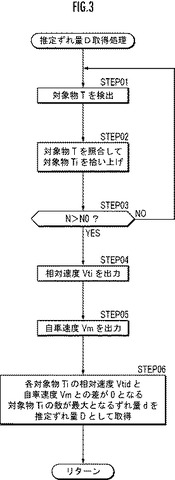
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム

【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】フーリエ変換によるピークパワースペクトル検出において、測定対象とする時間範囲の分解能を高めつつ、周波数分解能を高める。
【解決手段】時間変化する信号における所望の時間幅の範囲内でのピークパワー周波数を検出する方法は、信号を所望の時間幅内においてサンプリングしてデジタルデータ列とするサンプリング段階と、必要とされる周波数分解能を満たすために高速フーリエ変換において必要なサンプル数を基準サンプル数として、基準サンプル数に達するように、デジタルデータ列にゼロデータを付加する付加段階と、ゼロデータが付加されたデジタルデータ列に対して高速フーリエ変換を行うFFT段階と、を有する。高速フーリエ変換の結果において最大値を示す周波数をピークパワー周波数として検出する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法
【課題】本発明は、検出対象物体を容易にかつ精度よく検出するための相関処理に基づくドップラーレーダー送信装置を提供することを目的とする。
【解決手段】本発明は、ドップラーレーダー受信装置において自己相関が算出される検出対象物体からの反射波及び予め定められた参照波の周波数スペクトルが同一となるように、検出対象物体の移動速度のうち検出対象となる移動速度、自己の移動速度及びレーダー波の伝搬速度に基づいて、送信波の周波数スペクトルを調整する可変周波数発振部414及び読み出しアドレス生成部415と、送信波を検出対象物体に照射する送信波照射部と、を備えることを特徴とするドップラーレーダー送信装置である。
(もっと読む)
フェーズドアレイ型ドップラーソーダーシステム
【課題】上空の任意の位置での風向・風速値を十分な空間分解能と精度で得ることができるドップラーソーダーシステムを提供する。
【解決手段】1か所に設けられて上空に音響ビームを放射し散乱波を受信する送受波器と、送受波器の設置場所とは異なる2か所以上に設けられ散乱波を受信する受波器とを有するバイスタティック方式のドップラーソーダーシステムにおいて、送受波器及び各受波器として、いずれも複数の音響素子が配列されたフェーズドアレイ型のものを使用する。フェーズドアレイ型の送受波器及び受波器において音響ビームの放射方向を制御し、散乱波を受信する際に受信すべき散乱波の入来方法を制御することによって、散乱波でのドップラーシフト成分に基づき、上空の任意の測定位置での風向・風速値を算出する。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
自動車の安全装置および自動車
【課題】通行人や二輪車が、側後方の安全確認がなされずに開けられてしまった自動車の側部ドアと衝突する事故を未然に防止するとともに使い勝手のよい安全装置を提供すること。
【解決手段】自動車が停車中で側部ドアが閉状態であり、自動車の側後方の物体が自動車に到達するまでの到達予想時間が予め定められた所定の値以下の場合に音または表示により注意喚起を行う注意喚起モードと、注意喚起モード中に、すべての側部ドアが閉じられており、すべての側部ドアそれぞれのドアロックスイッチがロック側にある場合に移行するモードであって、物体側の側部ドアのドアロックスイッチがロック解除側へ操作されると操作されたドアロックスイッチをロック側へ戻す制御を行うドアロック制御モードとを有することを特徴とする自動車の安全装置などにより、この課題を解決する。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】方法はアンテナを形成する5以上の間隔をあけた音響センサにより、衝撃波単独信号を計測し、かつタイミングエラー分布を推定し、単独信号から、センサ対に到着する時間差を、信頼度に基づいて決定することにより、飛翔体軌跡を得る。
(もっと読む)
水中目標物探索システム、水中目標物探索方法及び水中目標物探索用プログラム
【課題】水中目標物探索システムの回路規模を削減して相関信号処理の負荷を軽減する。
【解決手段】送波装置10の励振信号生成手段12は、周波数が直線的に変化する第1励振信号を生成する低ドップラー感度励振信号生成部12Aと、周波数が非直線的に変化する第2励振信号を生成する高ドップラー感度励振信号生成部12Bと、第2励振信号を順次変調して周波数範囲が異なる複数の第2励振信号を生成するドップラー変調処理部12Cと、第1励振信号に複数の励振信号を付加して励振用合成信号を生成するパルス列生成部12Eと、を備える構成にした。送波装置10の送波手段11は、励振用合成信号に応じた音波を目標物30に向けて発信する。目標物30からの反射波は、受波装置に受信される受信信号と単一周波数レプリカ信号との相関信号処理によって受信信号に含まれるエコー信号が検出される。
(もっと読む)
水中探知装置及び水中探知画像表示方法
【課題】魚単体の遊泳状況を観測容易にする。
【解決手段】水中探知装置は、水中に送波され、魚で反射した受信信号から単体魚及びその位置を周期的に検出する検出手段(5,6)と、周期的に検出された単体魚及びその位置の情報から、同一の単体魚を関連付ける連結処理部71と、検出された単体魚の受信信号から魚体長を算出する魚体長算出部75と、単体魚の遊泳ベクトルを算出する遊泳ベクトル算出部72と、連結された単体魚について、魚体長に対応した計量マーク92a、及び当該単体魚の遊泳ベクトルに対応した変位マーク92bを対応付け、表示部9に表示される2次元座標上の当該単体魚の検出位置に表示する表示制御部8とを備える。
(もっと読む)
入力装置及び電子機器
【課題】比較的近距離に存在する比較的小さな検出対象の3次元的な位置、形状、速度を正確に検出することができ、検出対象の検出結果に対応した入力を行うことができる入力装置と、その入力装置を備えた電子機器を提供する。
【解決手段】超音波を発信して反射された超音波を受信する超音波センサーユニット1Aを備え、超音波センサーユニット1Aから発信された超音波と、検出対象により反射され超音波センサーユニット1Aにより受信された超音波と、に基づいて検出対象の位置、形状及び速度を算出する制御演算部を備え、超音波センサーユニット1Aは、複数の開口部11aが形成された基部11と、基部11に設けられ開口部11aを閉塞する振動板と、開口部11aの各々に対応して振動板に設けられた圧電体と、を有することを特徴とする。
(もっと読む)
移動体検出装置
【課題】回路規模の増大を抑えつつ監視空間の拡大が図れる移動体検出装置を提供する。
【解決手段】複数の送波器3を備えているので、従来では死角となっていた場所(例えば、ワンボックスタイプの自動車における3列目の座席周辺)にも連続エネルギ波(超音波)を行き渡らせることができるために監視空間の拡大が図れる。しかも、送波器3と受波器4の組を複数組備える場合と比較して、受波器4から出力する受波信号を処理する回路(位相検波回路6A,6Bやローパスフィルタ7A,7B、コンパレータ9A,9Bなど)を増やす必要がないために回路規模の増大を抑えることができる。
(もっと読む)
様々な範囲にある物体の位置推定
初期信号(20)を与え、時間シフト関数を初期信号(20)へ適用して送信信号(36)を生成し、送信信号(36)を送信し、受信信号を受信し、受信信号が初期信号によって生成されたかのように、受信信号からインパルス応答を計算し、インパルス応答を使用して、異なる距離範囲にある物体(6)からの反射による受信信号を弁別することによって、伝送路のインパルス応答を推定する。 (もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法が開示される。従来のベアリング−オンリートラッキングのためのパーティクル・フィルタリング・アルゴリズムを3次元空間で直接的に確張する代わりに、本発明は、3次元パーティクルフィルターを多様でなおかつ簡単な2次元パーティクルフィルターに再構成する。2次元パーティクルフィルターに対する再構成及び選択は、ノイズ環境での音響センサーの特性に基づく。本発明は、多重パーティクルフィルター結合で拡張されるが、本発明の剛健さと性能は、ラオの理論限界(Cramer−Rao Lower Bound:CRLB)を使って証明されうる。本発明は、計算の複雑性を減少させながらも、正確な3次元客体追跡を行うことができる長所がある。 (もっと読む)
周辺監視装置
【課題】より正確な車両周囲の情報を提供できる周辺監視装置を得る。
【解決手段】車両に搭載され、物体からの反射波を検出する超音波センサ5からの出力信号に基づいて、車両周辺の物体を検出する。超音波センサ5からの出力信号の電圧の時間経過の変動に基づく物体が移動体か否かの判断に先立って、超音波センサ5からの出力信号に基づいて物体までの距離を設定時間毎に算出し、距離の変動から物体が移動体か否かを判断する(S110)。物体が移動していないと判断したときに、同じ物体に基づく超音波センサ5からの出力信号の電圧に時間経過で変動があるとき、物体を移動体と判断する。例えば、時間経過による出力信号のピーク電圧差をゆらぎ量として算出し、ゆらぎ量が予め設定されたしきい値より大きいときに、物体を移動体と判断する(S120)。物体を移動体と判断したとき、判断結果を送信する(S130)。
(もっと読む)
目標運動解析方法及び装置
【課題】目標体の運動モデルを等速直進運動とすると、目標体が変針変速することにより、変針変速前後の目標の運動を正しく解析できないという問題があった。
【解決手段】本発明の目標運動解析方法は、目標体の変針変速を検出した上で、時系列観測データを用いて変針変速時刻を推定し、さらに時系列観測データを用いて、基準時刻における目標体位置座標及び、推定した変針変速時刻前後の等速直進区間毎の目標体の針路、速力を推定パラメータとする非線形最適化問題を解くことである。
(もっと読む)
1 - 20 / 54
[ Back to top ]