
Fターム[5J084AB03]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 航空機 (26)
Fターム[5J084AB03]に分類される特許
1 - 20 / 26
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
飛行機の識別及びドッキング誘導装置

【課題】飛行機のドッキング中の事故を防止し得るように飛行機の検出を改良すること。
【解決手段】ゲートに近づきつつある飛行機(12)を特定するために、レーザー距離計(LRF)(20)が使用される。LRF(20)は飛行機(12)に向けられており、エコーから輪郭を得て、公知の輪郭と比較される。類似した輪郭を有する飛行機(12)から区別するために、LRFは、エンジンのような構造があると予想される容積及びエンジンがないと予想される別の容積に向けられる。これらの2つの容積からのエコーは、エンジンが予期した場所にあるか否かを決定するために使用される。エンジンがある場合には、飛行機(12)は正しい機種のものであるとして特定され且つゲート(16)に入ることを許容される。そうでない場合には、飛行機(12)は止められる。機首の高さは、更に別の特定のための判定基準として使用することができる。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
電波・光波探知装置
【課題】この発明は、簡易な構成で、且つ、電波及び光波の双方の高精度な検知を実現して、探知性能の向上を図り得るようにすることにある。
【解決手段】二軸回りに回動自在に配したジンバル枠10の開口に電波検知系を形成するアンテナ12及び光波検知系を形成するリング状光学系11を同軸的に設けて、アンテナ12の背面側にリング状光学系11で取込んだ光波を集光する光学系17と共に、第1及び第2の光波検知器18,19を配し、電波及び光波の双方を検知するように構成したものである。
(もっと読む)
レーザー照射装置
【課題】 従来、電波センサーでは低高度を接近する目標を捕捉することが難しく、光学センサーでは遠距離の脅威を捕捉することが難しいため、低高度及び超音速で接近してくる目標を遠距離で対処することができないという問題があった。
【解決手段】 高出力連続波レーザー光をパルス変換器によってパルス化し、レーザー放射器から遠方より接近する目標に対してパルス化されたレーザー光を照射して、反射レーザー光を光学センサーで受信する。この受信信号の解析情報を元にレーザー放射器を駆動して目標を追尾し、目標が所定距離に接近した際にパルス動作を停止して、追尾目標に対し高出力連続波レーザ光を照射することにより、低高度目標に対して遠距離で対処することができる。
(もっと読む)
光波レーダ装置
【課題】コヒーレントドップラーライダ技術による光波レーダ装置において、高精度な速度および距離の計測を可能にした装置を提供する。
【解決手段】光ファイバコリメータ光学系12からの受信光と基準レーザ光源部1からの局部発振光の合波光から得られるビート信号の周波数成分を解析して対象物の速度を検出する第1信号処理部(16,17)と、送信光を伝送する光ファイバ伝送路において発生し後方へと伝搬する誘導ブリルアン散乱光を送信光から分離する分離用光路切り替え部(7)と、分離された誘導ブリルアン散乱光を送信光へ結合させるための第2光路合成部(11)と、光ファイバコリメータ光学系12から送受信された誘導ブリルアン散乱光により、パルス光の往復時間から対象物までの距離を検出する第2信号処理部(18,19)と、備えた。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、システムを較正すべく、投射光パルスを既知の角度方向にかつ既知の距離に配置された較正要素に指向させる手段(26)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
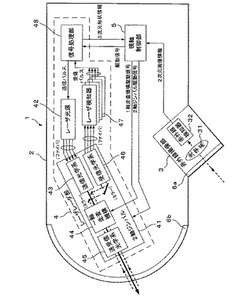
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 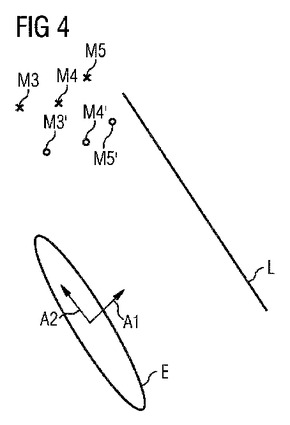 (もっと読む)
(もっと読む)
視野切替部及び赤外線誘導装置
【課題】小さいスペースで迅速かつ高精度に複数の視野を切り替えることができる視野切替部、及び、該視野切替部を備える小型かつ高性能な赤外線誘導装置の提供。
【解決手段】検知器に入射赤外線を集光する集光光学系3に視野切替部5を設け、視野切替部5を、光軸(高視野光軸15a及び狭視野光軸16a)が一点で交差するように配置された複数の視野のレンズ群(高視野用レンズ15及び狭視野用レンズ16)と、これらを支持する支持体17とで構成し、支持体17に、複数の光軸が交差する点を通り複数の光軸を含む面に直交する方向に延びる回転軸18を設け、視野切替部5を回転軸18を中心に回転させることによって集光光学系3を構成するレンズ群を切り替えて、複数の視野の切り替えを可能にする。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ターゲットとの距離に応じた受信レベルの変化に幅広く対応して、必要なダイナミックレンジを確保するとともに、機械的な可動部による信頼性の低下を回避する。
【解決手段】レーザダイオード2から出力されるパルスレーザ光をターゲットに向けて送信するとともに、ターゲットに反射したパルスレーザ光を、受信光の波長を選択するバンドパスフィルタ4を介して受信し、送受信したパルスレーザ光の回帰時間測定に基づいて、ターゲットとの距離を測定するレーザ測距装置1又はレーザ測距方法において、レーザダイオード2の加温や冷却に基づいて、レーザダイオード2から出力されるパルスレーザ光の波長を変更し、レーザダイオード2から出力されるパルスレーザ光の波長を、バンドパスフィルタ4の透過中心波長に対してシフトさせることにより、ターゲットに反射したパルスレーザ光の受信レベルを制御する。
(もっと読む)
LIDAR用ブロック光学要素構成
【課題】光検出及び測距(LIDAR)システムのための送受信機として使用されるブロック光学要素構成を提供する。
【解決手段】内部に複数の光路を形成するようにブロックとして互いに位置合わせされ、該位置合わせを維持するように互いに固定された複数のガラスモジュールと、ブロックに固定され、コヒーレント光ビームをブロックの出口点に導くブロック内の少なくとも1つの光路上にコヒーレント光ビームを生成するコリメート光源と、ブロックに固定された光検出器と、を備え、ブロックは、反射コヒーレント光ビームを受け取り、ブロック内に形成された少なくとも1つの別の光路を通じて該反射コヒーレント光ビームを光検出器へ伝えるように構成される。
(もっと読む)
距離撮像
【課題】多数の距離画素を用いて距離像を撮像する。
【解決手段】撮像されるべき各々の距離像のためにアレイ配置された複数の送信器を使用して電磁波がそれぞれ送信パルスの形で送信され、反射されたエコーパルスはアレイ配置された複数の受信器を使用して検出され、前記送信パルスが反射されて距離画素を形成する物体のそれぞれの距離は前記パルス飛行時間の算出によって測定され、撮像されるべき各々の距離像のために前記受信アレイの後に接続された時間測定器を使用して複数の個別測定が実施される。
(もっと読む)
ターゲット捕捉装置
【課題】ターゲットに対する捕捉性能の向上と共に、飛翔体に設置するに好適するターゲット捕捉装置を提供すること。
【解決手段】ターゲット捕捉装置30は、アジマス方向回動軸受33および赤外レーザ光生成手段32aを備えた基台32と、この基台32のアジマス方向回動軸受33に軸支されるターゲット捕捉装置本体31とを具備する。ターゲット捕捉装置本体31は、ターゲット側から受信する赤外レーザ光bにてターゲットの測距を行うターゲット照準装置35と、当該ターゲット照準装置35を軸支するエレベーション方向回動軸受37とを備え、ターゲット照準装置35は、微動鏡41および反射光受信器40を有する微動鏡装置42とターゲットへ照準を合わせる照準方向微調整基台45とを備える。基台32側とターゲット捕捉装置本体31との間には、基台32側の赤外レーザ光生成手段32aにて生成された赤外レーザ光bをターゲット捕捉装置本体31側に導光する赤外導光路qを備える。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
IR/レーザ共用光学系装置
【課題】IR撮像用装置及びレーザ測距装置の受信光学系を共用する共用光学系装置において、IR光とレーザ光を分離させるために分離板を用いることは、部品点数が多くなるため構造が複雑で装置が大型となり、装置の価格が高価となる。
【解決手段】IR光とレーザ光を分離して受光するIR/レーザ共用光学系装置において、IR光とレーザ光を透過集光するIR/レーザ共用レンズと、IR/レーザ共用レンズで透過集光されたIR光またはレーザ光のうちのいずれか一方を透過し他方を反射させる透過反射レンズと、透過反射レンズを透過したIR光またはレーザ光のうちのいずれか一方を受光するため、IR/レーザ共用レンズと透過反射レンズの光軸に対しオフセットした位置に設置する第1の受光素子と、透過反射レンズを反射したIR光またはレーザ光のうちのいずれか他方を受光する第2の受光素子とを備えるIR/レーザ共用光学系装置。
(もっと読む)
伝播時間測定装置における測定速度の増大
【課題】 測定速度を増大することが可能な面までの距離を測定するための装置を提供する。
【解決手段】 装置は、以前に送信した光パルス120の反射を受信する前に少なくとも一つの次の光パルス125を送信する。従って、複数の光パルスが所定の時刻に伝播中である。実施形態は、地勢図作成、深浅測量、地震学、障害検出、バイオマス測定、風速測定、温度計算、交通速度測定、軍事目標識別、地対空距離測定、高精細空間測量、狭域写真測量技術、大気組成、気象学、距離測定、及び数多くの他の用途に適用可能である。このような装置の例は、光検出及び測距(LIDAR)システム及びレーザー走査器のようなレーザー測距システムを含む。装置からデータ処理ユニットにより受信されるデータは、点群、デジタル面模型或いは面、地勢、及び/又は物体を記述するデジタル地勢模型のようなデータ模型を作成するために利用され得る。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するためのシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
航空機ドック入れシステムならびにエプロンの自動検査および霧または雪の検出を伴う方法
【課題】エプロンにある物体の検出を可能にし、ゲートまで前進することが安全であるか、それとも衝突の危険があるかに関してパイロットの判断を支援し、さらに、霧および雪の正確な検出を可能にする航空機検出システムの提供。
【解決手段】離れた物体の形状を得るためのレーザパルスを用いて航空機を検出し、識別し、かつドック入れするためのシステムはまず、物体を見つけて識別するまでゲートの前方の領域を走査する。物体が識別されたら、システムは物体を追跡する。システムはまた、物体の近くのエプロンの領域を監視し、地上補修車両などの障害物を検出する。システムはまた、レーザパルスを分析して、それらのパルスが固体の物体から反射されたのか、または霧もしくはその他の結露もしくは降水から反射されたのかを判定し、結露または降水を固体の物体と誤って識別するのを回避する。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
1 - 20 / 26
[ Back to top ]