
Fターム[5J084AB20]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | その他 (39)
Fターム[5J084AB20]に分類される特許
1 - 20 / 39
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
熱源位置角度検出方法

【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
窃盗防止装置並びに不正な干渉及び侵入の認識方法
【課題】販売員の防護領域への進入、退出並びに通常の店舗業務を許可する一方、窃盗を阻止する。
【解決手段】通路領域106以外の箇所で干渉又は乗り越えが可能であるような仕切り102により囲まれた防護領域104、特にレジの領域又は販売領域への不正な干渉又は侵入を認識するための窃盗防止装置108、110であって、該装置108、110はレーザスキャナ108を含み、該レーザスキャナ108は、その監視平面114により仕切り102越しの干渉及び乗り越えが認識されるようにその配置及び方向が決められ、その干渉又は乗り越えの認識に基づいて窃盗信号を出力する、という構成の装置において、通路領域106のための認証ユニット110を備え、該認証ユニット110は、通路領域106において正当に認められた通行があった場合にレーザスキャナ108を動作状態又は停止状態にするように構成されている。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
道路形状認識装置
【課題】自車両が走行する道路の形状を認識する道路形状認識装置において、地図情報を用いることのない簡素な構成で道路形状を認識できるようにする。
【解決手段】認識システムにおいては、道路形状認識装置にて、電磁波を自車両の進行方向に照射した反射波を受信することによって道路端部の候補となる複数の検出点の検出結果を取得する(S220)。そして、自車両からの距離が所定値以上である複数の検出点についての近似曲線を検出し(S120〜S150)、自車両からの距離が所定値未満である複数の検出点についての近似曲線を検出する。続いて、検出された各近似曲線を接続することによって道路形状を特定する(S160)。
(もっと読む)
レーザデータのフィルタリング方法及び装置
【課題】信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。
【解決手段】上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・を対象とし、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出する。
(もっと読む)
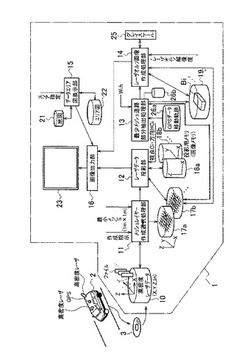
積雪深計測システム
【課題】本発明は、高い精度で計測でき且つ安全性の向上が図られ、積雪深の測定
結果を階的に警報出力できるものである。
【解決手段】
本発明は図1に示すように、積雪の表面に向けたスキャナより、レーザ光線を発光
させ、扇状に往復走査し、雪による反射光がスキャナに戻り受光するまでの位相差を
検出して距離を測定し、その距離データを送信するセンサー部と、前記センサー
部から受信した距離データを積雪深データに変える演算手段と、積雪深データを
出力する機能と、予め積雪深データの設定値を信号出力する機能を持つ処理部
からなる積雪深計測システム。
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 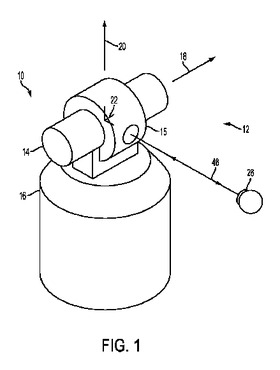 (もっと読む)
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
追尾式レーザ干渉測長計
【課題】入射面のゴミの影響を受け難く、基準球の表面の傷に対してロバストであり、基準球の局所的な真球誤差の影響を受け難くする。
【解決手段】固定位置に配設された透明な基準球614と、移動体に配設された再帰逆反射体(620)と、基準球の中心を中心として回動するように設計されたキャリッジ630と、キャリッジに固定配設され、再帰逆反射体と基準球の間でレーザビーム(642)を往復させる光学系を含み、再帰逆反射体と基準球の間の距離を干渉測長する測長手段(640)と、キャリッジに固定配設され、再帰逆反射体の入射光と反射光の光軸のずれ量に応じた信号を出力する追尾用位置検出手段660と、光軸のずれ量がゼロとなるようにキャリッジの回動を制御する制御部670とを備えた追尾式レーザ干渉測長計において、基準球に入射されるレーザビームが、基準球の中心Oに焦点を結び、入射側と反対の内側球面で反射されるようにする。
(もっと読む)
レーザ距離測定装置
【課題】検出エリアを設定する際の複雑なデータ入力作業等を極力省略するができ、検出エリアをより簡易に設定可能なレーザ距離測定装置を提供する。
【解決手段】レーザ距離測定装置1は、装置本体2と、この装置本体2とは別体として構成された基準物体80とを備えている。基準物体80は、レーザ光が入射したときに特定反射光を発する構成をなしており、装置本体2側では、レーザ光の走査エリア上に基準物体80が配置されたときに、検出される反射光が、特定反射光であるか否かを判断している。そして、特定反射光であると判断されたときには、当該特定反射光の元となるパルスレーザ光の発生から、当該特定反射光が検出されるまでの時間を検出し、その検出時間に基づいて基準物体までの距離を算出している。そして、その算出された距離に基づき、走査エリアの一部を検出エリアとして設定している。
(もっと読む)
音源推定方法
【課題】車室内などの、室内モードの影響が大きい場所であっても、音源を精度よく推定することのできる音源推定方法を提供する。
【解決手段】複数のマイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を一定の速度でゆっくりと移動させて、異音発生の指摘があった場所Pを中心に音と映像の情報を採取し、各マイクロフォンM1〜M5で採取した音の音圧信号を用いて音源方向(θ,φ)とを周波数毎に算出した後、音源方向のデータ(θkj,φkj)と音源の方向の推定に用いたときに撮影された映像の画像データGkとを合成して、推定された音源の方向を示す図形32が描画された音源位置推定画面33kを作成し、この音源位置推定画面33k中の上記図形32が集中的に描画されている箇所を上記異音の発生源の方向として、異音の発生源を特定するようにした。
(もっと読む)
注意喚起装置
【課題】降車時における足元の安全の確保を図ることのできる注意喚起装置を提供する。
【解決手段】ECU10は、レーザセンサ20によって計測される車両の走行面までの距離と、不揮発性メモリ13に記憶保持されている、走行面範囲データ、乗員の平均的な足の大きさ以上の大きさを示す所定の大きさ、及び車両ドア90下方に相当する走査角度範囲に基づいて、車両ドア90下方の車両の走行面に乗員の平均的な足の大きさ以上の危険な窪みが存在するか否かを判定する。車両ドア90下方の車両の走行面に乗員の平均的な足の大きさ以上の危険な窪みが存在すると判定する場合には、ECU10は、警告音出力部60、表示部70、及び発光部80によって、車両ドア90の開扉時にユーザに注意を喚起する。
(もっと読む)
レーザレーダ装置
【課題】CW変調信号で強度変調されたレーザ光信号を送受して距離計測を行うとともに、先見情報を利用して1周期ごとの不確定性を除去することにより、正確な距離を検出可能なレーザレーダ装置を得る。
【解決手段】GPS10と、INS11と、地図情報保存部12と、光源1と、光源1からのレーザ光信号に対してCW変調信号により強度変調をかける光強度変調器2と、強度変調されたレーザ光信号30aをターゲット30に向けて送信するとともに、ターゲット30からの散乱光信号30bを受信する送信光学系5および受信光学系6と、散乱光信号30bを強度検波して電気信号に変換する光受信機7と、CW変調信号と受信信号との位相差Δφを検出する位相検波器8と、位相差Δφと先見情報とに基づいて、ターゲット30までの距離Lを検出する距離検出器9とを備えている。
(もっと読む)
距離測定装置、距離測定方法及び投影装置
【課題】より迅速に対象までの距離を算出する。
【解決手段】レーザー光源2a、2b、2cからスクリーン100に向かってレーザー光La、Lb、Lcを同時に照射させる(ステップS1)。このように、レーザー光源2a、2b、2cからレーザー光La、Lb、Lcを同時に照射させことから、後述するスクリーン100までの距離やスクリーン100の角度をより迅速に測定することができる。そしてステップS5においては、位相差検出回路5a、5b、5cを動作させて、レーザー光La、Lb、Lcと反射光成分Ra、Rb、Rcとの位相差を検出し、各位相差に基づき、各距離を算出する(ステップS6)。また、これらの距離を用いてスクリーンの角度の角度を算出し(ステップS7)台形補正を実行する(ステップS8)。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
ヤードクレーンの距離測定装置、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法
【課題】 赤外線などの不可視光を用いても光軸の調整を容易に行うことができるヤードクレーンの距離測定装置および、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法を提供する。
【解決手段】 不可視光を出射する光源部と、出射された不可視光を反射する反射部41と、出射された不可視光の反射を妨げる遮蔽部42とを有し、光源部から見た反射部41と遮蔽部42との相対位置が変更可能とされたターゲット22と、反射された不可視光を検出する検出部と、が設けられていることを特徴とする。
(もっと読む)
糸の速度を測定する方法及び装置
【課題】光ビームの照射領域に対して糸を正確に位置決めする必要のないドップラー干渉に基づいた糸の速度を測定する装置を提供する。
【解決手段】課題は、第1及び第2コヒーレント光波6a、6bを干渉させる、糸5の速度測定方法であって、ここで、第1光波6aは、糸5によって散乱させられた光を含み、そして、糸5に投射される第1光ビーム4aから生じた光波であるものとし、第2光波6bは、第2光ビーム4bから生じた光波であるものとし、そして、糸5の速度を光検出器8において光波6a、6b間のドップラー干渉から求めるものとする、前記方法において、糸5と接触させることなく、第2光ビーム4bを光検出器8へ導入させ、前記方法によって解決される。
(もっと読む)
構造体の構築方法および建入精度管理方法
【課題】計測時間および施工時間を短縮するとともに、施工済構造体の出来型形状把握の精度を高めて、構造物の施工精度を高める。
【解決手段】構造体を所定の節毎に順次建て入れて構造物を構築する工事に適用される構造体の建入精度管理方法において、建入れが完了している施工済構造体10の、次節構造体20との接続部分11を、三次元レーザスキャナ30を用いて立体的に計測し、構造体を製造あるいは加工する際に、施工済構造体10の接続部分11の出来型形状に基づいて、次節構造体20を補正加工し、その次節構造体20を建て入れる。
(もっと読む)
1 - 20 / 39
[ Back to top ]