
Fターム[5J084CA64]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 遅延(ディレイ) (43)
Fターム[5J084CA64]に分類される特許
1 - 20 / 43
空間情報検出装置
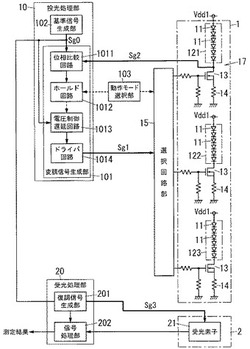
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
形質計測装置及び形質計測システム

【課題】映像情報を用いることなく、形状データに基づくルゴシティを得ることで、水中の形質を簡単に把握することができる形質計測装置を提供する。
【解決手段】レーザ発振器15によって水中の測定領域に向けてレーザ光を射出する。光センサ19によって測定領域に照射されたレーザ光の散乱光を反射光として検出する。演算用PC11によって反射光に基づいて測定領域の形状データを計測し、計測した形状データに基づいて、測定領域の面積と表面積との関係をルゴシティとして算出し、算出したルゴシティに基づいて測定領域の形質を判定する。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 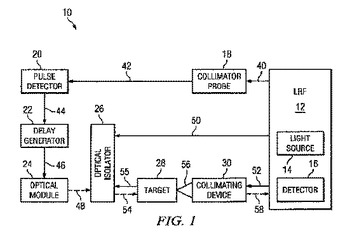 (もっと読む)
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
距離計用受光装置および距離計
【課題】対象物が有する要因による測定誤差等にも対処するための校正をすることができる距離計用受光装置を提供する。
【解決手段】距離計1Aは、投光装置10,受光装置20Aおよび制御部30Aを備える。受光装置20Aは、受光部21,パルス電流発生部22,電流-電圧変換部23,波高値検出部24,基準タイミング発生部25,タイミング検出部26,計時部27および校正部28Aを含む。校正部28Aは、パルス電流発生部22から波高値Iまたは遅延時間Tが調整されて出力されたパルス電流が電流-電圧変換部23に入力されたときに計時部27により求められる時間についての校正情報と、波高値検出部24により求められる波高値とに基づいて、反射光を受光した受光部21から出力されたパルス電流が電流-電圧変換部23に入力されたときに計時部27により求められた時間の校正をする。
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、高い時間的精度で距離測定するための、コスト的に有利な可能性を提供する。
【解決手段】10MHzのマスターサイクルから、周波数f1=400MHzないし周波数f2=410MHzの分割サイクルをつくる。差分周期の任意の倍数をつくり出すために、時間ベースユニットが、周波数f2のn番目の周期及び周波数f1のm番目の周期から成るペアを選ぶ。各ペアの位置はマスターサイクルに対して固定されており、例えばn=2及びm=6が4/f2+6ΔTの時間インターバルに相当し、1/f2=41ΔTである。そこでは、100ns経過して同期が起きるたびにカウンタがリセットされ、ペアの番号付けが最初から始まる。二つの周波数f1及び周波数f2に基づいて、検知区分よりもはるかに細かい時間ベースを使用できる。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、より高い時間精度で距離測定方法を提供する。
【解決手段】発光時点調整部20は、時間ベースユニット38で二つの周波数をベースにして高分解能の時間ベースを提供し、例えば60.975psの倍数で光パルスの発光を遅らせる。更に発光時点調整部20は発光時間微調整ユニット40を有し、多数の個別測定値を使って例えばガウス形状の発光パターンを形成することにより、実際に生じている発光時間遅延を、物理的に可能な発光時点と比べて、属する受光パターンの重心により理論的に任意に細分化する。即ち、時間ベースユニット38が直接的に分解能を変更し、その分解能が発光時間微調整ユニット40により、統計的な重心シフトを介して間接的に更に細分化される。このように高分解能にした時間区分で送られた光パルスが受光され、A/D変換部36でデジタル化され、ヒストグラムユニット42でヒストグラム解析が行われる。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、反射光を撮像するイメージインテンシファイア7b及び高速度カメラ8と、撮像タイミングを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、低視程要因の距離画像データへの影響を抑制するステップS3,S4の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像それぞれに対して輝度と頻度から物体以外のデータを距離画像データの生成から除外するステップS4〜S6の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
発光装置およびそれを用いる空間情報検出装置
【課題】距離画像センサなどに用いられ、変調光信号を放射する発光装置において、放射タイミングをフィードバック制御するにあたって、広い制御範囲に高い安定性を得る。
【解決手段】発光素子14から変調赤外線を放射し、測定対象物21からの反射光を受光素子22において複数の期間に分割して受光し、評価演算回路23が各期間の受光量から発光信号と受光信号との時間差を求め、測定対象物21の奥行きを含めた3次元形状を測定する距離画像センサ30における発光装置10において、発光素子14からのフィードバック信号とタイミング信号発生回路11からの発光制御信号との位相を位相比較回路15において比較して遅延時間調整回路12のフィードバック制御を行うにあたって、前記発光制御信号を固定遅延回路16を経て位相比較回路15に入力し、ループの固定遅延量(DC成分)を除去して、温度によって変化するAC成分だけを位相比較する。
(もっと読む)
距離測定装置
【課題】距離測定装置において、光の放射タイミングと受光タイミングとの相対誤差をフィードバック制御するにあたって、広い制御範囲に高い安定性を得る。
【解決手段】発光素子27から変調赤外線を放射し、測定対象物15からの反射光を受光素子27において複数の期間に分割して受光し、評価演算回路38が各期間の受光量から発光と受光との時間差を求め、前記測定対象物15の距離情報を測定する距離測定装置10において、相対的に遅延の小さい受光装置30側では、タイミング信号発生回路35と駆動回路36との間に固定遅延回路39を設けて前記相対誤差を粗調整する。発光装置20側には、駆動回路26の前段に遅延時間調整回路28を設けるとともに、位相比較回路19を設け、発光装置20と受光装置30との駆動信号間の位相差に対応したエラー信号で前記遅延時間調整回路28が前記相対誤差を微調整する。
(もっと読む)
1 - 20 / 43
[ Back to top ]