
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
161 - 180 / 526
画像監視装置

【課題】複数の撮像部により撮像された画像から検出された人物位置の情報を統合するときに同一人物の人物位置を別人物と誤る又は他人の人物位置を同一人物と誤る問題があった。
【解決手段】座標変換手段330は共通座標系に人物位置を座標変換し、投影線算出手段331は人物位置への投影線を算出し、経路長算出手段332は同時に撮像された監視画像の一方から検出された人物位置A1への投影線CAM1−A1上、及び他方の監視画像から検出された人物位置A2への投影線CAM2−A2上を通る当該人物位置間の経路長(D1+D2)を算出し、同様に人物位置A1とB2の間の経路長(D3+D4)を算出し、人物位置統合手段333は経路長がより短いペア「A1とA2」を他のペア「A1とB2」よりも優先的に同一人物の人物位置としてまとめることで人物位置の情報を統合する。
(もっと読む)
画像処理装置及び交通監視装置

【課題】 現地の環境や天候によって変化する路面の影響を受けずに停止車両、渋滞,落下物等の交通事象を検知することにある。
【解決手段】 道路に設置された監視カメラ1と、このカメラ映像から背景差分法を用いて車両候補領域を抽出する車両候補領域抽出部11と、カメラ映像から環境や天候によって変化する路面の状態を考慮して路面の領域を抽出する路面領域抽出部12と、前記車両候補領域と前記路面領域とを演算し、車両候補領域の中に含まれる現地の環境や天候の変化によって現れるノイズ領域及び路面領域を除外し、車両領域を検出する車両領域検出部13と、この車両領域検出部13から出力される車両領域の位置及び前記路面に対する前記車両領域の割合から交通事象を検知する交通事象検知部3と、この検知された交通事象をカメラの映像上に表示するモニター表示装置4とを備えた交通監視装置である。
(もっと読む)
画像のシーケンスを処理する方法および装置、記憶媒体ならびに信号
【課題】画像の第1のシーケンス及び画像の第2のシーケンスを処理して、該第1のシーケンスと該第2のシーケンスとを比較する方法及び装置を提供する。
【解決手段】(i)画像内の複数の画素近傍集合のそれぞれに対する画像データを処理して、該画素近傍集合のそれぞれに対する少なくとも1つの記述子要素を生成すること、及び、(ii)記述子要素から全体画像記述子を形成することによって、第1のシーケンスの各画像、及び第2のシーケンスの各画像が処理される。比較されている画像のそれぞれの全体画像記述子間の距離を計算することによって、第1のシーケンス内の各画像と、第2のシーケンス内の各画像とが比較される。距離は行列内に配列され、該行列が処理されて類似画像が特定される。
(もっと読む)
三次元形状特定装置、三次元形状特定方法、三次元形状特定プログラム
【課題】障害物の位置と高さを含む三次元形状を詳細に特定することが可能な三次元形状特定装置、三次元形状特定方法、及び三次元形状特定プログラムを提供する。
【解決手段】移動するカメラの移動前後において画像が撮影される。特徴点抽出部51にて、撮影画像内に含まれる対象物の特徴点が抽出される。次いで特徴点対応付け部52にて、異なる撮影画像の特徴点同士が対応付けられる。次いで高さ判定部55にて、基準平面に対してdα(α=1,2,…,N)離れた位置に仮想的に配置される仮想平面に対する射影変換行列であって、予めカメラの移動パラメータや位置情報に基づいて算出された射影変換行列の関係を満たす特徴点の対応が抽出される。抽出された特徴点の対応にて示される対象物の部位は、仮想平面上に配置していると判断する。次いでグルーピング部56にて、同一仮想平面上に載る特徴点がグルーピングされる。
(もっと読む)
視覚的目標追跡
目標を追跡する方法は、ソースから目標の観察された奥行き画像を受け取ること、及び目標のポーズをとらせたモデルを得ることを含む。モデルは合成された奥行き画像へとラスタライズされ、モデルの姿勢は、観察された奥行き画像と合成された奥行き画像の間との間の差に少なくとも部分的に基づいて調節される。 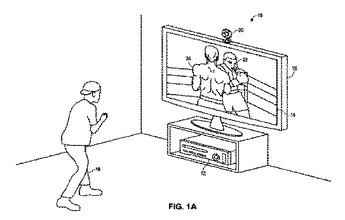 (もっと読む)
(もっと読む)
画像処理装置、画像照合方法、および、プログラム
【課題】より精度の高い距離算出を実現する。
【解決手段】特徴点抽出部213が、第1撮像部100Aおよび第2撮像部100Bで取得された画像の一方で特徴点を設定すると、テンプレート設定部214は、特徴点を含む基準テンプレートを、撮像画像のエッジ抽出画像上に設定する。基準テンプレート内の画像がエッジによって分断されている場合、テンプレート設定部214は、分断された領域のうち特徴点を含んでいない領域を基準テンプレートから削除し、削除した領域と同じ面積の領域を、分断された領域のうち特徴点が含まれている領域に、エッジを越えないように追加した変形テンプレートを設定する。距離算出部215は、基準テンプレートもしくは変形テンプレートのいずれかを用いて、他方の画像の他方に対するテンプレートマッチングをおこない、マッチングのとれた特徴点までの撮影距離を算出する。
(もっと読む)
車両用道路標示認識装置および車両用道路標示認識方法
【課題】道路形状を十分な精度で推定するための基礎となり得る車両用道路標示の認識データを取得可能な車両用道路標示認識装置および車両用道路標示認識方法を提供する。
【解決手段】望遠カメラ201で取得した画像信号に基づいて、第一変数群算出部105において、該当する走行路におけるカーブの曲率を算出し、広角カメラ202で取得した画像信号に基づいて、第二変数群算出部106において、車両用道路標示に対する自車の車幅方向の相対位置、走行路面からの自車の上下方向の距離、自車のピッチング方向の変位量、および、自車のヨー方向の変位量等を算出し、更に、第一変数群算出部105および第二変数群算出部106において各取得した変数群のデータに基づいて、車両用道路標示認識処理部107において、自車に対する当該車両用道路標示の位置を認識し該認識を表す認識データを得る。
(もっと読む)
画像からの深度マップの作成
複数の画像に対して複数の深度マップを生成する方法は、第1の画像を受信するステップと、前記第1の画像により規定されるショットに関する情報を取得するステップと、第1のスキーマによって前記第1の画像に対する深度マップを生成するステップと、第2の画像を受信するステップと、前記第2の画像により規定されたショットに関する情報を取得するステップと、前記第1の画像と前記第2の画像との間の前記取得された情報の変化を検出するステップと、第2のスキーマによって前記第2の画像に対する深度マップを生成するステップとを有し、前記第2のスキーマは、前記第1のスキーマの複雑さとは異なる複雑さを持つ。前記方法は、第1及び第2の深度モデルにアクセスするステップを有することができる。一実施例において、前記第1のスキーマは、前記第1の深度モデルを有し、前記第2のスキーマは、前記第2の深度モデルを有し、第2の実施例において、前記第1のスキーマは、前記第1の深度モデルを有し、前記第2のスキーマは、前記第1及び第2の深度モデルの組み合わせを有する。  (もっと読む)
(もっと読む)
カメラ装置
【課題】道路の白線や道路端立体物の検出が難しい状況においても、自車前方の道路線形を推定でき、又は、カーブの手前でブレーキを制御して自車を減速させる必要があるか否かを判定できるカメラ装置を提供する。
【解決手段】自車106の走行道路前方を撮像する複数の撮像部107、108を有するカメラ装置105は、複数の撮像部107、108により撮像した画像に基づいて走行道路102の消失点付近に存在する前方立体物101を検出する前方立体物検出部114と、前方立体物検出部114により検出した検出結果に基づいて、走行道路102のうちの遠距離部分の道路線形を推定する道路線形推定部113を有する。
(もっと読む)
建築物変化検出装置、建築物変化検出方法、及びプログラム
【課題】地図上の建築物の変化をより高精度に検出する。
【解決手段】建築物変化検出装置1は、旧年度時点と新年度時点との間における地図上の検出対象領域の建築物の変化を検出する。旧年度画像データ取得部10は、旧年度時点において検出対象領域を撮影した旧年度画像データを取得する。新年度画像データ取得部20は、新年度時点において検出対象領域を撮影した新年度画像データを取得する。地物変化検出部30は、旧年度画像データと新年度画像データとを比較して、検出対象領域における地物の変化を検出する。建築物非存在領域特定部40は、検出対象領域の中において、建築物が存在しない建築物非存在領域を特定する。建築物変化検出部50は、検出対象領域から建築物非存在領域を除外した領域において地物変化検出部30により変化が検出された地物を、検出対象領域において変化した建築物とすることにより、検出対象領域の建築物の変化を検出する。
(もっと読む)
3次元物体モデル情報生成装置及びプログラム
【課題】正確な3次元物体モデル情報を生成する装置を提供する。
【解決手段】装置は、入力される画像の集合から、任意の2つの画像の組を複数生成し、生成した画像の組に関連付けられ、関連する組の画像の対応する画素を示す視差マップを生成する視差マップ生成手段と、各画像の組及び各組に関連付けられた視差マップに基づき、3次元空間の位置を複数示す奥行き候補位置情報を出力する奥行き候補位置情報生成手段と、奥行き候補位置情報に基づき、被写体表面の3次元空間位置を示す3次元物体モデル情報を生成する調整手段と、調整手段が生成した3次元物体モデル情報の合否を閾値により判定する判定手段とを備えている。
(もっと読む)
動作認識装置及び方法
【課題】映像による人物の行為認識において、色情報で顔領域とその他の領域とを区別することが困難な場合でも、人物の動作を認識できるようにする。
【解決手段】行為推定装置205は、高解像度カメラ211及び213により得られた各画像を複数の小領域に分割し、人物の同じ部分を撮像したものと認識した、それぞれの画像の小領域同士を対応付ける。そして、対応付けられた2つの小領域の対応点の距離を視差として計算する。次に、人物の顔を撮像した顔領域の視差と、人物の顔以外の肌色部分を撮像した肌色領域の視差とを比較し、顔領域の周辺で顔領域の視差に近い視差を有する肌色領域を、腕領域として検出する。そして、顔領域に対する腕領域の相対的な位置、及び、顔領域の視差と腕領域の視差の差に基づいて、人物の腕の動作を認識する。
(もっと読む)
移動体認識システム及び移動体認識方法
【課題】水面や水中の移動体の誤計測を防止する。
【解決手段】移動体計測システム1において、ビデオカメラ2aは、水面から上方に離れた位置に設置され、水面上の所定領域Sの画像を撮影できるように、カメラの位置及び向きが調整される。ビデオカメラ2bは、ビデオカメラ2aと水面を挟んで対向するような水中の位置に設置され、水面を仰ぎ見た状態での所定領域Sの画像を撮影できるように、カメラの位置及び向きが調整される。ビデオカメラ2a及び2bは、定期的に同じ箇所の画像を撮影し、撮影した画像データを撮影日時とともに情報処理装置3に送信する。情報処理装置3は、移動体4の計数処理を行う装置であり、特に、ビデオカメラ2a及び2bが同じ時刻に撮影した画像データを逐次受信し、ビデオカメラ2aの2つの画像データと、ビデオカメラ2aの2つの画像データとを比較し、輝度の時間的変化の異なる部分を削除し、移動体を抽出する処理を行う。
(もっと読む)
移動体検出装置
【課題】簡易な構成で、確実に移動体の通行を検出することができる装置を実現する。
【解決手段】人が通行する通路を挟んで線状の発光面を有する線状光源装置200と画像取得装置300を配置する。画像取得装置300は線状光源装置200の発光面をその視野内におさめるように配置する。移動体検出装置100は、通路に通行がない状況において撮影された点灯中の線状光源装置200の画像を照合画像として格納しており、通路に通行の可能性があり線状光源装置200の発光面が点灯している状況において、画像取得装置300が周期的に撮影した画像を判定対象画像として入力し、照合画像と判定対象画像の差分を抽出して、差分の程度により通路を人が通行しているかどうかを判定する。
(もっと読む)
環境認識装置
【課題】撮像装置による撮像範囲を含む環境に存在する対象物が四足動物に該当するか否かの認識精度の向上を図ることができる装置を提供する。
【解決手段】環境認識装置1によれば、対象物の姿勢を表わす第1主成分ベクトルy1が抽出され、この主成分ベクトルy1の水平軸に対する傾斜角度が基準角度をはさんで周期的に変化しているか否かに応じて、この対象物が四足動物に該当するか否かが判定される。「基準角度」は基準軸の水平軸に対する傾斜角度であり、「基準軸」の鉛直軸に対する傾斜角度は水平軸に対する傾斜角度以上となるような姿勢を有する軸である。
(もっと読む)
画像処理方法、画像処理装置及びシステム
【課題】 本発明で、高品質顔画像を検出するおよび抽出することのは簡単である。
【解決手段】 共通の場面の様々な位置に配置された複数のカメラによってキャプチャされる画像を処理する画像処理方法であり、キャプチャされた画像から顔画像を検出し、各々の対応する顔画像について様々な顔のポーズ角について複数の合成画像を含む1セットの合成画像を生成するために、所定の顔のポーズモデルを用いることにより、様々なポーズ角について検出された各顔画像を処理し、各合成画像から特徴ベクトルを抽出し、異なるセットの合成画像間の特徴ベクトル距離を計算することにより、合成画像の異なるセットの間の距離を計算し、合成画像の異なるセット間の距離に基づいて、検出された顔画像をクラスタリングする。
(もっと読む)
画像処理装置、画像検査方法、及びプログラム
【課題】検査画像列と参照画像列との間の比較に際し、画素値の誤差をある程度許容しながらオフセットの検出を行うこと。
【解決手段】検査画像列及び参照画像列を取得する画像列取得部と、各参照フレームについてフレーム全体又はフレームを分割した各部に相当するブロックごとに参照画像変動量を算出する参照画像解析部と、前記参照画像変動量に基づいて前記参照画像列における画像の変動が特徴的に現れる参照フレーム番号、ブロックレベル、及びブロック番号を含むデータセットを選択する特徴位置選択部と、前記データセットに含まれるブロックレベル及びブロック番号における検査画像変動量が最も大きい検査フレーム番号を検出する検査画像解析部と、前記検査フレーム番号と前記参照フレーム番号との差に相当する前記検査画像列と前記参照画像列との間のオフセットを算出するオフセット算出部と、を備える画像処理装置を提供する。
(もっと読む)
複数の視点のシーン解析のシステム及び方法
視覚的注意モデルリング技法を使用する、複数の視点からシーンを評価するシステム及び方法。  (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】車両の左右旋回による左右側方画像におけるオプティカルフローの演算を簡素化し、移動物体認識のための画像処理の容易化を図れる車両周辺監視装置を提供する。
【解決手段】自車両Cの互いに異なる場所に設置された複数の撮像装置1によって撮影された側方画像Gsをもとに、自車両の上方の仮想視点Bpから見た俯瞰画像である車両周辺画像Gfを生成する車両周辺画像生成手段2と、車両周辺画像中の特徴点Pを抽出すると共に同特徴点の動きベクトルを計算する特徴点抽出手段3と、特徴点の動きベクトルから自車両のヨーレイトωを算出するヨーレイト算出手段4と、側方画像を画面に表示可能なモニタ5と、側方画像中より抽出した特徴点Qのフローよりヨーレイト分を減じることで得られた補正特徴点Q’に基づきモニタ画像内の対向物体に対する認識処理を行う対向物体認識手段6と、を具備した。
(もっと読む)
高速衝突判定処理システムおよびコンピュータプログラム
【課題】 高速で飛行する飛翔体に対してリアルタイム追跡を可能にし、風力発電装置へのバードストライク防止の確実性を高める。
【解決手段】風力発電装置(20)の周囲に三次元座標で表現される危険領域(11)を予め設定し、前記危険領域(11)の外方から撮像する撮像方向がX軸、Y軸、Z軸の三次元で互いに直交する3台のX軸、Y軸、Z軸撮像手段(12),(13),(14)を用いて飛翔体(30)を撮像し、3台の各撮像手段で撮像した画像データに基づいてYZ軸、ZX軸、XY軸座標面(15),(16),(17)における前記飛翔体(30)の二次元像を画像処理装置(18)で追跡測定し、かつ、前記飛翔体(30)の二次元位置座標及び速度を計算し、この計算した飛翔体(30)のYZ軸、ZX軸、XY軸座標及び速度により前記飛翔体(30)がYZ軸、ZX軸、XY軸座標面(15),(16),(17)のそれぞれの危険領域(11)内に進入するか否かを予想判断する。
(もっと読む)
161 - 180 / 526
[ Back to top ]