
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
101 - 120 / 526
画像処理装置、画像処理方法、およびプログラム
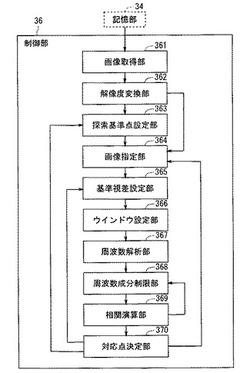
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
動線連結方法,装置及び動線連結プログラム

【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結できるようにする。
【解決手段】連結元動線の終点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。連結先動線の始点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。各人物画像との同定処理を行う。そして、同一人物であることが確認されると、連結元動線に連結先動線を連結する。
(もっと読む)
動線関連付け方法、装置及びプログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを関連付けられるようにする。
【解決手段】第1の動線データベースから第1の画像監視エリア内に位置した移動体の動線データを選択し、この動線データの移動体が第1の画像監視エリア内に位置する時点のカメラ画像データを第1の画像データベースから選択して、このカメラ画像データから移動体画像を抽出する。第2の動線データベースから第2の画像監視エリア内に位置する移動体の動線データを選択し、この動線データの移動体が第2の画像監視エリア内に位置する時点のカメラ画像データを第2の画像データベースから選択し、このカメラ画像データから移動体画像を抽出する。両移動体画像を照合して各画像の移動体が同一か判定し、同一であると判定されると、両動線データの関連付けを行う。
(もっと読む)
認識装置、認識方法及び認識プログラム
【課題】認識環境に関わらず認識対象を認識することが可能な認識装置、認識方法及び認識プログラムを提供する。
【解決手段】認識装置1は、動画を構成する時系列のフレーム画像から、人物の特定部位のフレーム画像内での位置を検出し(ステップS1)、検出した部位の位置及び位置の変化を示す複数種のパラメータの値を、パラメータ値群としてフレーム画像毎に導出し(ステップS2)、そして、対象物に対応付けて、複数のパラメータ値群を時系列で並べたパラメータ値群列を予め記録しているデータベースの記録内容を参照することにより、導出したパラメータ値群の時系列の並びに基づき、動作の対象となった対象物を認識する(ステップS3,4)。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
運転者監視装置、運転者監視方法及び車両
【課題】カメラの基線長を長く設定することなく、かつ、外乱の影響に妨げられずに十分な精度で運転者の顔向きを検出する運転者監視装置を提供する。
【解決手段】運転者の顔向きを監視する運転者監視装置10であって、運転者に対して近赤外光を照射する補助照明22と、複数のレンズ211a、211bと、複数のレンズ211a、211bのそれぞれに対応する撮像領域214a、214bを有する撮像素子214とを有し、運転者の顔を撮影する複眼カメラ21と、複眼カメラ21で撮影することで得られる画像を処理し、運転者の顔の特徴点の3次元位置を検出することで、運転者の顔向きを推定するECU30とを備え、複眼カメラ21は、複数のレンズ211a、211bの並ぶ方向である基線方向が鉛直方向に一致するように配置される。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
映像表示方法および映像表示装置
【課題】映像表示装置に表示された映像に対する不特定多数の視聴者に特別な視線入力装置を装着することなしに、複数の映像視聴者の興味が集まる映像を表示部に入れ替え可能に表示する映像表示方法及び映像表示装置を提供する。
【解決手段】映像表示部101の表示画面101Aを視聴している複数の視聴者の興味が集まる映像を視聴者の視線情報と顔画像の位置情報に基づいて検出する。興味が集まる映像が副表示領域101Cに表示されている場合には、この映像が主表示領域101Bに表示されるように映像を入れ替える。
(もっと読む)
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 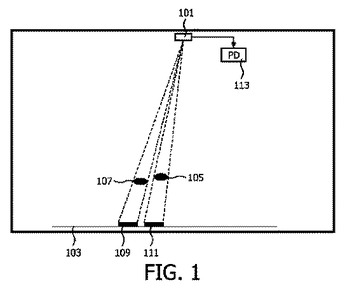 (もっと読む)
(もっと読む)
プレゼンテーション用カメラ・ナビゲーション
ジェスチャー・ベースのシステムにおいて情報のプレゼンテーションを管理する技法であり、ジェスチャーは物理空間におけるユーザーの身体の位置および動きから得られる。この技法によって、ユーザーは、情報が提示される態様を制御するために、またそれ以外ではジェスチャー・ベース・システムと対話処理するためにジェスチャーを使用することができる。ユーザーは、本システムの態様を制御するジェスチャーを使用して聴衆に情報を提示することができ、または複数のユーザーがジェスチャーを使用して一緒に作業を行い、システムの制御を共有することができる。つまり、実施形態の一例では、一人のユーザーがジェスチャーによって聴衆への情報のプレゼンテーションを制御することができる。他の実施形態の一例では、複数の参加者が、キャプチャー・デバイスによって取り込まれたジェスチャーを介して、プレゼンテーションの制御を共有することができ、またそうでなければシステムと対話処理してプレゼンテーションの態様を制御することができる。 (もっと読む)
車両周辺監視装置
【課題】そこで、本発明は、眼鏡を掛けた歩行者や帽子を被った歩行者について、歩行者であることの判定ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像のグレースケール画像を2値化処理して生成された2値画像から、処理対象画像部分を抽出する2値画像候補抽出手段20と、処理対象画像部分が歩行者の頭部の特徴を有するか否かを判断して、処理対象画像部分に対応する実空上の物体が歩行者であるか否かを識別する歩行者識別手段21とを備え、歩行者識別手段20は、所定範囲内の間隔をもって垂直方向に対向した二つの処理対象画像部分75,76が抽出されたときには、該間隔部分を埋めて該二つの画像部分を一体化した画像部分について歩行者の頭部の特徴を有するか否かを判断して、該二つの画像部分に対応する実空間上の物体が歩行者であるか否かを識別する。
(もっと読む)
画像パターン照合装置および方法
【課題】第1画像パターンと第2画像パターンとの間の相対変位量をピクセルピッチ未満の分解能で正確に求めることができる画像パターン照合装置および方法を提供する。
【解決手段】第1変位量演算部は、第1画像パターンと第2画像パターンとの対応関係をピクセルピッチの単位で求め、第1画像パターンにおける特定位置に対する第2画像パターンにおける対応位置の相対変位量(ax,ay)を求める。第1フーリエ変換部,第2フーリエ変換部,複素積演算部,傾斜位相付与部および変換部は、第1画像データpの離散的フーリエ変換Pと第2画像データqの離散的フーリエ変換Qの複素共役Q*との積に対して傾斜位相を付与して離散的逆フーリエ変換したデータr2を求める。点対称度合演算部は、データr2のピーク位置を中心とする前記データr2の点対称の度合を求める。
(もっと読む)
ロボットの駆動システム、及び、ロボットの駆動プログラム
【課題】 形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動するシステムを提供することにある。
【解決手段】 ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。
(もっと読む)
画像処理装置、その画像処理方法及びプログラム
【課題】
画像上に類似した線分が存在する場合や画像上に線分が密集している場合であっても、画像間の線分を正確に対応付けられるようにした技術を提供する。
【解決手段】
画像処理装置は、対象物体を異なる位置及び方向から撮影した画像を入力する入力手段と、前記入力手段により入力された複数の画像各々から前記対象物体を示す線分を検出する検出手段と、前記検出手段により検出された線分各々を識別するのに用いる特徴ベクトルを求める特徴導出手段と、前記特徴導出手段により求められた特徴ベクトルに基づいて前記複数の画像間における線分各々の対応付けを決定する決定手段とを具備し、前記特徴導出手段は、前記検出手段により検出された線分を通過し且つ該線分に平行でない方向に沿って参照ラインを設定し、当該参照ライン上において輝度が変化した画素の輝度情報をその順序に従って並べた情報を要素として含む特徴ベクトルを求める。
(もっと読む)
路面形状認識装置
【課題】路面上に車線が標示されている場合は勿論、車線が標示されていない場合でも実際の路面形状を的確に検出することが可能な路面形状認識装置を提供する。
【解決手段】路面形状認識装置1は、自車両が走行する路面について位置のデータを検出して距離画像Tzを生成する距離画像生成手段6と、距離画像Tzの各水平ラインj上の距離zのデータをヒストグラムHjに投票して水平ラインjごとの代表距離zjを検出し、水平ラインjごとに代表距離zjを仮想平面上にプロットする代表距離検出手段10と、連続性を有しないと評価したプロットを仮想平面上から除外する評価手段11と、除外されずに仮想平面上に残存している全てのプロットに対して近似直線L1、L2を算出する近似直線算出手段12と、近似直線L1、L2の組み合わせを用いて路面形状モデルを生成する路面形状モデル生成手段13とを備える。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 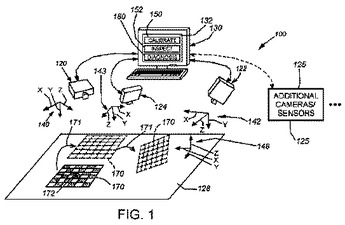 (もっと読む)
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
表情モニタリング方法および表情モニタリング装置
【課題】 撮影角度が異なる場合でも、顔の向きに影響されずに表情の変化を正しく評価することができる表情モニタリング方法を提供する
【解決手段】 ステレオカメラを用いて左右一対の顔画像を撮影する工程と、複数の計測点について左右の画像それぞれに定義される二次元座標系での二次元座標(xL,yL)、(xR,yR)を抽出して対応付けを行う計測点対応付け工程と、撮影空間に定義される三次元座標系での各計測点の三次元座標(Xp,Yp,Zp)を算出する三次元座標算出工程と、オイラー角による補正を行うことにより表情要素の画像を原点方向に向けたときの各計測点の補正三次元座標(X’p,Y’p,Z’p)を算出する補正三次元座標算出工程と、各計測点の補正二次元座標(X’p,Y’p)を算出する補正二次元座標変換工程と、フーリエ記述子を用いて定量的に表現する評価工程とからなる。
(もっと読む)
移動軌跡図作成装置およびコンピュータプログラム
【課題】 ハイエンドなハードウェアを採用せずとも、人為的条件に左右されにくい、これまでよりも客観的なデータ取得を実現可能な飛翔体軌跡算出の技術を提供する。
【解決手段】 前記複数箇所のそれぞれの撮影手段にて飛翔体を撮影した画像データおよびその画像データを取得した時刻データを記録する画像データ記録手段と、それぞれの画像データおよび時刻データを入力するデータ入力手段と、その時刻データを用いて画像データを同期させるデータ同期手段と、そのデータ同期手段にて同期された画像データから飛翔体が三次元空間を移動する軌跡を含む解析データを算出する3D算出手段と、その3D算出手段が算出した解析データを出力する解析データ出力手段と、を備えた飛翔体軌跡算出装置を提供する。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
101 - 120 / 526
[ Back to top ]