
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
61 - 80 / 526
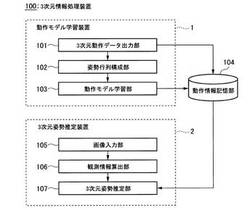
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
画像セキュリティシステム

【課題】セキュリティ機能が強化されたセキュリティシステムを提供する。
【解決手段】個人情報入力装置31から入力されたユーザの個人情報は、ネットワーク40経由で権限照合部211に出力される。権限照合部211は個人ID記憶装置221に記憶された個人情報と照合を行うとともに、個人情報に対応する移動経路キーを移動経路キー記憶装置222から取得する。画像検索部212は、個人情報に対応するキー画像をキー画像記憶装置223から取得し、キー画像に基づいて複数の画像記憶装置12を検索し、カメラ11で撮影されたユーザの画像を複数取得する。移動経路生成部213は、検索されたユーザの画像に基づいてユーザの移動経路情報を生成する。解除判定部214は、生成された移動経路情報と移動経路キーとが一致する場合、電子ロック装置を解除させる。
(もっと読む)
形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置
【課題】形状ベースマッチング処理における精度や処理時間、ロバスト性等の特性に関して最適化されたテンプレートデータを作成するための形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置を提供する。
【解決手段】形状ベースマッチング処理を用いて電子部品2の搭載位置決めをする部品実装装置において、サーチ評価画像を取得し、このサーチ評価画像をもとに上記パラメータを調整する。このとき、先ず、位置決め処理の精度が、ユーザが指定した要求精度を満たすようにパラメータを設定する。次に、位置決め処理のタクトタイムが短縮する方向に上記パラメータを徐変しながら精度を評価し、当該精度が要求精度を保てる限界値を最適なパラメータとして取得する。この最適パラメータ取得処理を、部品ロットの切り替わりに際し必要に応じて行う。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
情報提示システム、情報提示プログラム、及び情報提示方法
【課題】特別なセンサ設備を有しなくても、対象物の固有情報を迅速かつ簡易に取得・提示することができる情報提示システム、情報提示プログラム、及び情報提示方法を提供すること。
【解決手段】情報提示システム1は、室内A内に配された複数の家電機器E1,E2,E3及びユーザUに関する画像情報を獲得する画像情報取得部と、家電機器E1,E2,E3に関する固有情報を獲得する固有情報取得部と、家電機器E1,E2,E3の画像情報から、室内A内における家電機器E1,E2,E3の位置情報を算出する位置情報取得部と、ユーザUが所望する家電機器を特定する取得対象分析部と、特定された家電機器の画像に該家電機器に係る固有情報を付加する画像処理部と、を備え、取得対象分析部が、ユーザUの画像情報から指差し位置及び指差し方向を算出するジェスチャ認識部と、その家電機器を特定する特定部と、を備えている。
(もっと読む)
デザイン製作装置、デザイン製作方法
【課題】設置場所の画像や周辺情報のみに基づいて、設置場所に最適なデザインを製作する構成要素を算出することができる、デザイン製作装置を提供する。
【解決手段】本発明のデザイン製作装置3は、デザインを製作する設置領域1の面積を算出する面積算出手段4と、設置領域1の周辺情報を記憶する第1記憶部5と、設置領域1に用いられるデザインの複数の原画を記憶する第2記憶部6と、面積、周辺情報および原画の少なくとも2つに基づいて、デザインの構成要素を算出する算出手段7と、を備える。
(もっと読む)
注目位置推定方法、画像表示方法、注目コンテンツ表示方法、注目位置推定装置および画像表示装置
【課題】 事前に情報登録などが行えない不特定多数の人物に対して、その人物の顔・視線方向を高精度に計測することで、人物が注目している位置を計測する注目位置推定装置を提供する。
【解決手段】 注目位置推定装置において、得られた顔画像に対して画像認識処理を行うことで、その顔の年齢や性別などの属性情報を推定し、推定された属性情報に従って顔方向計測のためのモデルを選択・修正する。このモデルを用いて顔方向を計測することで人物ごとの個人差の影響を抑制して顔・視線方向を計測し、注目位置を計測する。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法、並びに移動体
【課題】撮影した画像の閲覧制限を高精度に行う。
【解決手段】判定値算出部28が、パーティクルフィルタの各サンプルの位置姿勢において、地図情報に基づいて閲覧禁止多面体を画像に投影するとともに、閲覧禁止多面体が投影された画素における奥行き値を地図情報に基づいて算出し、各サンプルの位置姿勢において算出された各画素における奥行き値の最小値を、各画素の閲覧禁止奥行き判定値とする。また、判定値算出部28が、各サンプルの位置姿勢において、閲覧禁止多面体を画像に投影したときのサンプルの尤度に基づく値を、閲覧禁止多面体が投影された画素に対して累積して、その累積値を各画素のマスク判定値とする。そして、閲覧画像生成部30が、画像のうち閲覧禁止奥行き判定値が奥行き情報よりも小さい画素で、かつマスク判定値が所定の閾値よりも大きい画素の閲覧を禁止した閲覧画像を生成する。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
動線処理装置、方法及びプログラム
【課題】動線データの揺動を抑制し、高精度の動線長が得られるようにする。
【解決手段】動線処理装置は、監視領域内を移動する移動体の監視領域内における位置データを時系列に記述してなる動線データを取得し、この動線データに対して空間的フィルタリングを行う。そして、空間的フィルタリングが行われた動線データを出力する。
(もっと読む)
情報処理装置、3次元位置算出方法及びプログラム
【課題】被写体の3次元位置を高速、かつ、安定的に算出する。
【解決手段】少なくとも2つの異なる視点から被写体150を撮像する撮像装置100、110で撮像された被写体150の各画像の色情報に基づいて各画像を複数の領域に分割する領域分割手段と、各画像上に設定された走査線と、領域分割手段で分割された各画像の領域の境界線と、の交点の近傍の領域に基づいて、交点の特徴量を算出する交点特徴量算出手段と、交点特徴量算出手段で算出された交点の特徴量に基づいて各画像の間の対応点を求める対応付け手段3000と、対応付け手段で求められた対応点の視点に対する3次元位置を算出する3次元位置算出手段4000と、を有する。
(もっと読む)
行動監視システム、行動監視プログラム、及び行動監視方法
【課題】監視対象が多数の場合であっても、監視対象の識別及び行動把握を容易に行うことができる行動監視システム、行動監視プログラム、及び行動監視方法を提供すること。
【解決手段】監視対象Tの光学像が入力される撮像部、監視対象Tと背景とを分離して監視対象Tの各特徴量を算出する特徴量算出部、特徴量から監視対象Tの各移動軌跡を算出する移動軌跡算出部、監視対象Tの所定部位の3次元位置座標を算出する位置座標算出部、所定部位の3次元位置座標に基づき、所定部位の移動速度及び移動方向を算出、所定部位の各動作軌跡を算出する動作軌跡算出部、特徴量及び3次元位置座標がステレオカメラ4間で類似する移動軌跡を繋げて、監視対象T毎の統合移動軌跡を生成する移動軌跡統合部、特徴量及び3次元位置座標がステレオカメラ4間で類似する動作軌跡に対して、監視対象T毎の統合動作軌跡を生成する動作軌跡統合部、を備えている。
(もっと読む)
空模様判定システム及び空模様判定方法
【課題】安易且つ平易に空模様を判定すること。
【解決手段】空を撮影する撮像装置と前記撮像装置で撮影された撮像画像から空模様を判定する空模様判定装置とを備えた空模様判定システムにおいて、前記空模様判定装置は、前記撮像画像を入力して画像記憶手段に記憶する画像入力手段と、前記撮像画像を前記画像記憶手段から読み出して、前記撮像画像の画像データを用いて彩度及び明度を計算する特徴量計算手段と、計算された前記彩度及び前記明度に基づいて前記撮像画像の空模様を判定する空模様判定手段と、を有することを特徴とする空模様判定システム。
(もっと読む)
画像処理装置、画像処理方法
【課題】 HDR動画において動き補正を精度よく行い、動きぼけを改善する為の技術を提供すること。
【解決手段】 動きベクトル決定部114は、画像Zに対して設定された信頼度が画像Wに対して設定された信頼度よりも高い場合には、画像Xから画像Zへの動きベクトルを出力する。画像Zに対して設定された信頼度が画像Wに対して設定された信頼度よりも低い場合には、画像Yから画像Wへの動きベクトルを出力する。
(もっと読む)
対象体認識方法と装置
【課題】対象体の形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する場合に、対象体領域の外周部付近に不明瞭な形状部分が発生する可能性を低くする。
【解決手段】計測点から対象体上の各被計測点までの距離を計測することにより、または、対象体を撮像することにより、対象体の形状データを取得する形状データ取得ステップS1と、形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する領域生成ステップS2と、生成した対象体領域に対し修正処理を行う領域修正ステップS3とを有する。修正処理は、縮小処理および拡大処理の少なくとも一方を含む。対象体領域の外周部分または内周部分を処理対象領域とし、(A)縮小処理は、対象体領域内に含まれる処理対象領域を対象体領域から削除する処理であり、(B)拡大処理は、対象体領域外に位置するとともに該対象体領域に隣接する処理対象領域を対象体領域に統合する処理である。
(もっと読む)
車両用白線認識装置
【課題】車線区画線の内側に補助線が存在する場合や路面上に多くのノイズが存在する場合等においても精度良く車線区画線を検出することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上の白線検出領域A内で水平方向に延在する検索ラインL毎に車幅方向内側から外側に向けて輝度変化を調べ、輝度が暗から明に所定以上変化する最初のエッジ点を第1候補点として検出すると共に、最後のエッジ点を最終候補点として検出し、これら第1候補点からなる点群と最終候補点からなる点群との一致率が高い場合には第1候補点に基づく白線認識を行い、一致率が低い場合には最終候補点に基づく白線認識を行う。
(もっと読む)
移動体挙動検出装置及び方法
【課題】移動体のヨー方向と横方向の挙動を高い精度で区別できる移動体挙動検出装置等を提供する。
【解決手段】前方撮像カメラ及び後方撮像カメラにより撮像された画像を取得し、車両1の前方方向に含まれる前方特徴点Pfと、当該前方方向とは異なる後方方向に含まれる後方特徴点Pbとを計測し、車両1の前方方向に含まれる前方特徴点Pfの移動方向(Pf’→Pf)と、車両の後方方向に含まれる後方特徴点Pbの移動方向(Pb’→Pb)とを比較する。当該双方の移動方向が異なる場合には車両1が横方向に移動していると判別し、当該双方の移動方向が同じである場合には車両1がヨー方向に移動していると判別する。
(もっと読む)
対象画像の追尾装置およびその動作制御方法
【目的】対象画像の追尾精度を向上させる。
【構成】立体撮像ディジタル・カメラを用いて被写体を撮像し,右目用画像と左目用画像とを周期的に得る。両方の画像で対象画像の検出処理が行われ(ステップ71),対象画像が検出されると(ステップ72でYES),右目用画像,左目用画像のうち,その後に撮像される画像については対象画像が検出された方の画像で対象物を検出するように設定される(ステップ73)。設定された方の画像で対象画像検出処理が行われる(ステップ74)。対象画像が検出されると(ステップ75でYES),対象画像らしさがしきい値未満のときには(ステップ76),両方の画像で対象画像の検出処理が行われ(ステップ77),対象画像らしさのスコアの高い方の画像を用いて対象画像を検出するように設定される(ステップ79)。
(もっと読む)
対応点探索のための画像処理方法
【課題】
対応点探索において、NCCフィルタリングに関するジレンマを解決する。
【解決手段】
画像パッチ間の類似性を比較する方法であって、それぞれが少なくとも一つの画像パッチを供給する少なくとも2つの画像供給源から、少なくとも2つの画像パッチを受信するステップと、受信された画像パッチを比較するステップと、を有し、前記比較するステップは、各画像パッチから複数の対応関係にある部分画像ペアを抽出するステップと、すべての前記部分画像ペアの間で正規化局所類似度スコアを算出するステップと、すべての前記部分画像ペアの局所類似度スコアの総和を計算して総マッチングスコアを算出するステップと、総マッチングスコアを画像パッチの類似度指標として用いて、総マッチングスコアに基づき、対応関係を持つ類似画像パッチを決定するステップとを有する。
(もっと読む)
同一対象物判定装置および同一対象物判定方法
【課題】複数の画像中に同一の対象物が含まれるか否かを短時間で判定すること。
【解決手段】同一人判定装置は、第1の画像データから顔領域をテンプレートとして抽出するとともに、第1の撮像装置のレンズの焦点と対象物とを結ぶ線を第2の画像へ投影した線(エピポーラ線)を算出する。また、同一人判定装置は、算出したエピポーラ線上で、テンプレートと第2の画像の部分領域とを照合し、照合結果に基づいて第2の画像データ中に同一人が含まれるか否かを判定する。
(もっと読む)
61 - 80 / 526
[ Back to top ]