
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
21 - 40 / 526
被写体3次元領域推定方法およびプログラム
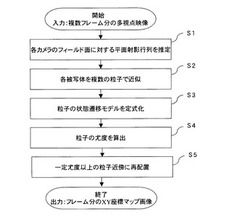
【課題】同期撮影された複数のカメラ映像を統合的に扱うことで、被写体3次元位置推定の精度を向上させる。
【解決手段】初期フレームにおける被写体の3次元世界座標と、複数のカメラで撮影された複数フレームのカメラ画像とから、前記初期フレームにおける被写体の3次元世界座標を特定平面上のXY座標に射影し、前記特定平面上の被写体のXY座標を時間軸情報に基づき推定し、前記特定平面上の被写体のXY座標をカメラ間情報に基づき評価することで、後続フレームにおける被写体の3次元世界座標を推定する。
(もっと読む)
対象物との相対位置計測方法と装置

【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
被写体位置判定方法およびシステム
【解決手段】一実施形態によれば、被写体位置判定方法は、各被写体が複数の特徴を有する複数の被写体を含むデータを分析し、前記データから前記特徴を抽出する工程と、前記データから抽出された各特徴は少なくとも一つの予測に一票を投じるものであり、データベースに保存された特徴と前記データから抽出された特徴をマッチングし、被写体の予測を得る工程と、nを少なくとも一つの整数とし、分析すべき前記被写体がn個のパラメータで記述され、各パラメータがハフ空間の次元を定義する、ハフ空間において分析すべき予測を表す工程と、他の特徴からの投票に合致しない投票よりも、他の特徴からの投票と合致する投票に高く重み付けする制約を与える工程と、前記重み付けされた投票を用いて前記ハフ空間における極大値を得る工程と、前記データ内における前記被写体を位置判定するため、前記極大値と関連付けられた前記予測を識別する工程とを備える。 (もっと読む)
画像処理装置
【課題】予め想定された範囲外の要因が生じた場合でもパラメータの適正化を図ることができる。
【解決手段】テンプレートデータを用いてサーチ画像から対象物を認識するテンプレートマッチング処理を行う画像処理装置19において、テンプレートマッチング処理を行うためのパラメータを記憶するパラメータ記憶部14と、テンプレートマッチング処理における基準性能値を記憶する性能記憶部39と、テンプレートマッチング処理が終わるとその性能値を計測する性能値計測部43とを備え、性能値計測部で計測された性能値が基準性能値を下回る場合に、テンプレートマッチング処理のパラメータを調整する調整部38を備えている。
(もっと読む)
3次元形状推定装置、3次元形状推定方法及び3次元形状推定プログラム
【課題】3次元形状の推定を行うことができる3次元形状推定装置を提供する。
【解決手段】空間の異なる位置から対象物体を撮影する多視点カメラによって撮像した画像から、対象物体の3次元形状を推定する3次元形状推定装置であって、多視点マルチカメラによって撮像した背景画像及び前景画像を入力する手段と、対象物体を含む3次元空間全体をボクセルに分割する手段と、ボクセルを背景画像及び前景画像に投影し、対象物体に含まれる第1の尤度を計算する手段と、ボクセルのそれぞれについて、隣接するボクセルとの間に対象物体の境界面が存在する第2の尤度を計算する手段と、第1の尤度及び第2の尤度を重み係数とする枝をボクセル毎に定義し、グラフを構築する手段と、構築されたグラフに対し、最小グラフカットを計算することにより対象となるボクセル集合を計算する手段と、ボクセル集合を対象物体の3次元形状情報として出力する手段とを備えた。
(もっと読む)
画像処理装置
【課題】被写体の画像だけでは読み取れないような撮影者の様子も画像に反映させることのできる画像処理装置を提供する。
【解決手段】被写体像を撮影した第1画像データを得る前方撮影部1aと、撮影者像を撮影して第2画像データを得る公報撮影部1bと、第1画像データ又は第2画像データを処理して、被写体像又は撮影者像の態様を検出する態様判定部3と、被写体像又は撮影者像の態様に応じて、第1画像データ及び第2画像データを処理する画像合成及び処理部7と、を備える
(もっと読む)
情報処理システム
【課題】サーバーの処理負荷をより軽減させた情報処理システムを提供する。
【解決手段】被写体を撮像して画像データを取得する撮像部11を備えた端末10と、撮像部11による撮像により取得された画像データに基づいて被写体を識別するサーバー110とを備える情報処理システム1であって、端末10は、画像データに対して所定のフィルター処理を施すフィルター処理部14と、所定のフィルター処理が施された画像データをサーバー110に送信する通信部15と、を備え、サーバー110は、送信された画像データを受信する通信部111と、受信された画像データと被写体の識別のための照合用データとの照合の結果に基づいて被写体を識別する制御部112と、を備える。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】認識処理を軽減することを目的とする。
【解決手段】第一の撮像手段で撮像された画像を取得する取得手段と、取得手段で取得された画像から物体領域を検知する検知手段と、画像中の第一の撮像手段と第二の撮像手段との共有領域に、検知手段で検知された物体領域がある場合、共有領域の物体認識処理を画像処理装置で行うか、第二の画像処理装置で行うか否かを判断する判断手段と、判断手段において画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲に設定し、判断手段で第二の画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲から共有領域を除いた領域に設定する設定手段と、設定手段で設定された物体認識範囲に物体が写っているか否か物体認識を行う認識手段と、を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】立体撮影によって得られた画像に対してマルチフレーム合成を行う際に、良好な立体画像を得ることができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】各々異なる複数の視点毎に非同期の状態で連続的に複数回撮影することで得られる前記視点毎の複数の画像を取得する取得手段(S101)と、複数の視点から代表視点を決定する第1決定手段と、代表視点の複数の画像から基準画像を決定する第2決定手段(S103)と、代表視点以外の視点の複数の画像において、代表視点の基準画像と最も類似度の高い画像を代表視点以外の視点毎に基準画像として選択する選択手段(S107)と、視点毎に、各々選択された基準画像をベースに複数の画像の合成処理を行う合成手段(S109、S111)と、を備えた。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
情報処理装置、情報処理方法、および位置情報のデータ構造
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
ステレオカメラのキャリブレーション方法及び情報処理装置
【課題】ステレオカメラのキャリブレーション方法及び情報処理装置において、簡単、且つ、短時間の作業で安定した精度の補正パラメータを生成可能とすることを目的とする。
【解決手段】右及び左カメラのキャリブレーションを行う際、点灯状態の右及び左発光部を撮影可能な位置に配置された反射体に対し、点灯された右発光部を右カメラで撮影した画像の位置座標を点灯された左発光部を左カメラで撮影した画像の位置座標に平行移動させる補正パラメータを求め、点灯された右及び左発光部を右カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、右カメラの撮影画像を回転補正する補正パラメータを求め、点灯された右及び左発光部を左カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、左カメラの撮影画像を回転補正する補正パラメータを求めるように構成する。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
画像照合装置または画像照合方法
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
21 - 40 / 526
[ Back to top ]