
Fターム[5L096CA05]の内容
Fターム[5L096CA05]に分類される特許
41 - 60 / 526
車両検出装置
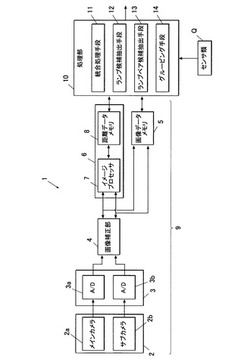
【課題】検出した物体の位置データを的確にグループ化して先行車両等の車両を的確に検出することが可能な車両検出装置を提供する。
【解決手段】車両検出装置1は、画像T上で、統合処理手段11が画像中の画素を抽出して統合した各画素領域gの中から車両のテールランプTLに対応する可能性がある画素領域gをランプ候補gLとして抽出するランプ候補抽出手段12と、位置検出手段9が検出した位置データをグループ化して生成した各グループGについて、ランプ候補gLを含むグループGL同士を再グルーピングした後で、全てのグループG同士を再グルーピングするグルーピング手段14とを備え、再グルーピング処理では、ランプ候補gLを含むグループGL同士の再グルーピングを行う際の閾値Δdp等が、その後の全てのグループG同士の再グルーピングを行う際の閾値Δdp*等よりも、再グルーピングし易い閾値とされている。
(もっと読む)
車両用白線認識装置

【課題】遠方で左右の白線候補点が入り交じった状態においても各候補点を左右に正しく分離することができ、遠方まで白線を精度よく認識することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、左右の白線検出領域A毎に、互いに隣接する白線候補点Pdの連続性を順次判定し、予め設定された連続性を有して所定数以上連続する白線候補点の点群を第1のグループとしてグループ化し、グループ化された白線候補点のみを用いて仮白線近似線Ltを演算する。そして、左右の仮白線近似線Ltを基準とする候補点選定領域Asをそれぞれ設定し、左右の白線検出領域Aで検出した全ての白線候補点Pdの中から各候補点選定呂域As内に存在する白線候補点Pdを最終的な白線候補点Pとしてそれぞれ選定する。
(もっと読む)
車両用白線認識装置
【課題】演算時間を軽減しつつ、精度よく白線近似線を求めることができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、実空間上での白線の概略形状を近似する仮白線近似線の各係数を同定するに際し、前フレームで認識した白線近似線に基づいて低次側係数を同定し、同定されていない複数の高次側係数の組合せを、実空間上に投影された白線候補点Pd毎に当該白線候補点Pdの座標と低次側係数とを用いて複数パターン演算し、最も多く演算された高次側係数の組合せを仮白線近似線Ltの高次側係数として同定する。そして、仮白線近似線Ltを基準とする候補点選定領域Asを設定するとともに、当該候補点選定領域As内に存在する白線候補点Pdを最終的な白線候補点Pとして選定し、選定した白線候補点Pに基づいて白線近似線Lを演算する。
(もっと読む)
物体識別システムおよび方法、並びに、特徴点位置抽出システムおよび方法
【課題】物体にタグを装着することなく、複数視点からのカメラ画像を対象にしつつカメラの視点方向に依存しない物体識別を行う。
【解決手段】物体識別システム1は、複数視点から物体(照合用物体、対象物体)を撮影した画像データから物体の複数の特徴点を抽出する特徴点抽出部22と、複数の特徴点から幾何学的不変量が算出可能な特徴点を選択する特徴点選択部23と、選択された特徴点の位置から幾何学的不変量を算出する幾何学的不変量算出部24と、照合用物体についての幾何学的不変量と対象物体についての幾何学的不変量とを照合することで対象物体を識別する識別部26と、を備える。
(もっと読む)
検出装置及び検出方法
【課題】検出対象を安定して検出することができる検出装置及び検出方法を提供すること。
【解決手段】検出装置100において、交差領域パターン設定部106が、第1の交差領域パターングループの構成パターンを各単位画像ペアに対して順次設定する。各交差領域パターンは、N個(Nは、2以上の自然数)の領域のそれぞれの単位画像内における位置(つまり、単位画像平面の座標)及びサイズ、並びに、各領域が第1単位画像及び第2単位画像の内のいずれに設定されるかを示す設定画像情報によって定義される。そして、検出部108が、特徴量算出部107によって算出される、第1の交差領域パターングループの各構成パターンに関する総合特徴量と、識別器記憶部112に記憶されている、複数の弱識別器から構成される強識別器とに基づいて、検出対象を検出する。
(もっと読む)
画像処理装置およびプログラム
【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
置去り/持去り物体検知装置及び置去り/持去り物体検知方法
【課題】置去り/持去り事象を精度良く判別することができる置去り/持去り物体検知装置及び置去り/持去り物体検知方法を提供する。
【解決手段】背景データ生成部12は、過去の情報の量が異なる2つの背景画像データを生成するとともに、過去の情報の量が異なる2つの背景距離データを生成し、置去り/持去り領域検出部13は、過去の情報の量が異なる2つの背景画像データを比較することにより、一定時間以上変化の継続した領域を検出し、置去り/持去り事象判定部14は、置去り/持去り領域検出部13で検出された領域に対して、過去の情報の量が異なる2つの背景距離データの比較を行い、置去り事象であるか、持去り事象であるかの判定を行う。このように、過去の情報量の異なる2種類の背景画像データ、背景距離データを生成することで精度の良い置去り/持去り検出が可能となる。
(もっと読む)
物体の姿勢を求める方法及びシステム
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
被写体位置計測装置、ディスプレイシステム、および被写体位置計測方法
【課題】被写体位置計測装置および被写体位置計測方法において、撮影人物の頭部等の被写体の一部分の位置を求める際、簡単な方式で上記一部分の位置を安定して求める。
【解決手段】被写体の一部分を球状体と見なして前記一部分の位置を求める。具体的には、装置は、少なくとも2方向からカメラを用いて撮影した被写体の前記一部分の画像のそれぞれにおいて、画像中の前記被写体の輪郭像を抽出する。さらに、前記輪郭像と前記画像中の第1の方向に延びる探索直線とが接する接点位置情報を求めることにより、撮影空間内において、前記カメラから延びて被写体の前記一部分と接する第1仮想直線を前記輪郭像のそれぞれについて求める。さらに、前記撮影空間において、前記第1仮想直線を前記第1の方向に対応する方向に所定の距離それぞれ平行移動した第2仮想直線同士の交点または前記第2仮想直線同士が最接近する点の位置を、前記一部分の中心位置として求める。
(もっと読む)
特徴検出装置、特徴検出方法、およびそのプログラム
【課題】 複数のカメラそれぞれで過去のフレーム結果と比較することで精度よく過去のフレームの結果を引継ぎ、特徴検出処理の処理負荷を低減する。
【解決手段】 ステレオ撮像した第1の映像と第2の映像からマーカを検出する探索ラインを設定し、探索ラインに沿って、第1の映像と第2の映像の両方の現在のフレームからマーカを検出し、フレームから検出したマーカの位置をマーカ情報として記録し、検出中に、検出中のフレームから検出したマーカの位置と、マーカ情報に基づく過去のフレームから検出したマーカの位置とが、予め設定された閾値以内であるか否かを判定し、閾値以内であると判定された数が、予め設定された個数以上であるか否かを判定し、個数以上であると判定された場合に、マーカの検出を中断し、過去のフレームのマーカ情報を現在のフレームのマーカ情報として記録する。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
情報処理装置、情報処理システム及び情報処理方法
【課題】距離画像のノイズに影響を受けにくく、かつ高精度なモデルフィッティングを行うことを目的とする。
【解決手段】物体の幾何的特徴を表す3次元モデルのデータを保存する3次元モデル保存部210と、物体を撮像した2次元画像を入力する2次元画像入力部220と、物体を撮像した距離画像を入力する距離画像入力部230と、2次元画像入力部220から入力された2次元画像から画像特徴を検出する画像特徴検出部250と、距離画像入力部230から入力された距離画像から画像特徴に対応する3次元座標を算出する画像特徴3次元情報算出部260と、画像特徴の3次元座標と3次元モデルとを照合するモデル照合部270とを備える。
(もっと読む)
画像処理装置
【課題】背景の影響を除去して高精度に煙状の物体を検出する。
【解決手段】ステレオカメラの撮像画像を処理する画像処理コントローラと、画像処理コントローラからの情報に基づいて物体の認識処理を行う認識処理コントローラとを基本構成とする画像処理装置において、認識処理コントローラに、煙状の物体を認識可能とするための機能として、対象物領域特定部20a,特徴量抽出部20b,煙判定部20cを備える。対象物領域特定部20aは背景の影響を除去して検出対象となる物体の領域を特定し、特徴量抽出部20bは対象物領域内で煙状の物体を認識するための画像特徴量を抽出し、煙判定部20cは抽出した画像特徴量から対象物領域内の物体が煙状の物体であるかそれ以外の物体であるかを判定する。
(もっと読む)
移動量推定装置および移動量推定方法
【課題】移動体の移動量を精度よく推定する装置または方法を提供する。
【解決手段】移動量推定装置は、投影部、抽出部、推定部を備える。投影部は、移動体に取り付けられた複数のカメラにより得られる各映像についてそれぞれ路面投影像を生成する。抽出部は、投影部により生成される複数の路面投影像において複数のカメラの視野が重複する共通視野領域から、路面投影像間で互いに一致する画像パターンを抽出する。推定部は、抽出部により抽出される画像パターンの時間変化に基づいて、移動体の移動量を推定する。
(もっと読む)
画像処理システム、撮像装置、画像処理装置及びそれらの制御方法、プログラム
【課題】ネットワークカメラと画像処理装置で構成される画像処理システムの物体検出精度を向上させる。
【解決手段】撮像装置は物体の確からしさを示す尤度を検出する。尤度が基準を満たす場合、指定した種類の物体として検出し、特定済の物体情報を生成する。尤度が基準を満たさない場合、暫定の物体情報を生成する。特定済の物体情報あるいは暫定の物体情報を統合した統合物体情報をネットワークを介して画像処理装置へ送信する。画像処理装置は、統合物体情報に含まれる暫定の物体情報によって指定される検出対象の物体領域について尤度を検出し、尤度が基準を満たす場合は、第2物体検出手段で指定した種類の物体として検出し特定済の物体情報を生成する。一方、尤度が基準を満たさない場合は物体情報を生成しない。統合物体情報に含まれる特定済の物体情報と、第2物体検出手段で生成した特定済の物体情報を結合し、特定済の物体情報として出力する。
(もっと読む)
通行車両監視システム
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつトンネル内にどのような車両が存在するのかを把握することができる通行車両監視システムを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、基本監視部24と、メモリ27と、識別情報と、車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、追加監視部25を有し、センタ装置4は、車両の画像から認識された所定の標章についての標章情報を、距離画像に基づいて認識された車両と関連付ける標章情報関連付け部と、標章情報出力部と、を有する。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】相互のズレが画像内で不均一な複数の画像について算出される類似度を向上させる。
【解決手段】画像処理装置であって、第1と第2の画像とを取得する取得手段と、複数の部位で前記第2の画像を局所的に変形した派生画像の画像データを生成する生成手段と、前記第1の画像と前記派生画像との画像データに基づいたパターンマッチング演算によって、前記第1と前記第2の画像との類似度を算出する算出手段とを備える。そして、画素座標が互いに対応する画素として、前記第1の画像の注目画素と、前記第2の画像の対応画素と、前記派生画像の派生対応画素とを定義したとき、前記生成手段は、前記注目画素に対して、前記対応画素を空間的に内包する内包領域を前記第2の画像において設定する手段と、前記注目画素の画素値と、前記内包領域内の複数の画素の画素値との一致度に基づいて、前記派生対応画素の画素値の取得処理を行う画素値取得手段とを備える。
(もっと読む)
表面が変化する対象物を3次元デジタル化する方法
【課題】表面が変化する対象物を3次元デジタル化する方法を提供する。
【解決手段】対象物4の複数の部分的表面を示す複数のカメラ画像を撮影して統合して、対象物4の部分的表面の3次元座標を決定する。複数のカメラ画像は、それぞれの端部において互いに重なり合う。マッチング法により対象物4の部分的表面の3次元座標を照合して統合する。カメラ画像の各々をサブフレーム(1.1〜1.8,2.1〜2.9,3.1〜3.9)に分割する。複数のサブフレームは、それぞれの端部において互いに重なり合い、隣接するカメラ画像に含まれるサブフレームに重複する。サブフレーム(1.1〜3.9)に対して、カメラ画像からそのサブフレームに関連する3次元座標を割り当てる。マッチング法によりサブフレーム(1.1〜3.9)の3次元座標を照合して統合する。この方法を数回繰り返して実行する。
(もっと読む)
画像処理装置及び方法、並びに画像表示装置及び方法
【課題】局所的に異なる動きベクトルが誤って検出されてしまい、動きベクトルが正しく検出できない。
【解決手段】各画像部分についての前記第一の動きベクトル(MV1=V5)と当該画像部分の周辺の画像部分についての前記第一の動きベクトル(V1〜V4,V6〜V9)との中で、各動きベクトルごとにその動きベクトル自身と他の動きベクトルとの距離の総和を計算し、該総和が最小となる動きベクトルを、第二の動きベクトル(MV2=V’5)として出力する(3、23)とを備える。
(もっと読む)
41 - 60 / 526
[ Back to top ]