
Fターム[5L096DA02]の内容
Fターム[5L096DA02]に分類される特許
61 - 80 / 507
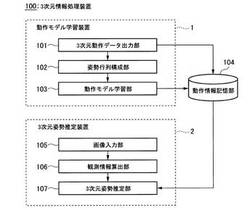
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
硬貨分類装置および硬貨分類方法

【課題】貨幣の画像照合精度を高めるとともに、貨幣の微細な特徴を効率的に照合することを課題とする。
【解決手段】金種識別処理部が硬貨の金種を取得し、取得した金種を受け取った第1の真偽識別処理部が硬貨の真偽識別処理をおこなうよう構成する。そして、年代識別処理部が硬貨の発行年を識別し、第2の真偽識別処理部が、先に識別された金種および発行年を用いて特徴テーブルを検索して特徴部テンプレート画像と特徴範囲とを取得し、特徴部テンプレート画像と入力画像の対応部分とを照合するよう構成する。さらに、真偽判定部が、第1の真偽識別処理、年代識別処理および第2の真偽識別処理の処理結果に基づいて、硬貨の真偽を判定するよう構成する。
(もっと読む)
文字存在判断方法、文字存在判断装置及び文字存在判断プログラム
【課題】窓領域画像と基準画像との間に位置ズレがある場合等であっても、所定の領域に文字が存在するか否かを判断することを可能とする文字存在判断方法を提供する。
【解決手段】基準画像から窓領域画像を差し引いて差分画像を算出し、差分画像の第1辺エリアの平均値と差分画像の第1辺エリアと対向する第2辺エリアの平均値との差分絶対値が第1閾値を超え第2閾値未満であるかを判断する第1判断ステップと、差分画像の真中横エリアの平均値が第3閾値を超え且つ差分画像の真中横エリアの標準偏差が第4閾値を超え又は差分画像の真中縦エリアの平均値が第5閾値を超え且つ差分画像の真中縦エリアの標準偏差が第6閾値を超えるかを判断する第2判断ステップと、第1判断ステップの判断結果が否定的で且つ第2判断ステップの判断結果が否定的であれば、窓領域画像に文字が存在していないと判断する。
(もっと読む)
画像処理装置、撮像装置、及びそれらの制御方法
【課題】映像中の対象物の動きの質に応じて、撮像時のボケの低減とランダム感の抑制とを両立可能な技術を提供する。
【解決手段】画像処理装置は、動く対象物を撮像した映像信号であって、前記対象物のぶれを含まない第1の映像信号と前記対象物のぶれを含む第2の映像信号とを入力する入力部と、映像信号を解析して前記対象物の動きを検出する動き検出部と、検出された動きの質に応じて、前記第1の映像信号と前記第2の映像信号を切り換え又は合成することにより出力映像信号を生成する出力制御部と、を有する。出力制御部は、等速度又は等加速度の動きである場合には第1の映像信号を、等速度又は等加速度の動きでない場合には第2の映像信号を出力する。或いは、等速度又は等加速度の動きでない場合には、等速度又は等加速度の動きである場合に比べ、第2の映像信号の重みを大きくする。
(もっと読む)
画像表示装置、及び、プログラム
【課題】 ユーザの感情の変化に合わせて臨機応変に表示する画像を切り替えることのできる画像表示装置及びプログラムを提供する。
【解決手段】 複数の画像の中から予め定められた時間間隔毎に選択した画像を切り替えて表示部に表示させる画像表示装置において、表示部に表示された画像を閲覧する閲覧者の顔位置を含む範囲を撮影する撮影手段と、撮影手段による閲覧者の撮影データに基づいて閲覧者の顔の表情を認識する表情認識手段と、表情認識手段による認識結果に基づいて表示部に表示されている画像に対する閲覧者の好感度を示す好感度指標を設定する設定手段と、設定手段により設定された好感度指標を画像と関連付けて記憶する好感度記憶手段と、好感度記憶手段に記憶された好感度指標に基づいて表示部に表示させる画像を選択する制御手段と、を備えている。
(もっと読む)
進化的条件判断ネットワーク
【課題】条件判断木(決定木)を発展させた条件判断ネットワークを進化計算により最適化する方法に関する。
【解決手段】参照ブロック画像判定の経路が、ノード1、ノード3、ノード4、ノード6となった場合に、対象ブロック画像判定のノード4では、参照ブロック画像経路と重複するので、初期値である標準閾値に代えて作用閾値を用いて、対象ブロック画像の特徴量である中央値につき条件判断する。ノード5では、参照ブロック画像経路と重複しないので、初期値である標準閾値を用いて、対象ブロック画像の最頻値につき条件判断する。そして、終端で評価値を特定する。この条件判断ネットワークを進化計算アルゴリズムにより学習する。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
情報端末装置
【課題】撮像画像を元に複数の人物の人間関係を容易かつ高い精度で推定できる情報端末装置を提供すること。
【解決手段】特徴量DB14は、人間関係を推定する判断基準となる顔についての特徴量を人間関係ごとに蓄積する。推定部12は、撮像部11から入力された画像から顔についての複数の特徴量を抽出し、抽出された複数の特徴量の各々における尤度を特徴量DB14に蓄積された顔についての特徴量を用いて人間関係ごとに算出し、算出された複数の尤度を統合して人間関係を推定力する。制御部13は、推定部12での推定結果に従って記憶部15から表示情報を読み出し、表示部16に表示させる。
(もっと読む)
ヒューマンコンピュータインタラクションシステム、手と手指示点位置決め方法、及び手指のジェスチャ決定方法
【課題】HCIシステムにおける手と手指示点の位置決め方法及び手指のジェスチャ決定方法を提供する。
【解決手段】手位置決め方法は、被制御領域の画像を連続取得して、前景物が含まれる画像列を取得する段階と、撮像した前記画像から前景画像を抽出し、抽出した前記前景画像の2値化処理を行って、2値化前景画像を生成する段階と、前記2値化前景画像の最小凸包の画素頂点集合を取得し、該最小凸包の各画素頂点を中心点に、手が含まれる候補領域として関心領域を構築する段階と、構築した前記各関心領域から手画像特徴を抽出し、パターン認識方法により、前記候補領域における前記手が含まれる関心領域を決定する段階とを含む。
(もっと読む)
移動ロボットの遠隔操縦のための衝突防止装置及び方法
【課題】遠隔操縦のための衝突防止装置及び方法に係り、ユーザに移動ロボットの移動に関する情報を容易に伝達する。
【解決手段】移動ロボットに装着されたカメラで撮影した映像を所定の時間差で保存して比較してオプティカルフローを計算し、FOEを計算する。また、移動ロボットの移動速度及び移動方向についての情報を獲得する。計算されたFOEと、移動速度及び移動方向と、を利用して、移動ロボットの走行方向に存在する障害物を感知し、感知された障害物に衝突するまでに要するTOCを計算し、そのTOCを利用して障害物に移動ロボットが衝突する可能性がある衝突予想領域を計算する。その計算結果に基づいて、画面に表示される衝突予想領域にマッピングするカラーの情報を生成する。具体的には、計算されるTOCの値によってカラーの色調を調整し、TOCの値が小さければカラーの点を濃くし、TOCの値が大きければカラーの点を薄くする。
(もっと読む)
医療情報表示装置および方法、並びにプログラム
【課題】所望の医療情報を、より直感的な操作で、より容易に取得可能にする。
【解決手段】取得条件入力用ユーザインターフェース32が、被検体外観画像(人体アイコン45)の表示中に、ジェスチャの入力を受け付け、取得条件特定部35が、ジェスチャ種別解析部33によって判別されたそのジェスチャの種別、および、ジェスチャ部位解析部34によって特定されたそのジェスチャに対応する被検体の部位に基づいて、そのジェスチャに対応する医療情報を取得するための医療情報取得条件を特定し、医療情報取得部36が、特定された医療情報取得条件を満たす医療情報を、複数件の医療情報を記憶する医療情報データベース53から選択的に取得し、医療情報表示制御部36が、取得された医療情報を表示手段に表示させる。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、測定を迅速且つ確実に行うことのできる画像測定装置及び画像測定方法を提供する。
【解決手段】ワークを撮像する撮像ユニット17と、撮像されたワークの画像を取り込む取り込みプログラム431と、取り込まれた画像を2値化する2値化プログラム433と、2値化された画像内に存在する図形情報を認識し、当該図形情報の輪郭線を検出する輪郭線検出プログラム434と、検出された輪郭線に基づいて図形情報の角点を検出する角点検出プログラム436と、検出された角点を含む輪郭線上に、エッジ検出ツールを設定する設定プログラム437と、設定されたエッジ検出ツールにより、図形情報の測定を行う測定プログラム438と、を備える。
(もっと読む)
コンテンツ表示システムおよびコンテンツ編成装置
【課題】表示時間だけでなく、混雑状況に応じて、細かな変更を行うことができるコンテンツ表示システムを得る。
【解決手段】店舗等の所定領域内の混雑状況を判定する混雑レベル判定装置200と、1又は複数の編成開始時間及び終了時間を定めた複数のタグ情報から、混雑レベル判定装置200が判定した混雑状況のレベルに基づいてタグ情報を選択し、選択したタグ情報に基づいてコンテンツ記憶部が記憶するコンテンツデータから、コンテンツを再編成した新たなコンテンツデータを作成する配信装置300と、新たなコンテンツデータに基づいてコンテンツを表示する表示装置100とを備える。
(もっと読む)
エスカレータ搭載負荷量計測方法及び装置
【課題】既設のカメラで撮影した監視画像をそのまま流用することで、簡便にエスカレータの搭載負荷計測が行えるようにすること。
【解決手段】監視カメラの撮影画像を利用して、搭載した人数に相当した混雑度を計測する。人物が写っている評価対象データから静止画を切り出す。あらかじめ用意した背景画像と評価対象画像との差分処理を行う。差分処理によって抽出した画像データのピクセル数をカウントする。このピクセル数は、画像データ中で人物部分が占める面積であり、これを混雑度とする。目視により、評価画像に映っている人数をカウントし、面積と人数の相関性を確認する。オンライン時に、一定周期毎に画像を切り出し、各静止画像の混雑度を示す面積を求め、その面積を積算する。積算された面積値があらかじめ定めた一定値に達した場合、点検時期の告知あるいは警報などの形で出力する。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
表情学習装置、表情認識装置、表情学習方法、表情認識方法、表情学習プログラム及び表情認識プログラム
【課題】表情のカテゴリの認識のみならず、表情の動的性質についても認識可能とする。
【解決手段】時系列の画像データから顔面上の複数の特徴点の位置情報を出力する入力手段と、複数の特徴点の位置情報を、表情のカテゴリ空間に射影することにより、カテゴリ空間座標を求めるカテゴリ埋め込み手段と、複数の特徴点の位置情報を、表情の動的性質空間に射影することにより、動的性質空間座標を求める動的性質埋め込み手段と、予め記憶されているカテゴリ多様体情報を参照して、カテゴリ空間座標が属するカテゴリ多様体情報を特定することにより表情認識対象人物の表情のカテゴリを推定するとともに、予め記憶されている動的性質多様体情報を参照して、動的性質空間座標が属する動的性質多様体情報を特定することにより表情認識対象人物の表情の動的性質を推定する表情認識手段とを備える。
(もっと読む)
空模様判定システム及び空模様判定方法
【課題】安易且つ平易に空模様を判定すること。
【解決手段】空を撮影する撮像装置と前記撮像装置で撮影された撮像画像から空模様を判定する空模様判定装置とを備えた空模様判定システムにおいて、前記空模様判定装置は、前記撮像画像を入力して画像記憶手段に記憶する画像入力手段と、前記撮像画像を前記画像記憶手段から読み出して、前記撮像画像の画像データを用いて彩度及び明度を計算する特徴量計算手段と、計算された前記彩度及び前記明度に基づいて前記撮像画像の空模様を判定する空模様判定手段と、を有することを特徴とする空模様判定システム。
(もっと読む)
顔画像評価方法、顔評価方法および画像処理装置
【課題】顔画像に基づいてその顔の美観を客観的に定量化することのできる顔画像評価方法を提供する。
【解決手段】規格化された顔画像(被験者画像)と対比画像のテクスチャを主成分分析して複数次の基底ベクトルの重み係数を算出し、低次側の一部の重み係数の近接度に基づいてテクスチャの大域的な見た目の印象の一致度を評価し、高次側の一部の重み係数の近接度に基づいてテクスチャの局所的な見た目の印象の一致度を評価する。被験者画像と対比画像との重み係数の近接度はユークリッド距離に基づいて算出することができる。
(もっと読む)
監視装置、監視プログラム及び監視方法
【課題】監視対象とするエリアに移動体が出現する場合でも、撮像部に対する妨害を適切に検知することを課題とする。
【解決手段】監視装置1は、静的領域抽出部1aと、撮像妨害判定部1bとを有する。このうち、静的領域抽出部1aは、所定の監視対象を撮像する撮像部により時系列に撮像された複数の画像から各画像内で被写体の映り方が変化しない領域を静的領域として抽出する。さらに、撮像妨害判定部1bは、撮像部により撮像された画像全体の領域のうち静的領域抽出部1aにより抽出された静的領域を用いて、撮像部に対する撮像妨害が行われたか否かを判定する。
(もっと読む)
物体検出装置
【課題】人の出入りが多いエリアなど、画像の変化が頻繁に発生する監視エリアにおいて、放置された物体などを精度よく検出する技術を提供することを目的とする。
【解決手段】物体検出装置はカメラから入力された撮像画像から背景画像を生成する。また、撮像画像と背景画像の差分画像の分散を算出し、人物を検出する。物体検出装置は、定期的に背景画像の更新を行うが、人物を検出すると背景画像の更新を中断し、人物を検出しなくなったところで物体の検出処理を行う。物体の検出処理は、現在の画像と背景画像の輝度差分画像を作成し、輝度差分画像から孤立点を除去し、さらに、過去複数フレームの輝度差分画像の論理積画像を作成する。そして、論理積画像から物体領域を抽出する。最後に物体領域について現在のカラー画像と背景のカラー画像の色相を比較し、物体の有無を判定する。
(もっと読む)
61 - 80 / 507
[ Back to top ]