
Fターム[5L096EA07]の内容
Fターム[5L096EA07]に分類される特許
21 - 40 / 59
走行路推定装置及びプログラム
【課題】高さ情報を用いて道路と道路外領域の境界を高精度に検出し、路面マーカーが存在しない道路における走行路推定を可能にする。
【解決手段】ステレオ画像における一方の画像中の全点が道路平面上に存在すると仮定してもう一方の画像における見え方に変換した変換画像と実際に入力した画像との間の類似性を調べることで、道路面とは高さが異なる路肩候補点を検出し、得られた路肩境界候補点を道路面へ逆投影した逆投影路肩候補点画像中で路肩候補点を中心として探索原点と路肩候補点とを結ぶ直線上に設けられた2つの領域内における路肩候補点数の関係から真の路肩点を選択して走行路を推定する。
(もっと読む)
差分抽出装置及び差分抽出プログラム

【課題】原稿に修正を加えていなくても画像間の差異が抽出される可能性を低減させる。
【解決手段】無効領域特定部30は、修正前後のいずれかの画像から、差分抽出処理の結果として有効な処理結果が得られない画像種別に該当する画像の領域を抽出し、その抽出した画像領域を無効領域として特定する。差分抽出部40は、修正前画像及び修正後画像の両画像の無効領域を除いた領域(有効領域)から全体位置歪み補正のための特徴点を抽出し、その抽出した特徴点を用いて修正後画像の位置歪みを補正し、修正前画像と位置歪み補正後の修正後画像を比較することで差分抽出画像を生成する。画像出力部50は、無効領域を視認可能に差分抽出画像を出力する。
(もっと読む)
立体物検出装置およびその方法
【目的】単眼カメラによる撮影画像に影が存在する場合においても、影を立体物と誤認識せず、立体物を正確に検出できるようにし、接触事故や人身事故を防止する「立体物検出装置およびその方法」を提供することにある。
【構成】単眼カメラにより任意の時刻t1と該時刻t1より所定時間経過した時刻t2におけるそれぞれの撮影画像を視線変換した俯瞰画像を取得し、一方の俯瞰画像を自車の移動量に基づいてシフトしたシフト画像とシフトしていない俯瞰画像との第1差分画像を算出し、該時刻t1およびt2の自車影画像を算出し、一方の自車影画像を自車の移動量に基づいてシフトしたシフト影画像とシフトしていないシフト影画像との第2差分画像を算出し、該第1差分画像と該第2差分画像との差分である第3差分画像を算出し、該第3差分画像に残存差分が存在する場合には立体物が存在すると判断する。
(もっと読む)
平面領域推定装置及びプログラム
【課題】パターンのない領域があっても、推定対象平面を表わす領域を精度よく推定する。
【解決手段】撮像装置12によって、異なる位置姿勢で第1の画像及び第2の画像を撮像し、画像変換部32によって、射影変換行列によって第1の画像を変換する。差分計算部34によって、変換画像と第2の画像との各画素の差分を算出し、平面候補領域検出部36によって、複数の閾値の各々を用いて、階層構造で表わされる複数の道路平面候補領域を検出する。そして、平面領域判定部38によって、最も大きい閾値から降順に、閾値を用いて検出された道路平面候補領域のうち、道路平面のみを表していないと前回判定された道路平面候補領域内の道路平面候補領域の各々について、道路平面のみを表わしているか否かの判定を順次行う。領域統合部40によって、道路平面のみを表わしていると判定された道路平面候補領域を統合して、道路平面領域を推定する。
(もっと読む)
動きベクトル算出装置、障害物検出装置および動きベクトル算出方法
【課題】1台のカメラのみを用いて障害物を検出する場合、車両が低速走行しているときでも、車両の動きベクトルを正確に算出することを可能にする「動きベクトル算出装置、障害物検出装置および動きベクトル算出方法」を提供する。
【解決手段】車載カメラ140によって撮像された車両周囲画像内の予め定めた位置の部分画像をトラッキング対象画像として抽出するトラッキング対象画像抽出部340と、当該複数の車両周囲画像のそれぞれにおいて位置検出部360が検出したトラッキング対象画像の位置の変化に基づいて車両の動きベクトルを算出する動きベクトル算出部380とを備え、車速センサの検出結果を使用しなくても、画像処理によって車両の動きベクトルを算出することができるようにする。
(もっと読む)
エッジ抽出装置、測量機、およびプログラム
【課題】対象物の輪郭以外のノイズ検出を低減すると共に、その操作性を向上する。
【解決手段】
エッジ抽出装置は、画像からエッジ強度を算出してエッジ検出を行うエッジ検出部と、エッジ検出部が検出したエッジをラベリング処理し、かつ、エッジの長さを求めるラベリング処理部と、ラベリング処理部が求めたエッジの長さとエッジ検出部が算出したエッジ強度とを対応付けた値によってエッジの強調処理を行うエッジ強調処理部と、エッジ強調処理部によって強調された画像に対して、調整可能とされる閾値により2値化処理を施し、エッジを抽出するエッジ抽出部とを備える。
(もっと読む)
障害物認識装置
【課題】撮影画像の簡単な処理により精度よく確実に路面に垂直な障害物を認識する。
【解決手段】走行する自車1の撮影手段3が撮影した略同じ路面領域についての異なる複数方向からの撮影画像を画像処理手段4の画像取得手段により取得し、画像処理手段4の微分2値化手段、膨張手段により、取得した各撮影画像を微分2値化画像に変換して線幅を広くし、さらに、画像処理手段4の演算手段、収縮手段により、膨張した画像間の異なる部分の画像を収縮して線幅を元に戻し、路面に垂直な障害物の画像部分のみが残った画像を形成し、この画像に基づき、画像処理手段4の認識手段により障害物を認識する。
(もっと読む)
一致度計算装置及び方法、プログラム
【課題】入力画像の対象物対応領域がテンプレート画像の対象物領域と比べて変形している場合や、入力画像にノイズが重畳している場合でも、対象物を正しく検出することができる(検出したかどうかの判断が可能となる)一致度を計算する。
【解決手段】入力画像と、対象物のテンプレート画像とを対比し、入力画像とテンプレート画像との一致度を計算する一致度計算装置であって、入力画像を、テンプレート対象物領域と整合するように変形する変形手段と、変形後の入力画像とテンプレート画像との一致度を計算する手段とを備え、前記変形手段は、入力画像の対象物対応領域において、テンプレート対象物領域の形状に合わせて非背景領域を整形する手段と、入力画像の対象物非対応領域において、テンプレート対象物対応領域に接する非背景領域を、前記一致度に影響を与えないように設定する処理手段と、を備える。
(もっと読む)
棚割再現方法、棚割再現プログラム、棚割評価方法、棚割評価プログラム及び記録媒体
【課題】商品の陳列状態を表す棚割モデルを、短時間で精度良く作成することができる棚割再現方法、棚割再現プログラム、棚割評価方法、棚割評価プログラム及び記録媒体を提供する。
【解決手段】カメラで売場の写真を撮影し(ステップS1)、その売場写真の画像データを、コンピュータに取り込み、画像記憶部等に記憶させる(ステップS2)。コンピュータを使用し、売場写真の写真画像に対して色補正、サイズ補正及びは歪み補正等を行う(ステップS3)。写真画像中の各商品について、コンピュータの商品マスター記憶部に記憶された商品マスターとのマッチング処理を行い、個々の商品を識別する(ステッS4)。マッチング処理により選択された商品マスターを、什器モデルの対応する位置に配置し(ステップS5)、棚割モデルを完成する(ステップS6)。
(もっと読む)
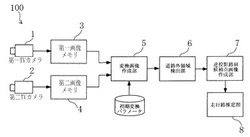
車線認識装置、車線認識方法および車線認識プログラム
【課題】原画像と鳥瞰画像のそれぞれで発生しやすいノイズを抑制し、車線の認識精度を向上する車線認識装置を提供する。
【解決手段】車線認識装置10は、複数の異なる時刻における原画像を基に合成鳥瞰画像を生成する合成鳥瞰画像作成手段130と、原画像から車線区画線候補を検出する区画線候補検出手段120と、合成鳥瞰画像において車線区画線候補が区画線として適しているか否かを検定する区画線候補検定手段140とを有する。別の車線認識装置11は、原画像から鳥瞰画像を作成する鳥瞰画像作成手段1020と、複数の異なる時刻における原画像を基に合成鳥瞰画像を生成する合成鳥瞰画像作成手段1030と、鳥瞰画像と合成鳥瞰画像とを基に第2合成鳥瞰画像を作成する第2合成鳥瞰画像作成手段1040と、第2合成鳥瞰画像から車線区画線の候補となる線の位置を検出する区画線候補検出手段1050とを有する。
(もっと読む)
運転支援システム、車両、立体物領域推定方法
【課題】単眼カメラを用い、画像処理によって立体物領域(障害物領域)を推定する。
【解決手段】車両に設置されたカメラから時刻t1及びt2のカメラ画像を取得し、それらを時刻t1及びt2の鳥瞰図画像に変換する。時刻t1のカメラ画像から複数の特徴点を抽出すると共に第1及び第2のカメラ画像間における各特徴点の移動ベクトルを検出し、各特徴点と各移動ベクトルを鳥瞰図座標面上へマッピングする。鳥瞰図画像上の2以上の特徴点に着目し、その着目特徴点の位置及び移動ベクトルを地面特徴点が満たすべき拘束式に当てはめることで着目特徴点が地面特徴点であるか否かを判別する。そして、地面特徴点であると判別された2以上の特徴点についての位置情報及び移動ベクトル情報から車両の移動情報を求め、その移動情報を用いて時刻t1とt2の鳥瞰図画像の差分をとることで立体物領域を推定する。
(もっと読む)
階層型構成要素ベースの物体認識
【課題】相互に相手を基準に移動可能な任意数の部分からなる可能性のある、イメージ中の物体を認識するための方法を提供する。
【解決手段】オフライン段階では、本発明は一連の例示イメージから単一の物体の部分の相対的な動きを自動的に学習し、単一の物体の部分の記述、部分間の関係、および効率的な検索戦略を組み込んだ、階層型モデルを構築する。これは、例示イメージ中の単一の物体の部分のポーズ変化を解析することによって実行される。ポーズは、物体認識に関する任意の類似性尺度によって取得できる。オンライン段階では、本発明は、階層型モデルを使用して検索イメージ中の物体全体を効率的に見つける。オンライン段階中には、物体の有効なインスタンスのみが見つけられ、すなわち、物体の部分は全体イメージ中ではなく、効率的な検索を容易にしてその後の妥当性検査ステップを不要にする階層型モデル内の物体部分間の関係によって定義される、パラメータスペースの制限された部分でのみ検索される。
(もっと読む)
画像特徴抽出装置,画像特徴抽出方法,画像特徴抽出プログラム及びそのプログラムを格納した記録媒体、画像類似度計算装置,画像類似度計算方法,画像類似度計算プログラム及びそのプログラムを記録した記録媒体
【課題】特徴抽出におけるエッジ処理において、照明の変動を受けやすい、はずれ値の影響を受けやすい、精度が向上しない。
【解決手段】入力画像データD11に対して画像補正を行い、該補正された画像を出力する(11)。次に、前記補正された画像の各画素位置に対して、方向毎の変化をグラジエントベクトルとして計算し出力する(12)。そして、前記計算されたグラジエントベクトルに対して、グラジエントベクトルの大きさ,向きのいずれかを変化させる非線形処理を行って画像特徴D12を抽出する(13)。
(もっと読む)
白線検出装置および白線検出方法
【課題】車両の周囲の路面を撮像して得られた撮像画像から、路面上に描かれた白線を精度良く検出できるようにする。
【解決手段】画像変換部21が、路面の撮像画像を、路面を真上方向から見た俯瞰画像に変換し、白線候補画素検索部22が、俯瞰画像において路面に描かれた白線を示す白線候補画素を検索し、白線検出部23が、白線候補画素から近似直線を求める際に、撮像画像を俯瞰画像に変換する際に生じる誤差影響を除外するように白線候補画素の重み付けを調整し、重み付け調整後の白線候補画素から求めた近似直線に基づいて白線を検出することで、路面に描かれた白線を精度良く検出できるようにした。
(もっと読む)
画像識別学習装置及びそれを用いた印刷物識別装置
【課題】 画像識別のためのパタン識別機を学習する際には,多数の学習サンプルが必要となる。学習サンプルの質および数が識別機の性能を決める大きな要因になるが,多数の学習サンプルを収集するためには高いコストがかかるという問題があった。
【解決手段】 本発明は,画像識別機の学習において,少数の学習サンプルから多様なバリエーションを持つ学習用サンプルを生成することを目的とし,入力画像を受け付ける入力手段と,対象の変化度合いを表すパラメタまたは撮像系を表すパラメタを入力する入力手段を備え,内臓する画像変化モデルにより,上記対象が質的に変化したときの画像または撮像系の変化により撮影画像が変化したときの画像を合成する手段を用いて,少数の学習用画像から多数の学習用画像を生成し,生成された学習用画像を用いて画像識別機を学習する。
(もっと読む)
画像対応付け装置及び画像対応付け方法並びに画像対応付けプログラム
【課題】 画像の同期的対応付けを自動化することができる画像対応付け装置及び画像対応付け方法並びに画像対応付けプログラムを提供する。
【解決手段】 OHPファイルと、OHPファイルを用いた講義等をカメラ撮影した動画像とにおいて、各OHPファイルと動画像を構成するフレーム画像に含まれるOHP画像領域との類似度を算出し、算出された類似度に基づいてOHPファイルとフレーム画像とを各々対応付ける。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】単眼カメラで撮影した画像から変化画素を含む矩形の領域を抽出する領域抽出処理機能を有する画像処理装置において、安定した精度の高い変化画素領域の抽出が可能な閾値の自動設定機能を実現する。
【解決手段】カメラで撮影した画像を順次入力し、入力した現在画像と過去画像から変化画素を含む領域を抽出する領域抽出処理手段を備えた画像処理装置において、前記領域抽出処理手段に、前記入力した一定期間内の複数の画像を対象に、画素あたりの輝度平均値と標準偏差を算出する算出手段と、前記算出手段が算出した画素毎の標準偏差を、前記変化画素を抽出するための対応する画素の閾値に設定する閾値設定手段と、を具備する。
(もっと読む)
白線認識装置及び方法
【課題】車線維持支援システム等に用いられる白線認識装置において、白線の幅が通常とは異なる場所においても、正確に白線を認識する。
【解決手段】白線認識装置は、車両が走行する走行路の画像を撮像する撮像手段(110)と、撮像された画像に基づいて、走行路における白線の幅に対応するものとして設定されている閾値との比較により、白線を認識する画像処理手段(120)と、走行路に関する所定種類の情報を取得する情報取得手段(130)と、取得された情報の内容に応じて、設定されている閾値を変更する閾値変更手段(150)とを備える。
(もっと読む)
画像検出装置、プログラム及び画像検出方法
【課題】 従来のテンプレートマッチング処理は、単純にテンプレートと類似した画像を検索するため、誤検出が多くなる問題がある。本発明は、人物などの左右対称性のある物体形状を正確に検出する画像検出技術を提供することを目的とする。
【解決手段】 撮影装置1で撮影した画像から、検出対象候補検出手段3においてテンプレートマッチングにより検出対象候補を検出する。対称画像生成手段4において、検出対象候補の画像を画像の中央縦線で2分割し、一方の画像を反転させる。対象性検出手段6において、反転画像と他方の画像を比較し、対称画像の類似度を算出し、類似度と閾値を比較して左右対称性のある画像を検出する。
(もっと読む)
画像の輪郭抽出方法、画像からの物体抽出方法およびこの物体抽出方法を用いた画像伝送システム
【課題】自己相似写像を用いる物体領域抽出方式の処理を高速にする。
【解決手段】シェイプデータの輪郭部分に探索基準ブロックを設定する第1のステップと、各探索基準ブロック毎に画像データの図柄が相似であり、かつ、ブロックサイズがそれよりも大きい相似ブロックを同じ画像の中から見つける第2のステップと、各探索基準ブロック内の画像を二値化したデータを各々対応の相似ブロックのシェイプデータと置き換える第3のステップとから成り、第3のステップを所定の回数繰り返すことによりシェイプデータの輪郭線を前記物体の輪郭線に一致させる輪郭抽出処理において、輪郭抽出処理を反復して行い、その反復の初めには画像データとシェイプデータと探索基準ブロックは縮小して輪郭位置補正処理を行うようにする。
(もっと読む)
21 - 40 / 59
[ Back to top ]