
Fターム[5L096EA13]の内容
Fターム[5L096EA13]に分類される特許
1 - 20 / 157
画像認識装置、画像認識装置の制御方法、およびプログラム
物体判別方法
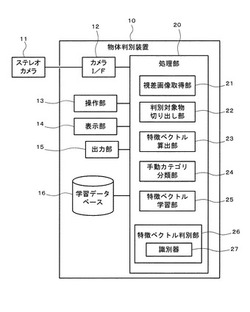
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
画像認識装置及び方法

【課題】複数の対象を含む画像における各々の対象が何であるかを高精度で認識し、且つ各対象の存在する場所をも認識する画像認識装置を提供する。
【解決手段】部分領域抽出部11において、入力画像から矩形の候補領域を複数抽出し、各々を対象画像として、画像認識部12にて何であるかを認識させ、候補リストを得る。当該候補リストに挙げられた各々の対象について再度、再判定認識部13において対象画像が表す対象であるかを認識させて、最終的な認識結果となすよう、画像認識装置1を構成する。対象の位置は、部分領域抽出部11において抽出した矩形の位置として得られる。部分領域抽出部11で採用する画像特徴量よりも、再判定識別部で採用する画像特徴量を高精度にすることで、ある程度候補リストを絞り込んだ上で、少ない計算負荷によって高精度な認識結果が得られる。
(もっと読む)
画像処理装置、直線検出方法及びコンピュータプログラム
【課題】読み取った画像から原稿の境界を精度よく検出することが可能な画像処理装置、直線検出方法、コンピュータプログラムを提供する。
【解決手段】情報処理装置20は、入力画像からエッジ画素を抽出するエッジ画素抽出部210と、抽出したエッジ画素からハフ変換を用いて直線候補を抽出する直線候補検出部221と、直線候補から所定距離内にあるエッジ画素に対して最小二乗法を用いて直線を検出する直線検出部222と、を有する。
(もっと読む)
ジェスチャ認識装置及びそのプログラム
【課題】ジェスチャにより入力された多種類の図形を簡単なアルゴリズムで短時間に認識できるようにし、これによりリアルタイム性の向上を図る。
【解決手段】指位置蓄積部25に格納されたジェスチャの開始から終了までの間の描画点の位置座標の集合をもとに描画軌跡を表す画像を作成し、この描画軌跡を表す画像を含む最小の矩形領域を枠パターンを用いて切り取る。そして、この切り取られた描画軌跡を含む最小面積の矩形領域画像のサイズを正規化したのち、この矩形領域画像をもとにSVM using DtB を応用した認識アルゴリズムにより上記描画軌跡により表される図形を認識する。この認識処理は、矩形領域画像の4辺を一辺ずつ順に選択し、選択された辺から描画軌跡までの距離情報(DtB 情報)を算出してSVMモデルに入力することにより図形を識別する処理を、該当する図形が認識できるまで繰り返すことで行われる。
(もっと読む)
画像比較装置および画像比較プログラム
【課題】画像比較検査を容易且つ正確に実施することのできる画像比較装置および画像比較プログラムを提供する。
【解決手段】画像比較装置10は、基準となる画像と検査対象となる画像とを略同一の解像度で読み取ることにより、第1の画像データと第2の画像データとを生成する画像読取手段11,16と、第1の画像データおよび第2の画像データを画面上であおり表示する画像表示手段11,12と、第1の画像データと第2の画像データとを比較することで両画像データ間での差異を検出し、差異が所定の閾値を超えた場合に当該差異の存在する領域に相違点があると判断してあおり表示されている画像データ上にマーキング表示を行う相違点抽出手段11と、を備えており、画像データ上に表示されるマーキングが、ポインティングデバイス15の操作によって追加・削除自在に構成されている。
(もっと読む)
自動認識処理システム、情報処理端末、自動認識処理方法、及びプログラム
【課題】コストをかけずに、数多くの種類の対象物を精度よく自動認識することが可能な自動認識処理システム等を提供する。
【解決手段】撮影部25であるカメラを起動すると、情報処理端末3は発光体11の明滅周期をサーバ5から受信、設定し、対象物9の動画撮影を開始する。情報処理端末3は、前後の撮影画像31から差分画像32を生成してシンボル認識処理を行い、差分画像32内にシンボル候補が4点あるか判定する。シンボル認識処理の認識結果が成功すると、情報処理端末3は差分画像32から認識領域33を抽出し、サーバ5に送信する。サーバ5は、情報処理端末3から受信した認識領域33のデータベース照会処理を行う。情報処理端末3は、サーバ5からデータベース照会の結果を受信し、データの表示等を行う。
(もっと読む)
オブジェクト追跡装置
【課題】ズーム処理によって対象オブジェクトのサイズが変化しても、高速かつ高精度に対象オブジェクトを追跡することができるオブジェクト追跡装置を提供する。
【解決手段】探索領域設定部9は、現時点のフレーム画像のズーム倍率が前時点のフレーム画像のズーム倍率と異なる場合には、前時点のフレーム画像におけるオブジェクト領域、前時点のフレーム画像におけるズームの中心座標、前時点のフレーム画像のズーム倍率と現時点のフレーム画像のズーム倍率との比に基づいて、現時点のフレーム画像におけるオブジェクトの探索領域を設定する。正規化部10は、現時点のフレーム画像に含まれるオブジェクトの探索領域の画像を固定サイズに正規化する。マッチング部11は、正規化された探索領域の画像の中から、テンプレート画像と類似するオブジェクト領域を検索する。
(もっと読む)
動き検出装置
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
顔画像特徴量生成装置および顔画像特徴量生成プログラム
【課題】光の影響にロバストであって且つ高精度に顔画像特徴量を生成する。
【解決手段】画像データを取り込む画像データ取得部10と、画像データ取得部10が取り込んだ画像データに対して顔検出処理を実行し、その画像データから顔領域を抽出する顔領域抽出部20と、顔領域抽出部20が抽出した顔領域から、円形または楕円形の解析領域を二分する第1の領域および第2の領域を決定する解析領域決定部30と、解析領域決定部30が決定した第1の領域および第2の領域それぞれについて特徴量を計算し、これら計算した特徴量を連結して顔画像特徴量を生成する顔画像特徴量計算部40とを備えた。
(もっと読む)
画像処理装置、情報生成装置、画像処理方法、情報生成方法、制御プログラムおよび記録媒体
【課題】様々な形状に変化する物体であっても、画像上における物体の形状を高精度に検出する。
【解決手段】画像から物体の部位点を検出する部位点検出装置1であって、画像上に部位点に対する基準点を特定する基準点特定部23と、基準点に対する複数のサンプリング点毎に、サンプリング点の画素または画素群から特徴量を抽出し、抽出した各サンプリング点にそれぞれ対応する複数の特徴量から構成される、基準点に対する特徴量群を抽出する特徴量抽出部26と、複数のサンプリング点の各画素または各画素群から抽出された基準点に対する特徴量群と、基準点に対する部位点の相対位置を示す位置情報との対応関係を示すLRF関数を参照して、特徴量抽出部26が抽出した特徴量群に対応する位置情報を特定する位置情報特定部29と、位置情報特定部29が特定した位置情報の示す位置を物体の部位点とする部位点特定部30とを備える。
(もっと読む)
画像処理方法および画像処理装置
【課題】迅速かつ有効的に画像ピクセルの顕著性値を分析して、画像における重要物体領域を均一的に表現する。
【解決手段】本発明は、領域のコントラストに基づいて画像の視覚的顕著性を検出する画像処理方法と画像処理装置に関するものである。当該方法は、自動分割アルゴリズムを用いて入力画像を複数の領域に分割する分割ステップと、前記複数の領域のうちの一つの領域とその他の領域との色、の差分の重み付き和を利用して、当該領域の顕著性値を算出する算出ステップとを含む。
(もっと読む)
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】処理負荷を抑えつつ、より高性能なパターン認識を実現することを目的とする。
【解決手段】特徴抽出手段で抽出された画像の特徴に対して複数の部分領域を設定する領域設定手段と、部分領域毎の部分空間を保持する部分空間保持手段と、領域設定手段で設定された複数の部分領域から複数の特徴ベクトルを生成し、部分空間保持手段に保持される部分空間に射影し、複数の射影ベクトルを生成する部分空間射影手段と、部分空間射影手段で生成された複数の射影ベクトルから部分領域の夫々に対応する射影ベクトルを選択する選択手段と、選択手段で選択された射影ベクトルを連結し、識別特徴を生成する特徴生成手段と、特徴生成手段で生成された識別特徴を使用して識別処理を行う識別処理手段と、を有する。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
画像認識装置
【課題】対象物の認識での誤認識を低減すると同時に、認識処理のコストを抑制することができる画像認識装置を提供すること。
【解決手段】認識領域選択部12は、画像撮影部11により取得された画像における特徴的な領域を選択する。選択領域有効化部13は、特徴的な領域のみが認識対象とされるように有効化する。画像特徴量算出部14は、有効化された領域における画像特徴量を算出する。画像特徴量比較部16は、算出された画像特徴量と予め用意された参照画像の画像特徴量を比較する。結果出力部17は、算出された画像特徴量と最も近似するとされた画像特徴量を有する参照画像の識別子を認識結果として出力する。認識結果に関連付けられたメディアを表示させることもできる。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】特定対象物の識別処理を迅速に行う。
【解決手段】情報処理装置は、変換部および算出部を具備する。ここで、画像に含まれる特定対象物における特徴点とその周囲とを含む領域を第1領域とし、第1領域に含まれる1つの画素を基準画素とした場合におけるその基準画素とその周囲の画素とを含む領域を第2領域とする。変換部は、基準画素の特徴量とその基準画素に係る第2領域に含まれる他の画素の特徴量との比較結果に基づいて、他の画素の特徴量をその第2領域に含まれる画素毎に変換する。算出部は、基準画素毎に変換により求められた第2領域に含まれる各画素の値について、第2領域に含まれる各画素の位置毎に演算を行うことにより、特定対象物を識別する識別処理に用いられる特徴量を算出する。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が口を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から口の特徴点を抽出して口の縦幅および横幅を求め、口の縦幅および横幅と、口について予め求められた標準の縦幅および横幅との第1の差分および第2の差分をそれぞれ算出し、第1および第2の差分の絶対値を取った値に対して閾値判定を行う。第1の差分が第1の閾値Th1未満であり、且つ、第2の差分が第2の閾値Th2未満である場合に、口が覆われていないと判定する。また、第1の差分が第1の閾値Th1である場合において、第2の差分が第2の閾値Th2以下で、且つ、第3の閾値Th3を超える場合には、口を開けた状態が検出されたものと見做し、口が覆われていないと判定する。
(もっと読む)
動作解析装置
【課題】ユーザにとって、簡易に使用可能な動作解析装置を提供することである。
【解決手段】動作解析装置は、動画の入力を受け付けると(S11)、静止画を操作部に表示する(S12)。動作解析装置は、ユーザから静止画像上の任意の箇所を指定される(S13)。そうすると、指定点を中心とした半径rの範囲内において、第一の特徴点の検索を行う(S14)。そして、第一の特徴点を検索した静止画より時間的に後に隣り合う静止画において、第一の特徴点に対応する第二の特徴点の検索を行う(S15)。そして、特徴点の差を算出し(S16)、算出した差の平均値を求める(S17)。そして、連続する複数の静止画の隣り合う静止画像間の全てにおいて、特徴点の差をそれぞれ算出し、算出した差の平均値を求めると(S18において、YES)、求めた平均値を順に接続する。このようにして軌跡を作成する(S19)。
(もっと読む)
物体認識装置及び物体認識方法
【課題】従来手法と比較してより高速かつ高精度な3次元物体認識を実現可能とする。
【解決手段】物体認識装置1は、記憶画像と、記憶画像から予め抽出された特徴点と、特徴点の位置関係情報と、を記憶するデータベース2と、データベース2の記憶画像の特徴点と入力画像から抽出した特徴点との間で対応特徴点を探索して、記憶画像の特徴点の位置関係情報に基づいて算出する投票点を入力画像に投票し、その投票点が集中しかつ投票数が多いほど入力画像と記憶画像との類似度が高いと判定して、入力画像と類似する記憶画像を特定する記憶画像特定手段11と、特定された記憶画像を用いて想起画像を生成し、想起画像と入力画像とを比較して類似していると判断した場合に、入力画像に認識対象を検出したと判定する判定手段12と、を備える。
(もっと読む)
1 - 20 / 157
[ Back to top ]