
Fターム[5L096GA08]の内容
Fターム[5L096GA08]に分類される特許
121 - 140 / 941
画像処理装置、撮像装置、及びそれらの制御方法
【課題】映像中の対象物の動きの質に応じて、撮像時のボケの低減とランダム感の抑制とを両立可能な技術を提供する。
【解決手段】画像処理装置は、動く対象物を撮像した映像信号であって、前記対象物のぶれを含まない第1の映像信号と前記対象物のぶれを含む第2の映像信号とを入力する入力部と、映像信号を解析して前記対象物の動きを検出する動き検出部と、検出された動きの質に応じて、前記第1の映像信号と前記第2の映像信号を切り換え又は合成することにより出力映像信号を生成する出力制御部と、を有する。出力制御部は、等速度又は等加速度の動きである場合には第1の映像信号を、等速度又は等加速度の動きでない場合には第2の映像信号を出力する。或いは、等速度又は等加速度の動きでない場合には、等速度又は等加速度の動きである場合に比べ、第2の映像信号の重みを大きくする。
(もっと読む)
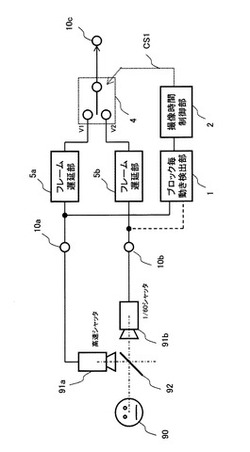
煙検出用周波数成分特定方法、および煙検出装置

【課題】フーリエ変換処理を用いることなく、煙のゆらぎスペクトルの周波数成分を簡易的に求め、気流に流される煙を検出する。
【解決手段】監視カメラにより時系列で撮像された複数の画像からなる時系列データに基づいて、注目領域において、異なるサンプリング間隔によるフレーム差分画像を生成する差分画像生成手段21と、異なるサンプリング間隔で生成されたそれぞれのフレーム差分画像ごとに、注目領域の差分量を算出する差分量算出手段22と、算出されたそれぞれの差分量の中で、最大となる差分量に対応するサンプリング間隔の逆数を、注目領域の時間スペクトルのピークを示す周波数成分として特定する対象周波数成分特定手段23とを備える。
(もっと読む)
動画オブジェクト検出装置、方法、及びプログラム
【課題】オブジェクトの誤検出と検出漏れとの双方を抑制する。
【解決手段】オブジェクト検出手段12は、動画像のフレーム画像からオブジェクトを検出し、検出したオブジェクトの位置をオブジェクトリスト記憶部14に記憶する。オブジェクト追跡処理手段13は、オブジェクトリスト記憶部14に記憶されたオブジェクトの位置を、そのオブジェクトが検出された時刻以後、複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。また、オブジェクト追跡処理手段13は、オブジェクト検出手段12でオブジェクトが新たに検出されたとき、その新たに検出されたオブジェクトの位置を、オブジェクトが検出されたフレーム画像の時刻よりも前の時刻に遡って複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。
(もっと読む)
カメラトラッキング装置およびそのプログラム
【課題】カメラ画像の特徴点をトラッキングすることでカメラの姿勢を推定するカメラトラッキング装置を提供する。
【解決手段】カメラトラッキング装置1は、カメラ画像から特徴点を検出する特徴点検出手段31と、検出された特徴点と、記憶手段20に予め記憶されている既知の特徴点との特徴空間上の距離に基づいて、閾値による近似判定を行うことで特徴点のマッチングを行い、対応点を検出する特徴点マッチング手段32と、インライヤ数とアウトライヤ数を集計する対応点集計手段33と、インライヤ数およびアウトライヤ数に応じて、特徴点マッチング手段32が使用する閾値に所定の調整量を加算または減算することで新たな閾値を算出する閾値算出手段36と、対応点に基づいてカメラ姿勢を推定するカメラ姿勢推定手段40と、を備えることを特徴とする。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法、および、動きベクトル検出プログラム
【課題】撮像装置または照度変化に由来して複数の画像間に輝度差が生じる場合でも、精度良く動きベクトルを検出する。
【解決手段】第一の画像上の複数の領域について、第一の画像とは異なる第二の画像との間の動きベクトルを検出する動きベクトル検出装置は、複数の領域ごとに、第二の画像上で相関性の高い領域を求めることによって、第一の画像と第二の画像との間の第一の動きベクトルを算出する第一動きベクトル算出部101と、第一の動きベクトルの信頼性を判定する信頼性判定部102と、第一の動きベクトルの信頼性が高いと判定された領域内の画素について、第一の画像と第二の画像との間の輝度差を算出する輝度差算出部104と、輝度差を用いて、第一の動きベクトルの信頼性が低いと判定された領域の第二の動きベクトルを算出する第二動きベクトル算出部106とを備える。
(もっと読む)
形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置
【課題】形状ベースマッチング処理における精度や処理時間、ロバスト性等の特性に関して最適化されたテンプレートデータを作成するための形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置を提供する。
【解決手段】形状ベースマッチング処理を用いて電子部品2の搭載位置決めをする部品実装装置において、サーチ評価画像を取得し、このサーチ評価画像をもとに上記パラメータを調整する。このとき、先ず、位置決め処理の精度が、ユーザが指定した要求精度を満たすようにパラメータを設定する。次に、位置決め処理のタクトタイムが短縮する方向に上記パラメータを徐変しながら精度を評価し、当該精度が要求精度を保てる限界値を最適なパラメータとして取得する。この最適パラメータ取得処理を、部品ロットの切り替わりに際し必要に応じて行う。
(もっと読む)
画像処理装置、画像処理方法
【課題】 表示画面内で映像酔いを引き起こす可能性のある部分領域に対して、映像酔い防止を目的とする補正処理を行うための技術を提供すること。
【解決手段】 表示画面におけるユーザの注視領域を特定する(S101)。注視領域に対して比較的大きく且つ画素値の分散値が閾値以上となる候補オブジェクトを特定する(S102〜105)。候補オブジェクトのうち、フレーム画像間の動きの周期が規定範囲内且つ動きの量が閾値以上となる補正対象オブジェクトを特定する(S106,S107)。補正対象オブジェクトが注視領域内に位置する更新対象フレーム画像上で補正対象オブジェクトを再配置させて表示画面に表示させる。
(もっと読む)
移動体検出装置及びプログラム
【課題】カメラの撮影映像から移動体を検出する装置の検出能力を高める。
【解決手段】移動体検出装置は、撮影映像から特徴点及び動きのある特徴点を抽出し、この抽出結果とテンプレートデータとを比較して移動体を検出する。テンプレートデータは、撮影映像において移動体が映る領域の位置情報、移動体が映っている状態での当該領域の特徴点及び動きのある特徴点の分布を表す空間分布特徴量が記述されたデータである。空間分布特徴量は、対象領域を区画化してなる区画毎の当該区画の特徴点数及び動きのある特徴点数を表す要素からなるベクトル量である。移動体検出装置は、上記抽出結果に基づき、テンプレートデータが示す領域に対応する移動体検出対象の領域において区画毎の特徴点数及び動きのある特徴点数をカウントして空間分布特徴量を生成する。そして、これとテンプレートデータが示す空間分布特徴量とを比較することにより、移動体を検出する。
(もっと読む)
ヒューマンコンピュータインタラクションシステム、手と手指示点位置決め方法、及び手指のジェスチャ決定方法
【課題】HCIシステムにおける手と手指示点の位置決め方法及び手指のジェスチャ決定方法を提供する。
【解決手段】手位置決め方法は、被制御領域の画像を連続取得して、前景物が含まれる画像列を取得する段階と、撮像した前記画像から前景画像を抽出し、抽出した前記前景画像の2値化処理を行って、2値化前景画像を生成する段階と、前記2値化前景画像の最小凸包の画素頂点集合を取得し、該最小凸包の各画素頂点を中心点に、手が含まれる候補領域として関心領域を構築する段階と、構築した前記各関心領域から手画像特徴を抽出し、パターン認識方法により、前記候補領域における前記手が含まれる関心領域を決定する段階とを含む。
(もっと読む)
流水監視システムおよび流水監視プログラム
【課題】監視対象にある水路の流水異常を経済的に有利な構成で効率よく検知し報知することができる流水量監視システムを提供する。
【解決手段】流水(Wb)部分を含む水路1の画像を撮影する単眼カメラ(一つのカメラ)11と、このカメラ11で撮影した水路1の画像をキャプチャするキャプチャ部12と、このキャプチャ部12でキャプチャした時系列の複数の画像から背景画像を作成し、背景画像の時系列に従う領域変化から水路1の流水量を判定する画像処理部13と、画像処理部13の判定結果の情報を出力する出力手段(表示部)19とを備える流水監視システム。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】被写体画像を抽出した後でも、当該被写体画像の修正を行う。
【解決手段】撮像装置100であって、被写体存在画像と被写体非存在画像との間で対応する各画素の差分情報に基づいて、被写体存在画像から被写体が含まれる被写体画像を抽出する画像抽出部8cと、抽出された被写体画像における修正すべき領域を所定条件に従って特定する修正領域特定部8gと、特定された修正すべき領域を、被写体存在画像における修正すべき領域と対応する領域に基づいて修正する画像修正部8hとを備えている。
(もっと読む)
人物属性推定装置、人物属性推定方法、及びプログラム
【課題】 顔画像から人物の属性を精度よく推定することが可能な人物属性推定装置等を提供する。
【解決手段】 人物の属性を推定するための特徴量として、顔領域のシワ特徴量、シミ特徴量、及び唇特徴量を算出する。シミ特徴量は、肌マスクによるマスク処理後画像とこれを更にスムージング処理したぼかし画像との差分を用いてブロック毎に算出する。シワ特徴量は肌マスクによるマスク処理後画像からシワの強度と方向とをブロック毎に算出する。唇特徴量は、肌マスクを用いて抽出される唇領域について、元の顔領域内の基準色に対する色の比較値として算出する。このようにして算出されたシミ特徴量、シワ特徴量、及び唇特徴量を用いることにより年齢・性別等の人物属性を精度よく推定でき、また環境変動によるロバスト性を向上できる。
(もっと読む)
物体種別判定装置
【課題】特定種別の物体の検出漏れが生じることを抑制した物体種別判定装置を提供する。
【解決手段】赤外線カメラ2による撮像画像から、物体の画像部分を抽出する画像部分抽出部13と、前記画像部分について、特定種別の物体を想定して決定された複数の判定要素を抽出する判定要素抽出部と、前記複数の判定要素に対して抽出結果に応じた点数を付与すると共に、付与した点数の合計点である判定要素総合点を算出する判定要素総合点算出部15と、判定要素総合点が基準値以上であるときに、前記画像部分に対応する実空間上の物体の種別が前記特定種別であると判定する物体種別判定部16とを備える。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、および画像処理プログラム
【課題】画像中の被写体の主要度をより的確に判定することを可能とする。
【解決手段】画像処理装置100は、時系列に撮像して得られた一連の複数フレームの画像を入力する画像入力部102と、画像入力部102で入力された複数フレームの画像から、主要度の判定をする対象である判定対象領域を抽出する判定対象領域抽出部104と、複数フレームの画像中における判定対象領域の出現頻度に基づいて判定対象領域の主要度を判定する判定部106とを備える。
(もっと読む)
動きベクトル検出装置
【課題】 繰り返しパターンから正しい動きベクトルを検出する。
【解決手段】 現在フレームの注目ブロックと参照フレームの複数の参照ブロックのそれぞれとの間の複数のマッチング誤差を計算し、それらの最小マッチング誤差を計算し、前記複数のマッチング誤差の散らばりが大きいほど大きい閾値を計算し、前記注目ブロックと異なる他の注目ブロックについて検出された動きベクトルから補正ベクトルを計算し、前記参照ブロックのうち前記マッチング誤差と前記最小マッチング誤差との差分が前記閾値以内であるブロックの中で、前記注目ブロックとの間の相対位置ベクトルが前記補正ベクトルに最も近いブロックに関する前記相対位置ベクトルを、前記注目ブロックの動きベクトルとして決定する。
(もっと読む)
移動ロボットの遠隔操縦のための衝突防止装置及び方法
【課題】遠隔操縦のための衝突防止装置及び方法に係り、ユーザに移動ロボットの移動に関する情報を容易に伝達する。
【解決手段】移動ロボットに装着されたカメラで撮影した映像を所定の時間差で保存して比較してオプティカルフローを計算し、FOEを計算する。また、移動ロボットの移動速度及び移動方向についての情報を獲得する。計算されたFOEと、移動速度及び移動方向と、を利用して、移動ロボットの走行方向に存在する障害物を感知し、感知された障害物に衝突するまでに要するTOCを計算し、そのTOCを利用して障害物に移動ロボットが衝突する可能性がある衝突予想領域を計算する。その計算結果に基づいて、画面に表示される衝突予想領域にマッピングするカラーの情報を生成する。具体的には、計算されるTOCの値によってカラーの色調を調整し、TOCの値が小さければカラーの点を濃くし、TOCの値が大きければカラーの点を薄くする。
(もっと読む)
画像監視装置
【課題】監視対象物である金庫や保管庫に近づく人が検出された場合、室内が暗くて当該人が顔を隠蔽しているか否かを判定できない場合に異常とする画像監視装置を提供する。
【解決手段】画像監視装置10は、撮像部20にて取得された画像を処理し、入力画像全体の輝度値が所定未満であり、かつ変化領域抽出手段42により抽出された変化領域内の輝度が所定未満の場合あるいは、変化領域から頭部領域が抽出できない場合等に画像監視装置10が設置された室内が不審者が存在していても顔隠蔽判定処理が実行不能な暗い環境であるとして異常判定する制御手段を有する。
(もっと読む)
画像処理システム及びプログラム
【課題】利用者が指定しなくても、原稿画像に含まれる複数の選択肢画像の各々に対応する選択肢領域を設定できるようにすること。
【解決手段】基準アンケート画像取得部(21)は、複数の選択肢画像を含む基準アンケート画像を取得する。アンケート画像取得部(23)は、上記複数の選択肢画像と、追記画像と、を含む複数のアンケート画像を取得する。追記領域特定部(25)は、アンケート画像ごとに、当該アンケート画像と基準アンケート画像との比較結果に基づいて、追記画像を含む追記領域を特定する。選択肢領域設定部(27)は、アンケート画像ごとに特定された追記領域の座標情報に基づいて、各選択肢画像に対応する選択肢領域を設定する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】限られたハードウェア資源を用いて高精度に画像解析を行う。
【解決手段】連続して撮像された複数の画像に含まれる第1の画像及び第2の画像を入力する。第1の画像及び第2の画像に対して同位置に、同サイズの検知領域を設定。第1の画像と第2の画像との間で、検知領域内の画像に差異があるか否かを判定する。差異があると判定した場合に、第1の画像と前記第2の画像とが異なることを示す通知を出力する。
(もっと読む)
人物識別装置、人物識別方法及び人物識別装置を備えた空気調和機
【課題】好みの空調制御を精度高く学習することにより快適性を向上するとともに省エネ運転が可能な空気調和機を提供すること。
【解決手段】人物が存在する位置を検出する位置検出手段と、前記人物を識別するための情報である人物特定情報を取得する人物特定情報取得手段と、前記位置検出手段が検出した位置情報と、前記人物特定情報取得手段が取得した人物特定情報を関連付けて人物識別情報として記憶する記憶手段とを有し、さらに、人物識別手段は前記位置検出手段が検出した位置情報を、前記記憶手段に記憶されている人物識別情報と照合することで、人物を識別する人物識別装置。人物の位置情報を利用して人物識別を実現することで、実用的に、精度のよい人物識別を達成することができる。
(もっと読む)
121 - 140 / 941
[ Back to top ]