
Fターム[5L096GA10]の内容
Fターム[5L096GA10]の下位に属するFターム
Fターム[5L096GA10]に分類される特許
101 - 120 / 191
動体認識方法及び動体認識装置
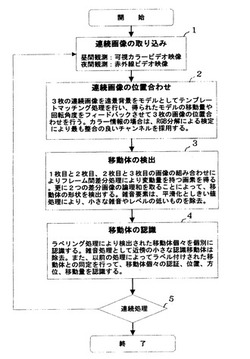
【課題】 映像カメラを搭載した船体運動の影響を受けて、撮影した複数の隣接するフレームの映像の位置が一致しない揺動画像から、動く対象物をリアルタイムに自動抽出して認識する。
【解決手段】 所定の時間間隔で連続して撮影された連続画像を取り込むステップと、3枚の連続画像に遠景背景をモデルとしてテンプレートマッチング処理を行うステップと、テンプレートマッチング処理により得られたモデルの移動量や回転角度をフィードバックさせて3枚の連続画像の位置合わせを行うステップと、1枚目と2枚目、及び2枚目と3枚目の画像の組み合わせによりフレーム間差分処理を行い、得られた2つの差分画像の論理和を取り、動体を検出するステップと、検出された移動体に対してラベリング処理を行って、移動体個々を個別に認識するステップとからなる。
(もっと読む)
オブジェクト検出方法

【課題】画像中に存在する1〜複数個のオブジェクトを高速に検出するオブジェクト検出方法を提供する。
【解決手段】オブジェクト検出方法において、演算回数が少なく単純な1次判別器161を用いて、一定間隔毎にオブジェクトが存在するか判別する1次探索ステップ110と、1次探索の結果の空間的な関係性から、オブジェクトが実際に存在する範囲を推定する範囲推定ステップ120と、1次探索で用いたオブジェクト判別器より詳細な判別が可能な2次判別器162を用いて、オブジェクト判別処理を行う2次探索ステップ130と、オブジェクト判別の結果に基づいて、あるオブジェクト存在範囲内で類似度が最も大きくなる位置をオブジェクト存在位置と推定するオブジェクト位置推定ステップ140と、最終的なオブジェクトの位置を判別する最終探索ステップ150を有する。
(もっと読む)
画像処理装置及び画像形成装置
【課題】網点領域の誤判別を抑制し、画質の劣化を抑制することができる画像処理装置を提供すること。
【解決手段】第1孤立点カウント部544は、対象画素を中心とした縦9画素*横9画素の範囲内の孤立点の数をカウントする。比較部551は、第1孤立点カウント部544によりカウントされた孤立点の数Pが所定の範囲内であった場合に信号S13を出力する。第2孤立点カウント部546は、信号S13に基づき、上記対象画素を中心とした縦5画素*横5画素の範囲内の孤立点の数をカウントする。比較部553は、第2孤立点カウント部546によりカウントされた孤立点の数が所定の閾値REF12よりも大きい場合に、網点領域であることを示す信号S16を出力する。
(もっと読む)
動き検出装置及び方法並びに撮像装置
【課題】画像の輝度が比較的低い場合などにおける、画像間の動きの検出精度を向上させる。
【解決手段】代表点マッチング法により異なる評価画像間で算出した複数の累積相関値に基づき、前記異なる評価画像間の動きを検出する動き検出装置において、前記複数の累積相関値の中から、最小の累積相関値、又は、最小の累積相関値を所定の規則に従って増加させた値以下の累積相関値を、候補相関値として特定する。そして、前記候補相関値が複数ある場合、前記候補相関値ごとに、前記候補相関値と近傍の累積相関値との平均値を算出し、最小の平均値に対応する候補相関値の位置をマッチング位置として検出して前記異なる評価画像間の動きを検出する。
(もっと読む)
画像処理装置および方法
【課題】 観察対象が隠蔽物体により隠蔽される場合の自然特徴の誤検出を防止し、位置合わせの安定性を向上させる。
【解決手段】 観察対象物体を隠蔽する隠蔽物体を定義する隠蔽物体定義手段と、入力された撮像画像において、前記隠蔽物体が前記観察対象物体を隠蔽する隠蔽領域を検出する隠蔽領域検出手段と、前記撮像画像から前記観察対象物体の画像特徴を検出する画像特徴検出手段と、前記画像特徴検出手段において検出された画像特徴に基づき、前記撮影画像を撮影した際の撮像装置の位置または姿勢、または観察対象物体の位置または姿勢を算出する算出手段とを備える。
(もっと読む)
オブジェクト検出装置、オブジェクト検出方法および制御プログラム
【課題】演算処理負担を軽減し、高速にオブジェクトを認識し、オブジェクト画像の検出を行う。
【解決手段】オブジェクト検出装置は、検出対象画像を構成する各画素について画像特徴量を抽出し、画像特徴量に基づいて各画素がオブジェクトを構成する画素であるか否かを判別し、検出対象画像をn値(nは、2以上の整数)画像に変換し、n値画像に基づいて検出対象画像を構成する所定の画素範囲の画像がオブジェクト画像を構成するか否かの確信度を判別するための積分画像を生成し、前記積分画像に基づいて設定した検出窓に対応する画像がオブジェクトを構成するオブジェクト画像であるか否かを判別する。
(もっと読む)
高次局所共起特徴導出方法及びプログラム
【課題】 高次局所自己相関特徴量の上位概念として高次局所共起特徴を導出する。
【解決手段】 並進した画像と相関をとる際に、並進した画像が一つとは限らないように一般化した自己相関の拡張である高次局所自己相関(HLAC)で使用する0〜N次の各次マスクパターンを用意する。0〜N次の各次マスクパターンに対して、それぞれ0〜N次の高次局所自己相関(HLAC)で参照される近傍の輝度値の結合ヒストグラムを生成する。これらヒストグラムを高次局所共起特徴とする。高次局所自己相関(HLAC) 特徴量の一つの拡張的概念として、高次局所共起特徴を導出する。
(もっと読む)
整数画素動き予測機構、1/4画素輝度用動き予測機構、1/4画素色差用動き予測機構、組合せ輝度用動き予測機構、組合せ輝度・色差用動き予測機構及び1/4画素輝度・色差用動き予測機構
【課題】回路構成の簡略化を図りながら高速に動き予測が行える動き予測機構を得る。
【解決手段】IME11の整数画素動き予測に用いられるRAM_HIME21は、SDRAM1より整数画素の輝度データD1を、抽出矩形領域42に関し読み出し効率向上を図った条件を満足して格納する。SME13による1/4画素動き予測に用いられるRAM_HSME23は一部1/4画素輝度データS12を、演算後矩形領域48の演算による取得に関し効率化を図った条件を満足して格納する。QPG14による1/4画素精度の色差データ生成に用いられるRAM_HMEC24はSDRAM1より整数画素の色差データD2を、演算後矩形領域40U及び演算後矩形領域40Vの演算による取得に関し効率化を図った条件を満足して格納する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】精度良く繰り返し画像を抽出することを目的とする。
【解決手段】画像中に繰り返し画像があるか否かを判定し(100)、繰り返し画像がない場合には、画像のパッチ分割にてランダムな繰り返し画像を作成して出力する(108)。また、繰り返し画像が2×2以上あるか否かを判定し(102)、繰り返し画像が2×2以上ある場合には、画素値の周波数変換による繰り返し周期特定にて繰り返し画像を抽出して出力し(104)、繰り返し画像が2×2以上ない場合には、自己相関係数の極大値分割による繰り返し周期特定にて繰り返し画像を抽出して出力する(206)。
(もっと読む)
画像処理装置、画像処理方法、撮像装置および撮像方法
【課題】ブロックマッチングを用いて手ぶれを補正した画像を得る場合において、手ぶれの平行移動成分のみではなく、回転成分をも補正して、高精度の補正を実現する。
【解決手段】画面単位で順次に入力される画像について、注目画面である参照画面と、当該参照画面よりも前の画面である元画面との間の動きベクトルを算出するに、元画面中の複数の所定の位置に、それぞれ複数の画素からなる所定の大きさのターゲットブロックを複数個設定して、参照画面との間でブロックマッチングを行い、前記複数のターゲットブロックのそれぞれについてのブロック毎動きベクトルを算出する。算出された複数のブロック毎動きベクトルから、元画面に対する参照画面の平行移動量と、元画面に対する参照画面の回転角を算出する。算出された平行移動量と、回転角とを用いて、複数枚の画面を重ね合わせて、手ぶれを補正した画像を得る。
(もっと読む)
画像処理装置及びプログラム
【課題】文字画像又は線画像のエッジ方向をより迅速に判定する。
【解決手段】エッジ判定部12は、現在の注目画素の周辺に位置する過去の注目画素のエッジ判定結果に基づいて、記憶部13に記憶されている複数のエッジ判定アルゴリズムから適切と推測されるものを選択して、これを現在の注目画素に最初に適用してエッジの判定を試みる。具体的には、エッジ判定部12は、エッジを表す画素であると判定した過去の注目画素の位置から見て、そのエッジ方向に位置する現在の注目画素についてエッジ判定を行う場合には、そのエッジ方向に応じたエッジ判定アルゴリズムを最初に用いる。
(もっと読む)
画像解析装置、画像解析方法及びプログラム
【課題】現在及び過去の知見を総合勘案して、撮像された画像中の適切な箇所に対して監視等のための画像解析を行う。
【解決手段】フレーム画像を順次取得するフレーム画像取得部14と、順次取得されるフレーム画像中の注目位置ベクトルを判断する画像解析部16と、注目位置ベクトルに基づいて画像解析部16による解析対象となるフレーム画像中の領域を特定する解析領域データを生成する解析領域判断部18と、を含む。解析領域判断部18は、注目位置ベクトルに基づき、短期記憶用の自己組織化マップの結合重みベクトルの少なくとも一部を注目位置ベクトルに近づけつつ、時間経過に従って、それら短期記憶用の自己組織化マップの結合重みベクトルを長期記憶用の自己組織化マップの結合重みベクトルに近づける。
(もっと読む)
対象物検出装置、方法及びプログラム
【課題】画像に高輝度が含まれる場合でも、その画像に基づいて高精度に対象物を検出する。
【解決手段】対象物検出装置は、入力画像からウインドウ画像を抽出するウインドウ画像抽出部1と、閾値を超えないようにウインドウ画像の輝度値を補正する輝度補正部2と、学習モデルを記憶する学習モデルデータベース3と、補正されたウインドウと学習モデルとに基づいて対象物を検出する評価部4と、対象物の検出結果を出力する出力部5と、を備えている。
(もっと読む)
人物領域検出装置、人物領域検出方法及びプログラム
【課題】画像の画素の色に依存せずに人物領域の候補となる領域を特定できる技術を提供する技術を提供する。
【解決手段】人物領域検出装置では、対象画像の各画素におけるエッジ強度が導出され(ステップS21)、対象画像においてエッジ強度が同一のレベルに属し互いに隣接する画素群がそれぞれ、当該レベルに属する等高領域として設定される(ステップS23)。そして、エッジ強度が最大のレベルに属する一の等高領域が初期の注目領域とされ、最大のレベルとは異なるレベルに属する注目領域に近接する等高領域が、エッジ強度が大きなレベルから順に注目領域に結合される(ステップS26)。その結果として得られた注目領域が人物候補領域とされる。対象画像の画素の色を用いず、エッジ強度に基づいて人物候補領域を特定することから、対象画像の画素の色に依存せずに人物候補領域を特定できる。
(もっと読む)
画像レジストレーション方法
【課題】時系列画像中における注目画像と参照画像との間のモーションを推定するための領域選択型レジストレーション方法であって、あらゆる形状を有する対象のレジストレーションに適用でき、照明変化やオクルージョンにロバストで且つ高精度な画像レジストレーションを行い得る画像レジストレーション方法を提供する。
【解決手段】対象を撮影した時系列画像中の参照画像と注目画像との間に高精度なレジストレーションを行う画像レジストレーション方法であって、参照画像上の所定の領域を注目領域に設定し、レジストレーションを行う際に、設定された注目領域内で、平面射影変換によって正確にレジストレーションできる領域を表すマスク画像の画素に基づき、モーションパラメータを推定する。画像間の類似度評価を利用することによって、マスク画像を生成する。
(もっと読む)
画像解析装置
【課題】管腔内異常組織の存在位置の検出を向上させる。
【解決手段】CPUは、ステップS10にて例えばR信号について濃淡値勾配算出処理を実行し、ステップS11にて算出した濃淡値勾配より等方性変化特徴量算出処理を実行し、さらにステップS12にて算出した等方性変化特徴量よりポリープの存在する位置にポリープ候補画像26を生成するポリープ候補検出処理を実行する。
(もっと読む)
デジタル画像の領域を検知する方法およびシステム
【課題】スキャナ等で読み込んだ画像データであっても、効率的かつ精度よく領域の種別を検知することが可能なデジタル画像の領域検知方法およびシステムを実現する。
【解決手段】本発明の方法は、デジタル画像の領域を検知する方法であって、a)上記デジタル画像に対してマスキング条件を適用して、上記マスキング条件を満たすマスク画素を識別する第1ステップ(52)と、b)上記マスク画素の寄与が上記マスキング条件によって識別されない画素の寄与よりも小さくなるようにしてエントロピー量を計算する第2ステップ(54・55)と、c)上記エントロピー量に基づいて、上記デジタル画像の近傍画素が属する領域の種別を分類する第3ステップ(57)と、を含む。
(もっと読む)
画像処理装置、方法、プログラムおよび記録媒体
【課題】低濃度太文字の文字内部は文字エッジと同等あるいは比較的近い処理を施すことで、色や明度の段差や色ずれによる白抜けが無い文字画質を達成し、高濃度太文字の文字内部は文字エッジとは異なる処理を施すことで、原稿の明度を忠実に再現し、絵柄部の誤分離を削減する。
【解決手段】属性判定手段20が低濃度黒文字内部と判定した場合、文字用の墨生成テーブルを使用し、高濃度黒文字内部と判定した場合、絵柄用の墨生成テーブルを使用し、絵柄重視の画質モードでは絵柄用のプリンタγおよび中間調処理を行う。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】検出する必要のない顔画像を検出させないようにしつつ、同一人物の顔画像を正確に追跡できるようにする。
【解決手段】顔画像抽出部24は、画像より顔画像を抽出し、顔画像位置記憶部29は、抽出される顔画像の画像内での移動位置を連続的に記憶し、顔画像移動位置予測部30は、記憶された顔画像の移動位置を予測し、マスキング処理部23は、画像の所定の領域に、顔画像の抽出が不能なマスキング領域を発生し、マスキングオンオフ制御部31は、予測された顔画像の移動位置が、マスキング領域に含まれる場合、マスキング領域が発生しないように切り替える。本発明は、遊技店の監視装置に適用することができる。
(もっと読む)
画像処理方法及び画像処理装置
【課題】グレースケースの撮像画像から線分要素を抽出する画像処理方法に関し、モルフォロジー処理を用いても、高速且つコントラスト比に影響しない線分抽出を行う。
【解決手段】撮像画像から連続した線分が存在する可能性がある領域を選択する選択処理(42)と、選択された領域に対し、オペレータの走査を伴う、線分要素検出のためのモルフォロジー処理(44)とを実施する。高速に複数方向の線分抽出が可能となる。又、抽出対象領域選択処理(46)により、コントラスト比の高い部分から線分の成長方向に連続するコントラスト比の低い部分も、1つの線分として、抽出する。このため、コントラスト比によらず、精度良く線分抽出できる。
(もっと読む)
101 - 120 / 191
[ Back to top ]