
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
21 - 40 / 1,211
危険検知装置及び危険検知方法
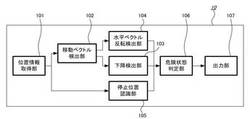
【課題】危険な状態を短時間で、かつ精度よく検知することが可能な危険検知装置を提供する。
【解決手段】位置情報取得手段101は、人物の身体上部の一点である計測点の位置情報を取得する。移動ベクトル算出手段102は、位置情報の変化を示す移動ベクトルを算出する。下降検出手段103は、移動ベクトルの垂直方向成分である垂直移動データに基づいて計測点の下降を検出する。反転検出手段104は、移動ベクトルの水平方向成分である水平移動データに基づいて計測点の反転を検出する。危険状態判定部105は、下降検出手段103が下降を検出し、かつ水平移動ベクトル反転検出手段104が反転を検出したとき、危険状態と判定する。出力部106は、危険状態判定部の判定結果に応じて危険情報を出力する。
(もっと読む)
入力体の動き検出方法およびそれを用いた入力デバイス

【課題】1台の光学的撮像手段を用いた画像解析から、人の手先の三次元的な動きを検出することのできる入力体の動き検出方法と、この動き検出方法を用いた指示操作用の入力デバイスを提供する。
【解決手段】光源Lと、手先Hに対して光源Lと同じ側に配置された光学的撮像手段(カメラC)と、制御手段と、上記カメラCで得られた二次元画像から、拳の形状の分布重心の座標Gと指の先端の座標Tとを算出する形状認識手段と、上記拳の重心座標Gと指先座標Tの間の距離(d)を比較する動き判定手段と、を備えている。これにより、上記拳の重心座標Gと指先座標Tの間の距離(d)が、計測前後で縮小または拡大した場合に、その際の手先Hの動きを、上記カメラCの仮想撮影平面Pに対する指の上下動(Z方向の動き)として判断することができる。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
特徴点判別装置
【課題】 抽出した特徴点が同一平面上に存在するか否かを精度よく判別できる特徴点判別装置を提供する。
【解決手段】 車両に搭載され、周囲環境を画像として撮像する車載カメラ1と、撮像された画像から特徴点を抽出する特徴点抽出部3と、抽出された特徴点の時間的対応を求める特徴点対応付け部4と、抽出された特徴点の中で所定の位置関係にある3つの特徴点を選択する特徴点選択部5と、選択された3つの特徴点が同一平面上に存在するか否かを判別する特徴点判別部6と、を備え、特徴点判別部6は、選択された特徴点の時間的対応に基づいて、選択された3つの特徴点によって形成される画像上の距離の比が時間的に不変である場合に、選択された3つの特徴点が全て同一平面上に存在すると判別する。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
物体運動推定装置、物体運動推定方法及びプログラム
【課題】 従来のオプティカルフロー推定法と比較して、推定精度を向上させ、かつ、例えば照明変動などに対して頑健な物体運動推定装置等を提供する。また、運動物体の境界等も検出可能とする。
【解決手段】 物体運動推定装置(1)は、画像データの系列における物体の運動を表すオプティカルフローを、動的システムモデルに基づき推定する。この動的システムモデルの状態は、画像データの推定領域における各ピクセルの輝度、及び、各ピクセルの全部又は一部でのオプティカルフローである。輝度時間発展部(11)は、ある時刻の状態における輝度及びオプティカルフローから、新たな時刻の輝度を演算する。オプティカルフロー時間発展部(13)は、少なくとも、ある時刻の状態におけるオプティカルフローから、新たな時刻の状態におけるオプティカルフローを演算する。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
動き検出装置
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
オブジェクト探索装置、映像表示装置およびオブジェクト探索方法
【課題】簡易な手順で高速かつ精度よくオブジェクトを探索できるようにする。
【解決手段】一実施形態に係るオブジェクト探索装置1は、画面フレームを複数に分割した複数の分割フレーム領域を一つずつ順に探索領域として設定する探索領域設定手段3と、分割フレーム領域に含まれるオブジェクトを探索して、探索されたオブジェクトの座標位置を検出するオブジェクト探索手段4と、探索されたオブジェクトの座標位置を基準として、過去と現在の画面フレームを比較して動き検出を行い、現在の画面フレームでのオブジェクトの座標位置を検出するオブジェクト追従手段5と、探索されたオブジェクトの座標位置と追従されたオブジェクトの座標位置とを比較して、重複する座標位置を削除して、オブジェクトの座標位置を特定する座標合成手段6と、を備える。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
監視装置、監視方法及び監視プログラム
【課題】高精度に不審対象を検出することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24は、動線情報から、予め設定された不審行動パターン31に応じて、対象検出部21により検出された対象を不審対象と判定し、それ以外の対象を新たな不審対象候補として設定する。複合行動判定部26は、新たな不審対象候補の動線情報と、新たな不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、新たな不審対象候補が不審対象か否かを判定する。
(もっと読む)
エレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法
【課題】かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得る。
【解決手段】エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する第1、第2ラインセンサ11a、11bと、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の投影面積を算出する投影面積算出部131と、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の移動方向を判定する移動方向判定部132と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部133とを備えている。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、電子機器、及び、プログラム
【課題】局所的な動被写体や照度変化等にロバストであり、又、精度の高いグローバル動き探索処理を行なうことができる技術を提供する。
【解決手段】画像処理装置は、処理対象画像を複数の分割画像にする画像分割部と、複数の分割画像の内で、動き探索処理の信頼性が閾値以上である若しくは信頼性が相対的に高い分割画像を選択する分割画像選択部と、分割画像ごとに動き探索処理を行なう第1の動き探索処理部と、選択された分割画像についての第1の動き探索処理部による動き探索処理の情報に基づいて、画像分割を行なわない画像全体に対して動き探索処理を行なう第2の動き探索処理部とを備える。
(もっと読む)
コマンド発行装置、コマンド発行方法およびプログラム
【課題】送り動作と、送り動作とは異なる動作(例えば復帰動作や予備動作等)とを区別可能なコマンド発行装置、コマンド発行方法およびプログラムを提供する。
【解決手段】実施形態のコマンド発行装置は、取得部と検出部と第1設定部と第2設定部と第1算出部と第2算出部と発行部とを備える。取得部は、被写体を撮像した画像を取得する。検出部は、画像から、被写体の特定部分を検出する。第1設定部は、検出部で検出された特定部分の位置を示す特定位置を設定する。第2設定部は、画像のうち基準となる位置を示す基準位置を設定する。第1算出部は、基準位置から特定位置へ向かう位置ベクトルを算出する。第2算出部は、コマンドベクトルごとに、当該コマンドベクトルと位置ベクトルとの一致度を示す第1パラメータを算出する。発行部は、第1パラメータの値に基づいてコマンドを発行する。
(もっと読む)
認識装置、方法及びプログラム
【課題】認識精度の低下を防止する。
【解決手段】実施形態の認識装置は、取得部、算出部、主軸選定部、転換点設定部、区間設定部、決定部、及び提示部を備える。取得部は、第1軸〜第n軸を有する座標系で表される特定部位の位置を時系列で取得する。算出部は、位置毎に特定部位の移動ベクトルを算出する。主軸選定部は、移動ベクトル毎に、第1軸〜第n軸それぞれとの内積値である第1内積値〜第n内積値を算出し、絶対値が最も大きい内積値の算出に用いられた軸を主軸に選定する。転換点設定部は、主軸が切り替わる位置を主軸転換点及び方向転換点に設定し、移動ベクトルの方向が主軸成分において切り替わる位置を方向転換点に設定する。区間設定部は、判定対象区間、直前区間を設定する。決定部は、判定対象区間の評価値と直前区間の評価値とを用いて、判定対象区間における特定部位の移動に優位な軸を決定する。提示部は、決定結果に応じた提示を行う。
(もっと読む)
動きベクトル導出装置および方法
【課題】あるブロックについて動きベクトルの候補が複数存在する場合においても、その複数の動きベクトルの中から画質劣化を最小とする動きベクトルを精度良く導出する。
【解決手段】動きベクトル導出部14は、二つの画像フレーム内の対応するブロック間の動きベクトルを導出する。候補ベクトル生成部20は、動きベクトルの計算対象ブロックについて複数の候補ベクトルを生成する。ブロックテクスチャ抽出部22は、候補ベクトルが生成された画像フレーム内のブロックテクスチャを抽出する。輝度差計算部30は、抽出された複数のブロックテクスチャについて、ブロックテクスチャを構成する画素の隣接画素間の輝度差の累積値を計算する。動きベクトル選択部26は、累積値の最大値が残りの累積値よりも所定倍以上の大きさであるとき、最大値が得られたブロックテクスチャから生成された候補ベクトルを前記対象ブロックの動きベクトルとして選択する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】時系列順に撮像された一連の画像から網羅性の高い要約画像を検出することができる画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】画像処理装置は、時系列順に撮像された一連の画像間において同一の対象が映る領域同士を対応づけ、該対応づけられた領域全体を1つの連結領域として設定する対応領域連結部110と、該連結領域の特徴量を算出する連結領域特徴量算出部120と、特徴量をもとに、上記一連の画像に映された対象が該一連の画像内の各画像に集約されている度合いに対応する要約指標値を算出する要約指標値算出部130と、要約指標値をもとに要約画像を検出する要約画像検出部140とを備える。
(もっと読む)
21 - 40 / 1,211
[ Back to top ]