
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
101 - 120 / 1,211
ジェスチャー認識装置、方法、プログラム、および該プログラムを格納したコンピュータ可読媒体
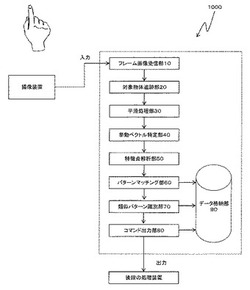
【課題】自由空間を移動する物体の軌跡によって表わされるジェスチャーを認識するためのジェスチャー認識装置を提供する。
【解決手段】本発明のジェスチャー認識装置(1000)は、前記物体を撮像した動画像を構成するフレーム画像における前記物体の位置する画素座標を求め、撮像時刻に基づく時系列の画素座標データを生成する物体追跡手段(20)と、前記求めた画素座標における前記物体の移動方向を求め、時系列の移動方向データを生成する移動方向特定部(40)と、予め用意した移動方向の組み合わせからなる複数のジェスチャーパターンの中から前記移動方向データと一致するジェスチャーパターンを検索し、一致したジェスチャーパターンを前記物体のジェスチャーと判断するパターンマッチング手段(60)とを備える。また、前記移動方向特定部は、前記物体の移動方向を9種類(静止状態を含む)の何れかに近似して求める。
(もっと読む)
撮像装置、撮像制御方法及びプログラム

【課題】ユーザが所望する構図となる主被写体の画像を簡易に複数撮影する。
【解決手段】撮像系(11,12)と、撮像画角から移動体である主被写体を撮像する領域を指定するタッチ入力部24と、撮像系(11,12)から所定の速度で連続して画像を取得するイメージセンサ駆動部27及びAGC・A/D変換部13と、所定の速度で連続して取得する各画像中の主被写体の位置と指定した領域とに基づいて、撮像系(11,12)から画像を取得する速度を制御するCPU20と、制御された速度で撮像系(11,12)から所定の速度で連続して取得する画像を保持するバッファメモリ14とを備える。
(もっと読む)
画像認識方法、画像認識装置及び撮像システム
【課題】対象画像の探索処理に要する処理時間の削減効果を向上させる。
【解決手段】予め定められた対象物を表す対象画像を入力画像から抽出する画像認識方法は、対象画像を探索するための入力画像内の探索領域として予め設定された少なくとも1つの第1探索領域の数と、少なくとも1つの第1探索領域それぞれの大きさとの少なくとも1つを示す探索領域情報に基づいて、入力画像内の第2探索領域を設定する探索領域設定ステップ(S105)と、第2探索領域を探索することで、対象画像を抽出する探索ステップ(S106)とを含む。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両を撮像した画像の特徴点のオプティカルフローを利用して行う対象車両の自車両への接触の可能性の有無の判定の誤りを防止する。
【解決手段】検出部11は、自車両の車載カメラ2が対象車両を撮像して得た時系列の撮像画像から、撮像画像を構成している画素のオプティカルフローを求める。そして、このオプティカルフローの向きが、撮像画像における消失点から発散する方向に向いている画素の集合に基づき形成される検出領域を、撮像画像から検出する。方位角変化率算出部12は、前述の時系列の撮像画像に基づいて、検出領域についての撮像画像での水平線方向の端部を自車両から見たときの方位角の時間変化率を算出する。判定部13は、この方位角の時間変化率と所定の時間変化率閾値との大小比較の結果に基づいて、前述の検出領域に映っている対象車両についての自車両への接触の可能性の有無を判定する。
(もっと読む)
ユーザがコンピュータシステムとやり取りを行うことができる、ビデオストリームにおける動く非剛体オブジェクトをリアルタイムで検出し及び追跡する方法及び装置
【課題】本発明は、特に、イメージセンサの領域に位置するオブジェクトの動きに従ったソフトウェアアプリケーションとのやり取りの検出に関する。
【解決手段】第1の画像及び第2の画像を受信し、第1の画像の第1の関心のある領域を識別した後、第1の関心のある領域に対応する第2の関心のある領域を、第2の画像において識別する。第1の関心のある領域及び第2の関心のある領域が互いに比較され(440)、第1の関心のある領域及び第2の関心のある領域の対応するポイントの少なくとも一つの特徴の変化を特徴付ける関心のあるマスクを決定する。その後、オブジェクトの動きを、関心のあるマスクから決定する(445)。動きが分析され、それに応答して、予め決定された動作が、トリガがかけられ又はトリガがかけられない。
(もっと読む)
車両用画像処理装置および車両用画像処理方法
【課題】自車の曲進および振動による影響を考慮して対象物との衝突可能性を判定する車両用画像処理装置および車両用画像処理方法を提供する。
【解決手段】車両用画像処理装置において、カメラ11は、車両の周辺を撮像する。動きベクトル算出部21は、カメラ11により撮像された複数の画像間の動きベクトルを求める。スケールファクタ付き並進成分算出部23は、画像に含まれる対象物に対応する動きベクトルと車両の回転成分とにもとづいて、スケールファクタ付き並進成分を算出する。z位置取得部26は、カメラ座標系における対象物の光軸方向座標値を取得する。衝突判定部25は、カメラ11の中心から対象物までの距離を時間の関数としてあらわした式にもとづいて、カメラ11の中心から対象物までの最近接距離が所定の距離以下であるか否かを判定する。衝突危険度判定部28は、最近接距離が所定の距離以下であると、車両と対象物が衝突すると判定する。
(もっと読む)
測定対象物計数器および測定対象物を計数するための方法
【課題】本発明は、測定対象物計数器および測定対象物を計数するための方法に関する。
【解決手段】本方法は、所定の計数ビューの移動する画像を表す画像を取り込むステップと、所定の計数ビューの移動する画像内の移動領域を検出するステップと、移動領域の動きの速度を指し示す移動領域速度値を計算するステップと、所定の計数境界や、移動領域速度値や、寄与時間間隔dtに基づいて寄与ゾーンを繰り返して規定するステップと、規定した寄与ゾーン内に含有される移動領域の面積のサイズを表すサブ面積値を繰り返して取り出し、記録するステップと、複数の記録したサブ面積値を足し算することによって合計面積値を生成するステップと、合計面積値を基準測定対象物面積値で割り算することによって計数境界を通過した測定対象物の数を推定するステップとを備え、前記寄与時間間隔が、サブ面積値を取り出す2つの連続した行為間の時間間隔に対応する。
(もっと読む)
画像処理装置および方法、並びに、プログラム
【課題】評価対象の動きの協同性を定量的に評価することができるようにする。
【解決手段】撮像部が評価対象を撮像することにより得られた評価対象の画像データを用いて、評価指標データ生成部の動き検出部は、ブロック毎に評価対象の動きを検出し、相関算出部は、評価対象の動き量の、各ブロック間の相関係数を算出し、さらに、その平均値を算出する。評価部は、そのブロック間の相関係数を所定の関数で正規化し、さらに分散を算出し、その分散も所定の関数で正規化し、平均値や閾値を用いて、評価対象の動きのブロック間の相関を評価し、評価値を算出する。本開示は画像処理装置に適用することができる。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
コンテンツ紹介映像作成装置およびそのプログラム
【課題】本願発明は、コンテンツ紹介映像を素早く作成できるコンテンツ紹介映像作成装置を提供することを目的とする。
【解決手段】コンテンツ紹介映像作成装置1は、コンテンツを紹介する映像であるコンテンツ紹介映像を作成するものであり、パラメータ記憶手段10と、候補画像データベース20と、コンテンツ映像データベース30と、選出画像データベース40と、コンテンツ映像から候補画像を抽出する候補画像抽出手段50と、カット点を検出するカット点検出手段51と、選出画像を選出する基準となるスコアを算出するスコア算出手段61と、スコアが高い方から順に選出画像として選出する選出画像選出手段63と、選出画像を再生したコンテンツ紹介映像を作成する紹介映像作成手段70とを備える。
(もっと読む)
画像処理装置および方法、並びに、プログラム
【課題】ジェスチャ認識の性能およびユーザの利便性を向上させる。
【解決手段】目標物体認識部22は、画像入力装置11により撮像された入力画像データ内で所定の初期化動作をする物体を目標物体として認識する。ジェスチャ認識部23は、認識された目標物体を入力画像データ内で追跡することにより、対象機器13を操作するためのジェスチャを認識する。本発明は、例えば、ジェスチャにより操作を行うテレビジョン受像機、パーソナルコンピュータ等に適用できる。
(もっと読む)
画像処理装置、及び方法、プログラム並びに記憶媒体
【課題】データ量が少なくなるように必要な特徴領域のみ高画質化する。
【解決手段】動画データは、フレームメモリ14に格納される。被写体領域検出部27は、フレーム画像から被写体を含む被写体領域を検出する。移動方向検出部28は、被写体の移動方向を前後のフレーム画像の相関に基づいて検出する。分割部29は、移動方向に基づいてフレーム画像の画面を複数の領域に分割する。圧縮率設定部31は、複数の領域のそれぞれに、前記移動方向にある領域が高画質になるように圧縮率を設定する。圧縮部32は、複数の領域の画像それぞれを、前記圧縮率に従って圧縮する。
(もっと読む)
目標検出装置および目標検出方法
【課題】目標の広がりを抑制し、近接目標の検出を可能とする目標検出装置を得る。
【解決手段】センサ部101による観測画像の各画素の尤度比算出部103と、当該尤度比と1フレーム前の各画素のトラック・スコアとVSM値と追尾予測値を用いて現フレーム画像のトラック・スコアを算出するトラック・スコア算出部と、次フレーム画像での予測位置を算出する追尾処理部105と、現フレーム画像の各画素のVSM算出部106と、競合が発生した場合に、競合関係にある画素のうち初探知化条件を満たす画素の初探知化処理を行う初探知化処理部107と、現フレーム画像の各画素のVSM値の大きさに基づくトラック・スコアの補正処理を行うトラック・スコア補正部108と、補正処理された現フレーム画像の各画素のトラック・スコアに対して閾値処理を行って目標画素を検出する検出処理部110とを備えている。
(もっと読む)
撮像装置
【課題】ライブ画像のうち複数フレームを用いて動きベクトルを算出する回路において、高ゲイン時にノイズによる誤判定が発生する場合がある。
【解決手段】1つ目は、現在のフレームと直前のフレームとの差分信号から動きベクトルを求める際に、差分が小さい場合はクリップ回路により差分0にクリップする。クリップ回路のクリップ量はゲイン(感度)に応じ可変とする。2つ目は、画像生成(表示、保存)用のガンマカーブは画像生成用に最適化し、動きベクトル算出用のガンマカーブは動きベクトル算出用に最適化する。動きベクトル算出用のガンマカーブはゲイン(感度)に応じ可変とする。
(もっと読む)
動作解析装置
【課題】ユーザにとって、簡易に使用可能な動作解析装置を提供することである。
【解決手段】動作解析装置は、動画の入力を受け付けると(S11)、静止画を操作部に表示する(S12)。動作解析装置は、ユーザから静止画像上の任意の箇所を指定される(S13)。そうすると、指定点を中心とした半径rの範囲内において、第一の特徴点の検索を行う(S14)。そして、第一の特徴点を検索した静止画より時間的に後に隣り合う静止画において、第一の特徴点に対応する第二の特徴点の検索を行う(S15)。そして、特徴点の差を算出し(S16)、算出した差の平均値を求める(S17)。そして、連続する複数の静止画の隣り合う静止画像間の全てにおいて、特徴点の差をそれぞれ算出し、算出した差の平均値を求めると(S18において、YES)、求めた平均値を順に接続する。このようにして軌跡を作成する(S19)。
(もっと読む)
追尾装置および追尾方法
【課題】回路規模を大きくすることなく、動きベクトル検出の分解能以下の速度で被写体が移動している場合であっても被写体を追尾することが可能な追尾装置および追尾方法を提供する。
【解決手段】被写体を撮像し、フレーム画像を得る撮像素子13と、フレーム画像の内、追尾対象として設定された領域の画像を参照画像とし、この参照画像を記憶する第1の動き検出用メモリ41及び第2の動き検出用メモリ45と、現フレーム画像を評価画像として記憶するバッファメモリ41と、評価画像と隣接フレームの関係にある参照画像とに基づいて被写体の第1の動きを検出し、評価画像と離散フレームの関係にある参照画像とに基づいて被写体の第2の動きを検出する動きベクトル検出部47を有し、第1の動きが動きなしと検出し、第2の動きが動きありを検出した場合は、第2の動きの検出結果を動き量として判定する。
(もっと読む)
画像における移動物体の追跡方法及び装置
【課題】画像上で背景が動いても移動物体を追跡可能にする。
【解決手段】撮像装置により移動体の時系列フレーム画像を取得してメモリに格納し、これらから空間的差分フレームを生成する。更に該空間的差分フレーム画像の各画像を、複数画素からなるブロックに分割し、背景画像も移動物体の1つとみなして、ブロック単位で移動物体の識別符号を付与するとともにブロック単位で該移動物体の動きベクトルを求め、移動物体を追跡可能とする。
(もっと読む)
人物動作検出装置およびそのプログラム
【課題】カメラで撮影された映像から人物の動作を検出する人物動作検出装置を提供する。
【解決手段】人物動作検出装置1は、映像のフレーム画像ごとに、特徴点の軌跡を特徴点軌跡情報として生成する特徴点軌跡情報生成手段10と、特徴点の移動ベクトルの向きおよび大きさを、その取り得る範囲を予め定めた数に分割した範囲幅ごとに累計して軌跡特徴量を生成する特徴量抽出手段20と、複数の軌跡特徴量を予め定めた数のクラスタにクラスタリングしておき、既知の動作を構成する複数の軌跡特徴量をクラスタごとに累計した分布を予め学習データとして記憶する学習データ記憶手段40と、所定時間区間内の複数の軌跡特徴量から、当該軌跡特徴量が属するクラスタを累計した分布を生成し、学習データと比較することで、人物の動作を識別する動作識別手段30と、を備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】既存の手法と比較してより少ない演算量でジオメトリ動き分割を利用すること。
【解決手段】一実施形態に係る画像処理装置は、画像内に設定されるブロックを傾きを有する境界を用いて複数の領域に区分して各領域の動きベクトルを決定する動きベクトル決定部と、上記ブロックの外周と上記境界との複数の交点を指定する境界情報を生成する境界情報生成部と、を備える。また、他の実施形態に係る画像処理装置は、画像の符号化の際に上記画像内のブロックを複数の領域に区分した境界を、上記ブロックの外周と上記境界との複数の交点を指定する境界情報に基づいて認識する境界認識部と、上記境界認識部により認識された上記境界により区分される領域ごとに、動きベクトルに基づいて画素値を予測する予測部と、を備える。
(もっと読む)
101 - 120 / 1,211
[ Back to top ]