
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
61 - 80 / 1,211
オプティカルフロー生成装置、生成方法、プログラム
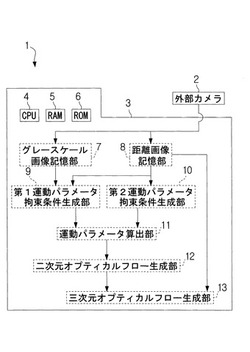
【課題】入力画像のより広範囲な領域でオプティカルフローを生成するための技術を提供する。
【解決手段】オプティカルフロー生成装置1は、外部環境の輝度と外部環境までの距離を測定して取得し、入力画像として、輝度画像データ及び距離画像データを生成可能な外部カメラ2と、輝度画像データと距離画像データと輝度勾配の拘束条件に基づいて第1運動パラメータ拘束条件を生成する第1運動パラメータ拘束条件生成部9と、距離画像データと距離情報の拘束条件に基づいて第2運動パラメータ拘束条件を生成する第2運動パラメータ拘束条件生成部10と、第1運動パラメータ拘束条件と第2運動パラメータ拘束条件に基づいて運動パラメータQを算出する運動パラメータ算出部11と、運動パラメータQに基づいて入力画像の二次元オプティカルフローを生成する二次元オプティカルフロー生成部12と、によって構成されている。
(もっと読む)
画像解析装置、画像解析方法、画像解析プログラム及び記録媒体

【課題】解析対象の動きをより正確に解析し、解析結果に対する把握性を向上させる装置及び方法等を提供する装置及び方法等を提供する。
【解決手段】画像解析装置SSは、矩形領域20に存在するベクトル情報を抽出し、前記抽出された所定範囲内に存在するベクトル情報に含まれる方向に基づいて、当該所定範囲内に存在するベクトル情報の一又は複数の代表的な方向を算出する。
(もっと読む)
画像領域追跡装置、画像領域追跡方法、および、コンピュータ・プログラム
【課題】画像特徴の類似する追跡対象領域と非追跡対象領域とが近接する画像を含む動画像において、追跡対象領域の追跡をより精度よく行う画像領域追跡装置を提供すること。
【解決手段】時系列的に連続する入力画像が入力される画像入力部101と、任意の入力画像において追跡対象モデルを取得する追跡対象モデル取得部102と、各入力画像において、該入力画像および他の入力画像間のフローベクトルに基づいて、該他の入力画像における追跡対象領域からの移動ベクトルを推定することにより該入力画像における追跡対象領域の概略位置を表す第1追跡位置を求める第1追跡部103と、各入力画像において追跡対象モデルの画像特徴に基づく追跡処理を用いて第1追跡位置を補正することにより第2追跡位置を求めるとともに、該入力画像における統合的な追跡位置である統合追跡位置を第2追跡位置に基づいて決定する第2追跡部104と、を備える。
(もっと読む)
画像処理システムおよび画像処理方法
【課題】 オプティカルフローによる画像処理のみでは移動体の移動方向を正確に認識することができない場合でも、移動体の移動方向を正確に認識することのできる画像処理システムを提供する。
【解決手段】 画像処理部6は、カメラ2により撮影された画像の所定の画像処理領域において、車両1を抽出する移動体抽出部7と、オプティカルフローを利用して画像処理を行うオプティカルフロー処理部8と、画像処理領域を車両1が進行する方向に複数の領域に分割し、これら各分割領域の境界部分において、時系列で各画像のフレーム間差分を求めるフレーム差分処理部9と、オプティカルフロー処理部8による認識結果とフレーム差分処理部9による認識結果に基づいて車両1の移動方向を認識する移動方向検出部10と、を備えている。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置
【課題】動き補償誤差を適切に減少させ、回路規模や計算量を大きく増加させることなく揺れを少なくしつつノイズを除去した動画像を得る。
【解決手段】基準画像と少なくとも一枚以上の参照画像とを加重加算する画像処理装置は、前記基準画像中の対象画素のコントラスト値を算出するコントラスト算出部(102)と、前記基準画像と前記参照画像との間の動きベクトルを算出する動きベクトル算出部(120)であって、前記コントラスト値を使用して前記動きベクトルの算出方法を変更する動きベクトル算出部と、前記動きベクトル算出部により算出された動きベクトルに基づいて、前記参照画像を前記基準画像に対して動き補償する動き補償部(106)と、前記基準画像と前記動き補償された参照画像とを前記対象画素ごとに加重加算する加重加算部(108)と、を備える。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法及び動きベクトル検出プログラム
【課題】移動物体上の動きベクトルを正確に検出することができる動きベクトル検出装置を提供する。
【解決手段】少なくとも2枚のフレーム画像を入力し、入力した2枚のフレーム画像から特徴点の動きベクトルを算出し、算出した動きベクトルと、最新時刻のフレーム画像とを出力する手段と、最新時刻フレーム画像と、動きベクトルから誤検出ベクトルと推測される動きベクトルをテンプレートマッチングを用いて検出し、入力された動きベクトルから、検出した誤検出ベクトルを除いた動きベクトルを出力する手段と、誤検出ベクトルを除いた動きベクトルについて、画像上での角度パラメータを算出し、算出した角度パラメータを各動きベクトルに唯一付与された動きベクトルIDを関連付けた特徴量リストを作成し、作成した特徴量リストを出力する手段と、特徴量リスト中の動きベクトルをクラスタリングすることにより、動きベクトルを決定して出力する手段とを備えた。
(もっと読む)
物体認識装置および物体認識方法
【課題】識別対象が画像上で変形する場合であっても、その識別対象の認識率を向上させることができる、物体認識装置および物体認識方法を提供する。
【解決手段】物体認識装置1は、記憶部20内に、認識対象の情報を示す監視物体情報210と、カメラ装置のパラメータを示すカメラ情報220を記憶している。そして、物体認識装置1は、監視物体情報210を用いて、監視空間上に検知領域を作成し、その作成した検知領域を、カメラ情報220を用いて、監視画像上の変形検知領域に変換する。物体認識装置1は、変形検知領域の画像情報100について特徴量を抽出し、認識対象の物体か否かを判定する。
(もっと読む)
物体検出装置
【課題】ユーザーによるモーション操作の検出精度を向上する。
【解決手段】所定のフレームレートで逐次撮影し、撮影画像を取得する撮影部と、前記撮影部で撮影する際の照明光を発光する照明部と、前記照明部が第1光強度と前記第1光強度よりも小さい第2光強度とを選択的に発光するように切換制御する制御部とを備える。
(もっと読む)
ビデオにおけるカメラ動きの型を検出する方法および装置
【課題】ビデオにおけるカメラの動きの型をより効果的かつ精確に検出するよう、ビデオにおけるカメラ動きの型を検出する方法および装置を提供する。
【解決手段】本発明の諸実施形態は、ビデオにおけるカメラ動きの型を検出する方法および装置を開示する。該方法は:ビデオにおける隣接するフレームどうしの間の第一のズーム動きパラメータを推定する段階と;前記第一のズーム動きパラメータが第一の事前設定条件を満たす場合に、対応するビデオ・セグメントにおいて事前設定された数の間隔をもつフレームどうしの間の第二のズーム動きパラメータを推定する段階と;前記第二のズーム動きパラメータが第二の事前設定条件を満たす場合に、前記ビデオ・セグメントのカメラ動きの型を、ゆっくりしたズームとして識別する段階とを含む。
(もっと読む)
移動物体監視システム
【課題】進入監視エリアに対する物体の移動を効果的に検知して、小さな処理負担で移動物体を監視できる移動物体監視システムの提供。
【解決手段】カメラの撮影視野内で進入監視エリアの外側に任意に設定される第1指標帯の画像領域である第1画像領域と、この第1指標帯との間に任意に設定される第2指標帯の画像領域である第2画像領域を撮影画像から抽出する画像抽出部と、第1・第2画像領域の画像特徴量である第1・第2画像特徴データを算定する特徴量算定部と、第1・第2画像特徴データに基づいて進入監視エリアに対する物体移動を評価するための物体移動評価データを演算する評価データ演算部と、物体移動評価データの経時変化に基づいて進入監視エリアへの物体の進入又は退出あるいはその両方を推定する物体移動推定部とが備えられている。
(もっと読む)
車載用表示装置
【課題】給電装置と充電器とが接近した場合においても、給電装置と充電器との位置合わせをする際の案内を行うこと。
【解決手段】車載用表示装置100は、地上の給電装置より非接触方式で車載蓄電池を充電する充電器を有する車輌に搭載される。カメラ101は、車輌の周囲の画像を撮影する。給電装置位置検出部102は、カメラにより撮影した周囲の画像における給電装置の相対位置を検出する。表示部105は、充電器の絶対位置及び給電装置位置検出部102により検出した給電装置の相対位置を、カメラ101により撮影した画像と共に一画面に表示する。
(もっと読む)
飛び出し歩行者判定装置及びプログラム
【課題】自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを精度良く判定するようにする。
【解決手段】エッジ抽出部22によって、複数の撮像画像の各々からエッジを抽出し、輪郭線生成部24によって、各撮像画像について、エッジのピーク点が画像上方へ向かって連続する歩行者候補の輪郭線を生成する。対応輪郭線検索部28によって、各撮像画像において対応する輪郭線を検索し、移動量推定部30によって、対応する輪郭線のペアの各々について水平方向の移動量を算出する。グルーピング部32によって移動量に基づいて、輪郭線を、複数の輪郭線群に分類する。グループサイズ算出部34によって、各輪郭線群について、高さ方向の大きさを算出する。飛び出し判定部36によって、各輪郭線群についての移動量と高さ方向の大きさとに基づいて、自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを判定する。
(もっと読む)
接近物体検知装置及び接近物体検知方法
【課題】低い処理負荷で、自車両と接近物体の位置関係及び自車両が移動しているか否かによらず、接近物体を検知できる接近物体検知装置を提供する。
【解決手段】接近物体検知装置は、異なる時刻に撮像部(2)により取得された車両(10)の周囲を撮影した二つの画像から特徴点を抽出する特徴点抽出部(432)と、その二つの画像間で同一の物体に関する特徴点からその物体の画像上の観測移動ベクトルを求める観測移動ベクトル算出部(435)と、撮像部(2)の移動に起因する各特徴点に対応する物体の見かけの移動ベクトルの最小値を算出する最小見かけ移動ベクトル算出部(434)と、特徴点ごとに観測移動ベクトルから見かけの移動ベクトルの最小値を減じて補正移動ベクトルを算出する移動ベクトル補正部(436)と、その補正移動ベクトルに対応する物体が車両(10)に接近する移動物体か否か判定する判定部(437)とを有する。
(もっと読む)
動き検出装置、動き検出方法及び動き検出プログラム
【課題】より少ない演算量でより正確にマッチングの信頼性を評価することができる動き検出装置を提供する。
【解決手段】動き検出装置は、差分算出部111、信頼度算出部112及び動き判定部113を備える。差分算出部111は、基準画像の注目ブロックと、注目ブロックと同一の大きさとなる比較画像における領域の集合との画素値の差分をそれぞれ算出する。信頼度算出部112は、比較画像において最も差分の小さいブロックを対象ブロックとし、該対象ブロックと注目ブロックとの差分である第1差分、及び、該対象ブロックの周囲に存在するブロックである周囲ブロックと注目ブロックとの差分である第2差分を用いて、注目ブロックにおけるマッチングの信頼度を算出する。動き判定部113は、信頼度に基づいて注目ブロックの動きを判定する。
(もっと読む)
画像処理装置および方法、記録媒体、並びに、プログラム
【課題】観察対象の動きの容易かつ非侵襲に観察することができるようにする。
【解決手段】観察対象である培養心筋細胞の動画像から、その培養心筋細胞の動きを、観察領域を複数に分割した部分領域毎に検出し、検出された部分領域毎の動きについて、その動き量の絶対値を算出し、算出された、部分領域毎の動き量絶対値およびその位置を表すマップを作成する。本開示は画像処理装置に適用することができる。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
61 - 80 / 1,211
[ Back to top ]