
Fターム[5L096HA04]の内容
イメージ分析 (61,341) | 認識 (5,606) | 複数イメージを取得し対比するもの (3,468) | 動画像解析 (3,285) | 移動体の抽出 (1,816) | 移動ベクトル (1,211)
Fターム[5L096HA04]に分類される特許
81 - 100 / 1,211
オブジェクト追跡装置、方法、及びプログラム
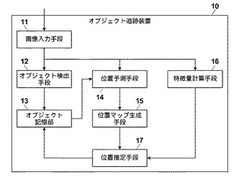
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
オプティカルフローに基づく傾きセンサー

【課題】動いているモバイルカメラの動きの様子を検出してアプリケーションへのユーザー入力を特定するための方法を提供する。
【解決手段】この方法は、装置に配置された画像センサーによって補足した画像にアクセスする段階と、捕捉した画像中に存在する静止した第1の特徴を識別する段階と、捕捉した画像中に存在する静止した第2の特徴を識別する段階と、捕捉した画像内での第1の特徴と第2の特徴との間の距離の変化に基づいて、装置の奥行き方向の動きの様子を検出する段階とを有する。第2の特徴は、第1の特徴とは異なるものであり、第1の特徴から離れた位置にある。奥行き方向は、第1の特徴および第2の特徴に対して近づいたり遠ざかったりする動きの方向である。
(もっと読む)
距離算出プログラム、距離算出方法及び距離算出装置
【課題】画像内から距離算出に適切な対象物を特定し、この対象物からカメラまでの距離を適切に算出すること。
【解決手段】カメラから画像を取得し、画像から、路面上にある特徴点を規定する抽出条件を満たす特徴点を抽出し、抽出された特徴点からカメラまでの実空間での距離を、画像内での特徴点の位置に基づいて求められる特徴点のカメラに対する実空間上での角度と、カメラの俯角及び路面からの距離を含む設置情報とを用いて算出する、処理をコンピュータに実行させる。
(もっと読む)
画像処理装置、及びその制御方法
【課題】回路規模の増大を抑制しつつ、画像間の位置合わせに必要な情報の取得の効率や精度を向上させる技術を提供する。
【解決手段】基準画像分割手段により得られた基準ブロック画像の各々について自己相関パラメータを算出する、前記自己相関パラメータ算出手段と、前記基準ブロック画像の所定領域と当該基準ブロック画像に対応する合成対象ブロック画像の所定領域との複数のペアの各々について、相関値算出回路を用いて2つの前記所定領域の画像間の相関値を算出し、当該算出された相関値に基づいて前記基準ブロック画像と前記合成対象ブロック画像との間の動きを示す動きベクトルを算出する動きベクトル算出手段であって、前記基準画像分割手段により得られた前記基準ブロック画像の各々について前記動きベクトルを算出する、前記動きベクトル算出手段と、を備える。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法および動画像符号化装置
【課題】 画質を維持しつつ、動きベクトルを検出する際の演算量の増加を抑制する。
【解決手段】 動きベクトル検出装置は、輝度画素および色差画素を含む2つの画像の不一致の程度を示すコストを、輝度画素を用いて計算し、動画像の符号化処理に必要な動きベクトルをコストに基づいて検出する動きベクトル検出部と、コストの計算に色差画素を用いるか否かを、2つの画像の一方の画像の色差画素の複雑さに基づいて判定する判定部とを有し、動きベクトル検出部は、判定部の判定結果がコストの計算に色差画素を用いることを示すとき、輝度画素および色差画素を用いてコストを計算する。
(もっと読む)
画像プロフィールに由来する物体検出
【課題】連続するビデオフレーム間の、あるいは画像対間の回転変化を発見するための方法を提供する。
【解決手段】効率的なフレーム間の回転の度合いが決定される。画像フレームの一対の大域的なXY整列が遂行される。X及びYの積分投影ベクトルの各々の少なくとも一部分が決定され、整列された大域的なベクトルは、局所的な有意な差分を明示する。X及びYの積分投影ベクトルの少なくとも一部分でのX及びYの位置に基づいて、画像フレームのシーケンス内における少なくとも一の移動物体の位置、相対速度、及び/又は近似の領域が決定される。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法
【課題】補償ウィンドウオーバーエクスカーションのヒストリー(history)に基づいてビデオフレームの場面で止められた/背景客体を代表する主要(principal)変換/補償変換P(n)を適応的にフィルタリングする段階を含むデジタルイメージ安定化方法を提供する。
【解決手段】デジタルイメージ安定化方法ビデオは、タイルモーションベクトル(Tile MV)グループの複数の変換のそれぞれと特徴点モーションベクトル(FP MV)グループのそれぞれとのスコアリングに基づいて、フレームの場面内の停止/背景客体を表わす主要変換を選択する段階と、停止(背景)グループのヒストリーと複数のモーションベクトルグループのそれぞれのヒストリーとに基づいて大型移動客体を除外させる段階と、を含む。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法
【課題】デジタルイメージ安定化を正確にすると同時に、カメラ動きまたは全体動きのために起こる動きの特徴点を識別して、その特徴点のモーションベクトルを得るビデオデータプロセッシング方法を提供する。
【解決手段】デジタルイメージ安定化方法は、最適の特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを誘導するための計算的に効率的なタイルベクトル基盤の階層的ブロック検索アルゴリズム、サイズ比率基準及びアングル差基準に基づいて選択された特徴点をグループ化する特徴点モーションベクトルグループ化/比較アルゴリズムからなる。
(もっと読む)
ジェスチャー認識装置、ジェスチャー認識方法及びそのプログラム
【課題】ジェスチャーの認識精度を向上する。
【解決手段】撮像した対象の動作に基づくジェスチャーを認識するジェスチャー認識装置において、ジェスチャーの認識条件を設定する認識条件設定部と、撮像された画像を複数の領域に分割した分割領域毎に、分割領域内の各画素の輝度の変化量に基づいて動き量を検出する動き量検出部と、動き量検出部により検出された動き量が所定の閾値以上である分割領域を動き領域として検出する動き領域検出部と、動き領域検出部により検出された動き領域からジェスチャーの認識に採用すべき分割領域である特定領域を検出する特定領域検出部と、少なくとも、特定領域検出部により検出された特定領域と、認識条件設定部により設定されたジェスチャーの認識条件とに基づいて、ジェスチャーを認識するジェスチャー認識部と、を備える。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、安定して移動体の運動を精度よく推定することができるようにする。
【解決手段】画像撮像部によって異なるタイミングで複数の画像を撮像し、運動推定候補算出部によって、撮像した複数の画像の各々から、複数の画像間で対応した対応点を検索し、検索された対応点の全ての組から、対応点の複数の組を繰り返し選択し、繰り返し選択された対応点の複数の組に基づいて、自車両の運動推定候補を各々算出する。
信頼度判定部42によって、運動推定候補の信頼度を判定し、運動候補選定部44によって、複数の運動推定候補の各々の信頼度に基づいて、複数の運動推定候補のうちの何れか1つを選定する。使用判定部48によって、運動推定候補の分散値に基づいて、運動推定候補の使用可否を判定し、運動推定候補が使用可能であると判定された場合に、選定された運動推定候補を、自車両の運動の推定結果として出力する。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
カラー動画像動き推定方法及びカラー動画像動き推定装置
【課題】 カラー動画像動き推定方法及びカラー動画像動き推定装置を提供すること。
【解決手段】本発明のカラー動画像動き推定装置は、入来するカラー動画像に対して、基準フレームの既存色プレーンを基準画像とし、前記基準フレームと隔離した基準フレームと同一色プレーンを持つ参照フレームの色プレーンを参照画像として仮動きベクトルを求める動き推定器(6)と、基準フレームと異なる色プレーンを持つ目的フレームと、前記参照フレームと、前記基準フレームの距離関係に応じて前記仮動きベクトルをスケーリングし、修正動きベクトルを得るベクトルスケーラ(8,10)と、基準フレームの既存色プレーンを基準画像とし、目的フレームの色プレーンを参照画像として、修正動きベクトルを中心にその周辺部に対して動きベクトルの再探索を行い、目的フレームの動きベクトルを得る動き再探索器(7,9)とを備えている。
(もっと読む)
デジタルイメージ安定化装置及び方法
【課題】デジタルイメージ安定化装置及び方法を提供する。
【解決手段】デジタルイメージ安定化(DIS)方法は、最適の特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを得るための計算的に効率的なタイルベクトル基盤の階層的ブロックマッチング検索アルゴリズム、ベクトルサイズ比率及びアングル差に基づいて選択された特徴点をグループ化するための特徴点モーションベクトルグループ化/比較処理を含む。
(もっと読む)
特徴検出装置、特徴検出方法、およびそのプログラム
【課題】 複数のカメラそれぞれで過去のフレーム結果と比較することで精度よく過去のフレームの結果を引継ぎ、特徴検出処理の処理負荷を低減する。
【解決手段】 ステレオ撮像した第1の映像と第2の映像からマーカを検出する探索ラインを設定し、探索ラインに沿って、第1の映像と第2の映像の両方の現在のフレームからマーカを検出し、フレームから検出したマーカの位置をマーカ情報として記録し、検出中に、検出中のフレームから検出したマーカの位置と、マーカ情報に基づく過去のフレームから検出したマーカの位置とが、予め設定された閾値以内であるか否かを判定し、閾値以内であると判定された数が、予め設定された個数以上であるか否かを判定し、個数以上であると判定された場合に、マーカの検出を中断し、過去のフレームのマーカ情報を現在のフレームのマーカ情報として記録する。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法及び補正装置及びプログラム
【課題】手ブレによる動きベクトルを検出した画面内の領域を随時利用して、動きベクトルの検出精度を高める技術を提供する。
【解決手段】処理対象の画像データを複数のブロック領域に分割し、分割されたブロック領域ごとに複数の動きベクトルを検出し、その大きさを階級とする度数分布上に振り分け、度数の大きさと階級間の距離に基づいて、動きベクトルを1つ以上のグループに分類する。これにより複数のグループに分類された場合、1つのグループを選択して代表ベクトルを決定する。また、1つのグループに分類された動きベクトルが検出されたブロック領域の位置情報を記憶しておき、位置情報に対応するブロック領域において検出された動きベクトルのみに基づく度数分布上で度数が最大となる動きベクトルを代表ベクトルに決定する。
(もっと読む)
侵入監視装置及び侵入監視方法
【課題】カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害検知が可能な侵入監視装置を提供する。
【解決手段】動物体検知部22の検知結果を基に小領域ごとに単位時間当たりの検知数を測定して人通りの多少を推定する動物体存在領域推定部23と、基準画像生成部21で生成された基準画像を基に明るさ変動に頑健な特徴点が多く存在する領域を選定する特徴量有効領域選定部24とを備え、撮像部1への妨害検知判定領域を動的に選定するようにした。これにより、カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害を検知することができる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】非接触で、かつ、容易に手の回転動作により入力情報を入力できるようにする。
【解決手段】指先位置計算部63は、画像内に含まれる手の指先の座標位置を取得する。回転方向特定部145、および回転速度計算部146は、それぞれ画像を所定の指先の回転動作の中心として設定される中心位置を基準として、設定される回転角度に応じて、画像を放射状に複数のエリアに区分するとき、取得された指先座標が属するエリアが隣接するエリアに移動するとき、回転動作の回転方向、および回転速度を計測し、回転動作による遊技者の入力情報として出力する。重心計算部163は、回転動作が1周する場合、順次取得される座標位置の重心位置を計算する。軸補正部164は、重心位置に、中心位置を移動させるように、画像が区分されたエリアを移動させてエリアを補正する補正量を計する。本発明は、遊技台の入力装置に適用することができる。
(もっと読む)
映像処理装置、映像処理方法及びプログラム
【課題】 本発明は映像中から所望の物体を効率的に検出することを目的とする。
【解決手段】 映像から物体を検知する検知部と、検知した物体が移動する移動方向を判定する判定部と、検知した物体が特定の物体であるかの検出を行うための検出処理を前記判定部が判定した前記物体の移動方向に応じて切り替える検出部とを有する。
(もっと読む)
ジェスチャー認識装置、方法、プログラム、および該プログラムを格納したコンピュータ可読媒体
【課題】自由空間を移動する物体の軌跡によって表わされるジェスチャーを認識するためのジェスチャー認識装置を提供する。
【解決手段】本発明のジェスチャー認識装置(1000)は、前記物体を撮像した動画像を構成するフレーム画像における前記物体の位置する画素座標を求め、撮像時刻に基づく時系列の画素座標データを生成する物体追跡手段(20)と、前記求めた画素座標における前記物体の移動方向を求め、時系列の移動方向データを生成する移動方向特定部(40)と、予め用意した移動方向の組み合わせからなる複数のジェスチャーパターンの中から前記移動方向データと一致するジェスチャーパターンを検索し、一致したジェスチャーパターンを前記物体のジェスチャーと判断するパターンマッチング手段(60)とを備える。また、前記移動方向特定部は、前記物体の移動方向を9種類(静止状態を含む)の何れかに近似して求める。
(もっと読む)
車両用画像処理装置および車両用画像処理方法
【課題】カメラにより取得された画像から路面の位置を求める。
【解決手段】車両用画像処理装置10は、記憶部13、路面検出部27、近似平面作成部31および路面データ更新部32を備える。記憶部13は、設定路面上の点についてカメラ座標系における画像上の座標値と光軸方向座標値とを関連付けた路面データを記憶する。路面検出部27は、スケールファクタつき相対並進成分と自車の並進成分とを用いてカメラ座標系における対象物の光軸方向座標値を算出するとともに、路面データにおいて対象物の画像上の座標値と関連付けられた光軸方向座標値を記憶部13から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると対象物を路面と判定する。近似平面作成部31は、複数の対象物のなす近似平面を表す式を立て、この近似平面上の点について近似平面データを求める。路面データ更新部32は、記憶部13の路面データを近似平面データで更新する。
(もっと読む)
81 - 100 / 1,211
[ Back to top ]