
Fターム[5L096JA03]の内容
Fターム[5L096JA03]の下位に属するFターム
複合類似度、混合類似度 (26)
内積(COS) (27)
一致画素数 (13)
不一致画素数 (11)
Fターム[5L096JA03]に分類される特許
81 - 100 / 1,366
特徴点位置決定装置、特徴点位置決定方法及びプログラム
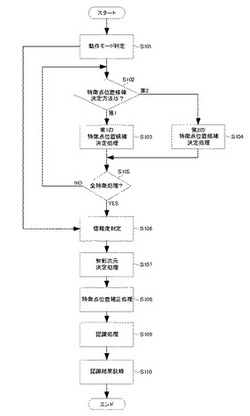
【課題】処理高速化等のために検出された特徴点位置候補の精度が低い場合であっても妥当な特徴点位置補正を実現し、所望の特徴点位置を決定できるようにする。
【解決手段】画像データから複数の特徴点の位置を決定する特徴点位置決定装置であって、特徴点の候補位置を求める特徴点位置候補決定手段と、前記特徴点位置候補決定手段で得られた特徴点位置候補の信頼度を判定する信頼度判定手段と、前記特徴点位置候補決定手段の結果を所定の補正条件に基づいて補正する特徴点位置補正手段を有し、前記信頼度判定手段の結果に基づいて前記補正条件を決定することを特徴とする。
(もっと読む)
データ処理装置、データ処理装置の制御方法、およびプログラム

【課題】パラメータのプリフェッチ効率を上げ、処理時間を短くする。
【解決手段】複数の入力データのそれぞれに対して辞書データを参照して入力データの所定領域ごとに1または複数の照合処理を順次行い、対象物体を認識するデータ処理装置であって、照合処理で参照する辞書データを取得する取得部と、取得部により取得された辞書データを複数保持可能な保持部と、保持部により保持された1つの辞書データを参照して入力データに対して照合処理を行う演算部と、演算部による処理結果を保持する履歴保持部と、演算部が後続の照合処理で参照する辞書データを、後続の照合処理の前に予め取得部が取得して保持部に保持するプリフェッチ処理を行うか否かを、処理結果に基づいて判定するプリフェッチ判定部と、プリフェッチ処理を行うと判定された場合に当該プリフェッチ処理を行う処理部と、を備える。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】入力画像に、所定の対象物が映っているか否かの判別の判別性能の低下を、容易に防止する。
【解決手段】補正部は、入力画像から抽出された特徴量を入力として、入力画像に所定の対象物が映っているか否かを表す弱仮説を出力する複数の弱識別器を有するアンサンブル識別器のパラメータを、補正情報を用いて補正する。判別処理部は、パラメータの補正後のアンサンブル識別器を用い、特徴量に対して、弱識別器が出力する弱仮説を積算し、その弱仮説の積算値に基づいて、入力画像に、対象物が映っているか否かを判別する。補正情報は、補正情報算出部54において、対象物を照明する光源に基づいて算出される。本技術は、例えば、入力画像に対象物が映っているか否かを判別する場合等に適用できる。
(もっと読む)
画像認識装置、画像認識装置の制御方法、およびプログラム
【課題】登録データ量が少なくても高精度に認識できる画像認識装置およびその制御方法を提供する。
【解決手段】辞書データとの照合により画像から対象物体を認識する画像認識装置であって、1以上の画像を取得する取得部と、画像のそれぞれから対象物体画像を検出する検出部と、対象物体画像から1以上の局所領域を切り出す切り出し部と、1以上の局所領域のそれぞれから対象物体を認識するための特徴量を画像ごとに算出する特徴量算出部と、画像ごとに算出された特徴量同士の類似度を局所領域ごとに算出する類似度算出部と、類似度が閾値以上となる特徴量同士がある場合には一方の特徴量を対象物体に対する辞書データとして局所領域ごとに登録する登録部と、を備える。
(もっと読む)
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、任意の低解像度の階層画像、例えば、参照画像の階層画像I2と登録画像の階層画像J2との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
芝刈り状況監視機能を有する自動芝刈り機
【課題】走行中の芝刈り状況を監視することが可能な芝刈り状況監視機能を有する自動芝刈り機を提供する。
【解決手段】少なくとも位置検出手段を含む各種センサを有する自律走行型の自動芝刈り機であって、走行車両の駆動系(アクセル)、制動系(ブレーキ)、及び操舵系(ステアリング)のうちの少なくとも一つを自動操作するためのアクチュエータと、アクチュエータにより走行車両を目標地点に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、芝刈り状況を判断するための画像処理ユニットと、センサの情報を基に各ユニットを制御するための各種演算及び演算に対応する処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出された登録画像と参照画像とが一致するか否かを判断する。
(もっと読む)
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
状態追跡装置、方法、及びプログラム
【課題】局所最適解に陥ることを防止して、追跡対象の状態を追跡する。
【解決手段】類似性データ記憶部34に、観測空間におけるパーティクルの類似性を定めた類似性データを記憶しておく。事後確率分布推定部26で、前時刻に事前確率分布予測部28で予測された事前確率分布と、観測取得部24で実際に取得された観測とに基づいて、追跡対象の状態の事後確率分布を推定し、事前確率分布予測部28で、事後確率分布推定部26で推定された事後確率分布に従ってサンプリングされた現在のパーティクル、及び類似性データに基づいて、現在のパーティクルと観測空間において類似するパーティクルを用いて、次時刻の追跡対象の状態の事前確率分布を予測する。
(もっと読む)
画像処理装置と画像処理方法およびプログラム
【課題】二画像間で同一オブジェクトの対応付けを行うために用いる特徴量を精度よく低処理コストで生成できるようにする。
【解決手段】特徴点検出処理部は、画像から特徴点を検出する。特徴量生成処理部は、検出した特徴点の位置を基準とした局所領域内における二画素の画素差分値を閾値と比較して、比較結果を示す二値化情報を特徴点に対応する特徴量の一成分として生成する。二画像間で特徴量が類似する特徴点の検出を行い、検出された特徴点の対応関係から同一オブジェクトの対応付けを行う。比較結果を示す二値化情報を特徴量の一成分として用いることで、二画像間で同一オブジェクトの対応付けを行うために用いる特徴量を精度よく低処理コストで生成できる。
(もっと読む)
オブジェクト識別装置、オブジェクト識別方法、及びプログラム
【課題】画像に含まれるオブジェクトの識別の精度をより高めることを目的とする。
【解決手段】入力画像に含まれる入力オブジェクトおよび登録画像に含まれる登録オブジェクトのオブジェクト間の変動量を検出するオブジェクト間変動量検出手段と、入力オブジェクトと登録オブジェクトとで、少なくとも1つ以上の対応する部分特徴量を抽出する部分特徴抽出手段と、オブジェクト間の変動量の大きさに応じて部分特徴抽出手段で抽出された部分特徴量を組み合わせる合成方法を決定し、決定した合成方法で部分特徴量を合成して合成部分特徴量を生成する部分特徴量合成手段と、合成部分特徴量を用いて、入力オブジェクトがどの登録オブジェクトに対応するかを識別する入力オブジェクト識別手段と、を有することによって課題を解決する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
消失点算出装置、消失点算出方法、及びプログラム
【課題】消失点を通る直線以外の直線が多数画像中に含まれていても、安定して消失点を算出することができる消失点算出装置を提供する
【解決手段】予め、複数枚学習用画像として準備し、それぞれのカテゴリ毎に学習画像からGlobal特徴量を算出し、その特徴量を学習して識別器を作成しておく。シーン構成推定手段21は、撮影された入力画像から特徴量を算出し、予め作成しておいたシーン構成判別器に投入し、該シーン構成判別器から出力されたカテゴリに応じて、消失点の存在する候補領域である消失点存在候補領域を推定する。消失点算出手段22は、消失点存在候補領域を通過する直線のみを、入力画像に直線検出等を施した画像から直線群として検出し、それらの直線群から優位な2直線の交点を消失点とする。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】より適切に被写体を検出することを目的とする。
【解決手段】入力映像の画素または部分領域ごとに特徴量を抽出し、特徴量と時間情報とを組みとした複数の状態を背景モデルとして記憶し、入力映像の特徴量と背景モデルとを比較して入力映像に類似する背景モデル中の状態を判定し、類似すると判定した状態の時間情報を更新し、類似すると判定した状態の時間情報に基づいて前景領域を判定し、前景領域に対して所定の被写体の検出を行い、検出の結果に基づいて背景モデル中の状態の時間情報を補正することによって課題を解決する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 認識対象物を識別するために有用な部分を効率的に学習する為の技術を提供すること。
【解決手段】 認識対象物をそれぞれ異なる視点位置から撮像して得られる複数枚の画像を取得し、複数の画像のそれぞれについて、該画像上に映っている認識対象物上で設定された箇所を設定箇所として受け付ける。複数の画像のそれぞれについて、該画像上の設定箇所に対して非設定箇所よりも多くの数の特徴点が設定されるように該画像上に複数の特徴点を設定し、特徴点における画像特徴量を用いて認識対象物を学習する。
(もっと読む)
オブジェクト識別装置、オブジェクト識別方法及びプログラム
【課題】オブジェクト識別の性能を低下させずに、処理負荷を低減できるようにする。
【解決手段】入力データを取得するデータ取得手段と、予め登録した登録データを用いて前記入力データのカテゴリを識別する識別手段とを有するオブジェクト識別装置であって、複数の局所特徴を前記入力データ及び前記登録データのそれぞれから抽出する局所特徴抽出手段と、前記入力データ及び前記登録データの対応する局所特徴の類似度を算出する類似度算出手段とを備え、前記類似度算出手段は、互いに関連付けられた複数の局所特徴の組において、ある局所特徴の時間的な変化に応じて、前記類似度の算出を省略する。
(もっと読む)
認識装置、認識方法及びプログラム
【課題】学習画像にあまり含まれない特徴パターンを含む画像が入力された場合においても、被写体を安定して検出することができるようにする。
【解決手段】入力画像から複数の特徴量を算出する特徴算出手段と、前記特徴量の夫々について事前に収集した画像及びその重みから認識対象に対する尤度を出力するように生成した認識モデルを用いて前記特徴量の尤度を求め、前記入力画像が前記認識対象かどうかを判定する判定手段とを備え、前記判定手段は、前記特徴量の値に該当する学習画像数が所定の値よりも少なく、かつ前記尤度の確信度が所定の値よりも高い場合に前記尤度の確信度が低くなるように補正する。
(もっと読む)
部品回転角度検出装置及び画像処理用部品データ作成装置並びに部品回転角度検出方法及び画像処理用部品データ作成方法
【課題】リード以外のコイル等の金属部分が露出する部品でも、リードのみを画像認識して部品の回転角度を精度良く検出できるようにする。
【解決手段】カメラで撮像したリード付き部品の画像の中からリード識別データとの類似度が所定値以上の部分をリードとして識別し、識別したリードの位置に基づいて当該部品の回転角度を算出する。ここで、リード識別データは、予めリードの先端画像をリードの方向(0°、90°、180°、270°)毎に学習して作成され、記憶装置に記憶されている。リード識別データとして、Haar−like特徴量、HOG特徴量、SIFT特徴量のいずれかが用いられる。検出した回転角度に応じて画像内における部品の回転角度を補正し、当該部品の特徴を抽出して画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を作成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】高精度かつ処理コストの低い被写体検出器を提供する。
【解決手段】入力画像に対して検出ウィンドウを走査する検出ウィンドウ走査手段と、検出ウィンドウ内の画像が、検出対象の被写体全体か否かを判定し、被写体候補を出力する被写体全体判定手段と、被写体候補同士に所定の重なりがある場合に重なりのある前記被写体候補の組みを出力する被写体候補重複判定手段と、予め検出ウィンドウ上に1つまたは複数の部分領域を設定し、各々の領域が被写体の一部であるか否かを判定する被写体部分判定手段と、被写体候補重複判定手段が出力する被写体候補の組みについて、被写体部分判定手段の結果に基づき被写体か否かを総合的に判定する被写体判定手段を有し、検出ウィンドウ走査手段は、入力画像に対する検出ウィンドウを相対的に複数のサイズで走査し、被写体候補の組みはそれぞれの組みにおいてサイズの異なる被写体候補を少なくとも1つ有する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段と、次元毎に算出される上記領域特徴量の差分値が所定値より小さいことを示す値を含む複数の値のうちの一つに当該差分値を、上記画像識別子の各次元の値として量子化する量子化手段とを備え、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
81 - 100 / 1,366
[ Back to top ]