
Fターム[5L096JA03]の内容
Fターム[5L096JA03]の下位に属するFターム
複合類似度、混合類似度 (26)
内積(COS) (27)
一致画素数 (13)
不一致画素数 (11)
Fターム[5L096JA03]に分類される特許
41 - 60 / 1,366
個体識別装置、個体識別方法、及びプログラム
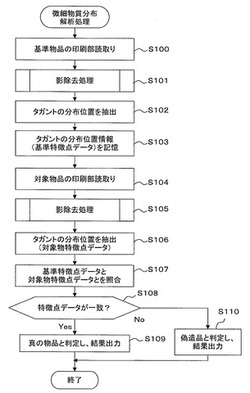
【課題】 タガントが付与された物品を識別する際に、タガントの影による分布位置の誤認識を防ぎ、精度よく特徴点抽出を行うことが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有するタガントをランダムに配置しておく。また個々の物品の撮影画像からタガントの影を除去した後、タガントの分布位置情報を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品についても同様に、撮影画像から影除去処理後、タガントの分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
特定領域抽出装置及び特定領域抽出プログラム

【課題】画像中の特定領域を効率的かつ高精度に抽出する。
【解決手段】入力画像に対する特定領域を抽出する特定領域抽出装置において、前記入力画像に対して所定の形状からなる窓領域を設定する窓領域設定手段と、前記窓領域設定手段により得られる窓領域を前記入力画像の左右方向及び上下方向に対してそれぞれ所定間隔で移動させ、各移動位置における前記窓領域に含まれる画像特徴を取得する特徴取得手段と、前記窓領域の移動に伴う前記特徴取得手段により得られる画像特徴の変化量に基づいて1又は複数の境界を設定する境界設定手段と、前記境界設定手段により設定される境界に基づいて特定領域を抽出する特定領域抽出手段とを有することにより、上記課題を解決する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体
【課題】反転関係にある画像同士が類似していると判断することができる画像類似度算出装置、画像類似度算出方法、画像類似度算出プログラム及び記録媒体を提供する。
【解決手段】画像類似度算出装置1は、入力画像30と参照画像31との類似度を算出する装置である。この装置は、局所特徴量抽出部12及び類似度算出部14を備える。局所特徴量抽出部12は、入力画像30及び参照画像31の特徴点を取得し、入力画像30及び参照画像31の特徴点ごとに回転及び反転に対して不変となる特徴量を記述する。類似度算出部14は、入力画像30及び参照画像31の特徴点ごとの特徴量に基づいて、入力画像30と参照画像31との類似度を算出する。
(もっと読む)
オブジェクト追跡装置
【課題】ズーム処理によって対象オブジェクトのサイズが変化しても、高速かつ高精度に対象オブジェクトを追跡することができるオブジェクト追跡装置を提供する。
【解決手段】探索領域設定部9は、現時点のフレーム画像のズーム倍率が前時点のフレーム画像のズーム倍率と異なる場合には、前時点のフレーム画像におけるオブジェクト領域、前時点のフレーム画像におけるズームの中心座標、前時点のフレーム画像のズーム倍率と現時点のフレーム画像のズーム倍率との比に基づいて、現時点のフレーム画像におけるオブジェクトの探索領域を設定する。正規化部10は、現時点のフレーム画像に含まれるオブジェクトの探索領域の画像を固定サイズに正規化する。マッチング部11は、正規化された探索領域の画像の中から、テンプレート画像と類似するオブジェクト領域を検索する。
(もっと読む)
パターン識別方法、パターン識別装置、およびプログラム
【課題】識別性能を向上し、訓練処理と識別処理を高速化することができるパターン識別装置を提供する。
【解決手段】本発明のパターン識別装置20は、直交化勾配ベクトル算出部150が、基底ベクトルから、正規直交化行列を生成し、結合係数決定部200が、トレーニングサンプルと基底ベクトルから、結合係数βを求め、直交化勾配ベクトル算出部150が、トレーニングサンプルと基底ベクトルと結合係数βから、結合係数dと結合係数rを算出し、トレーニングサンプルと基底ベクトルと結合係数rと正規直交化行列から、結合係数r^を算出し、新規基底ベクトル決定部350が、トレーニングサンプルと結合係数dと結合係数r^から、新規基底ベクトルを求め、基底ベクトルに追加し、直交化勾配ベクトル算出部150が、更新された基底ベクトルを用いて、正規直交化行列を更新する。
(もっと読む)
画像識別情報付与プログラム及び画像識別情報付与装置
【課題】画像に関する相関情報を用いて画像に対して複数の識別情報を付与する画像識別情報付与プログラム及び画像識別情報付与装置を提供する。
【解決手段】画像識別情報付与装置1は、複数のクエリ画像120からそれぞれ特徴量を抽出する特徴抽出部3と、特徴抽出部3によって抽出された特徴量から学習モデル130を用いてクエリ画像120に付与すべき複数のラベルに対してそれぞれ量子化値を計算するアノテーションスコア量子化部5と、ラベルの数に対応した数の確率場モデルを有し、ラベル毎の量子化値を複数の確率場モデルに入力し、クエリ画像120毎に複数のラベルに対するスコアを出力するラベル推定部7とを備える。
(もっと読む)
画像比較方法、及び画像比較装置
【課題】同一の原図画像からラスタ変換された2つのラスタ画像を比較する際に、ラスタ変換の描画手法による微小な相違点を相違領域として検出しない画像比較方法、及び画像比較装置を提供する。
【解決手段】画像比較方法は、第1ベクタ画像を第1描画手法によって第1ラスタ画像にラスタ変換し(20)、第1ベクタ画像を変換して得られた第2ベクタ画像を、第1描画手法とは異なる第2描画手法によって第2ラスタ画像にラスタ変換し(14)、第1ラスタ画像に対して収縮フィルタ処理又は膨張フィルタ処理を施して(22)第1膨張画像を生成し、第2ラスタ画像に対して収縮フィルタ処理又は膨張フィルタ処理を施して(16)第2膨張画像を生成し、第2膨張画像と第1ラスタ画像とを、第1膨張画像と第2ラスタ画像とを比較して(24)、互いに相違する第1及び第2相違領域を検出する。
(もっと読む)
店舗システム及びプログラム
【課題】登録・精算にかかる商品以外の物品が登録・精算時に持ち込まれた場合に、その物品に関する報知を行うことを可能とする。
【解決手段】実施形態の店舗システムは、撮像手段が撮像した画像を出力する画像出力手段と、出力された画像の特徴量を読み取ることによって特定の物体を認識する物体認識手段と、認識された物体が、売上登録に用いる情報を記憶する商品ファイルに含まれる商品以外の物体である場合に、売上登録にかかる商品以外の物体を認識したことを報知する報知手段と、を備える。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像評価方法、描画条件選択方法、画像評価プログラム、描画条件選択プログラム
【課題】マスク上に描画されたマスクパターンをより高い精度でかつ容易に評価可能な画像評価方法及び画像評価プログラムを提供する。また、所望の図形を描画可能な描画条件を算出する描画条件選択方法及び描画条件選択プログラムを提供する。
【解決手段】画像評価方法及び画像評価プログラムは、基準図形と描画図形の面積が同一又は略同一であるか否かを判定し、両図形の輪郭線から算出された点列を主成分分析して得られる第1主成分及び第2主成分との長さの比である基準図形長短比と描画図形長短比を用いて両図形の概形が類似であるか否かを判定し、基準図形及び描画図形の概形が類似であり、かつ、その面積が同一であると判定した場合に、基準図形及び描画図形が一致すると判定するものとした。
(もっと読む)
画像認識装置および画像認識方法
【課題】画像から特定の幾何学的図形を構成する物体に対応する領域を精度よく抽出する装置および方法を提供する。
【解決手段】画像認識装置は、画像からエッジセグメントを抽出するエッジ抽出部と、エッジ抽出部により抽出されたエッジセグメントを利用して形成される予め決められた幾何学的な図形の候補の組合せを取得する取得部と、取得部により取得された各組合せについて、図形の候補の外周が抽出されたエッジセグメントによってカバーされる程度を表す再現率、および、抽出されたエッジセグメントが図形の候補として利用される程度を表す適合率をそれぞれ算出する算出部と、再現率および適合率に基づいて決まる評価値が最大となる組合せに含まれる図形の候補に対応する領域を抽出する画像抽出部を有する。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置
【課題】時系列に入力されるフレーム画像において適切に主要被写体を追跡すること。
【解決手段】被写体追跡プログラムは、時系列で入力される各フレーム画像の色情報および輝度情報に基づいて複数の要素画像を生成する要素画像生成処理と、複数の要素画像をそれぞれ2値化して複数の2値化要素画像を生成する2値化要素画像生成処理と、複数の2値化要素画像を論理積演算する論理積演算処理と、論理積演算後の2値論理積画像に対するラベリング処理に基づいて、各フレーム画像における主要被写体の位置を特定する特定処理と、特定処理で特定された範囲と所定範囲との論理積演算に基づいて特定された範囲を縮小する縮小処理と、前フレーム画像において縮小処理で縮小された範囲を膨張させて所定範囲を得るモルフォロジー処理と、をコンピュータに実行させる。
(もっと読む)
姿勢判定方法、プログラム、装置、システム
【課題】本発明は、ユーザおよび用途を限定しないNUI(Natural User Interface)を提供することを目的とする。
【解決手段】本発明においては、予め定義された基準姿勢とユーザがとった姿勢の間の類似度を各姿勢の3次元骨格モデルを構成する3次元ベクトルの内積を用いた評価関数によって計算し、所定の閾値に基づいて姿勢の類似度を判定する。本発明においては、2つのパラメータ(基準姿勢の3次元ベクトルおよび類似度の閾値)をユーザが自由に設定することができるので、それぞれのユーザの条件(身体条件・環境条件)および用途に合致したNUIを容易に構築することができる。
(もっと読む)
商品情報取得システムおよび商品情報提供サーバ装置
【課題】携帯端末のユーザが欲しい商品情報をサーバ装置から簡易かつ迅速に提供する。
【解決手段】商品情報提供システム1は、スマートフォンや携帯電話等からなる携帯端末2と、携帯端末2との間で無線通信を行うサーバ3と、サーバ3に接続される商品特徴量DB4と、同じくサーバ3に接続される商品情報DB5と、自動フィルタリングDB6と、を備える。携帯端末2で撮影した商品画像またはその特徴量をサーバ3に送信して、サーバ3側で商品を特定して、その商品情報を携帯端末2に送り返すため、携帯端末2のユーザは、撮影した商品の商品情報を、携帯端末2を介して手軽に入手でき、利便性が向上する。また、店舗側は、商品ごとに、異なる複数の言語で商品説明を行わなくて済み、商品管理が容易になり、外国語を話せる販売スタッフの数も減らすことができて、人的コストも含めた販売費の削減が図れる。
(もっと読む)
画像処理装置
【課題】予め想定された範囲外の要因が生じた場合でもパラメータの適正化を図ることができる。
【解決手段】テンプレートデータを用いてサーチ画像から対象物を認識するテンプレートマッチング処理を行う画像処理装置19において、テンプレートマッチング処理を行うためのパラメータを記憶するパラメータ記憶部14と、テンプレートマッチング処理における基準性能値を記憶する性能記憶部39と、テンプレートマッチング処理が終わるとその性能値を計測する性能値計測部43とを備え、性能値計測部で計測された性能値が基準性能値を下回る場合に、テンプレートマッチング処理のパラメータを調整する調整部38を備えている。
(もっと読む)
識別装置及び識別プログラム
【課題】検出処理を高速化する。
【解決手段】識別装置10は、入力データの特徴量を生成する特徴量生成部3と、特徴量が第1閾値と第2閾値とで挟まれた所定範囲内に存在するか否かを判定する判定部4と、検出対象と非検出対象との識別性能が高いほど重みが大きくなるように設定された重み設定部5とを備えた弱識別器2と、弱識別器2を複数備え、各弱識別器2における特徴量の判定結果と重みとの積算値の線形和に基づいて入力データが検出対象であるか否かを識別する強識別器1とを有する。
(もっと読む)
画像処理方法およびシステム
【課題】2D被写体の検出と分離、カメラ姿勢推定、3D形状位置合わせおよび3D画像認識を含む画像処理における被写体の姿勢を推定する方法を提供する。
【解決手段】画像データを分析するための装置はプロセッサを含む。該プロセッサは、被写体の姿勢の複数の予測を得るために前記画像データを分析するよう構成され、前記予測は前記被写体の予測姿勢のインジケーションを含んでおり、前記予測姿勢は共通の座標系の位置、方向、スケールに関して表現され、2つの被写体姿勢間の距離を計算することで前記予測姿勢を比較することにより前記予測をグループ化するように構成され、前記距離は距離関数を用いて計算される。
(もっと読む)
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
動きベクトル導出装置および方法
【課題】あるブロックについて動きベクトルの候補が複数存在する場合においても、その複数の動きベクトルの中から画質劣化を最小とする動きベクトルを精度良く導出する。
【解決手段】動きベクトル導出部14は、二つの画像フレーム内の対応するブロック間の動きベクトルを導出する。候補ベクトル生成部20は、動きベクトルの計算対象ブロックについて複数の候補ベクトルを生成する。ブロックテクスチャ抽出部22は、候補ベクトルが生成された画像フレーム内のブロックテクスチャを抽出する。輝度差計算部30は、抽出された複数のブロックテクスチャについて、ブロックテクスチャを構成する画素の隣接画素間の輝度差の累積値を計算する。動きベクトル選択部26は、累積値の最大値が残りの累積値よりも所定倍以上の大きさであるとき、最大値が得られたブロックテクスチャから生成された候補ベクトルを前記対象ブロックの動きベクトルとして選択する。
(もっと読む)
41 - 60 / 1,366
[ Back to top ]