
Fターム[5L096JA03]の内容
Fターム[5L096JA03]の下位に属するFターム
複合類似度、混合類似度 (26)
内積(COS) (27)
一致画素数 (13)
不一致画素数 (11)
Fターム[5L096JA03]に分類される特許
21 - 40 / 1,366
個体識別装置、個体識別方法、及びプログラム
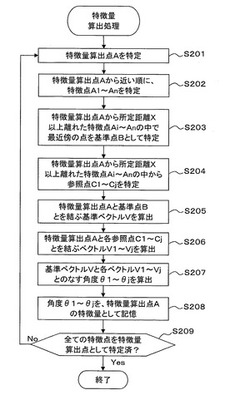
【課題】 画像取り込みの際などに起きる画素のずれによって特徴点の位置がずれてしまった場合であっても、精度良く個体識別を行うことができる個体識別装置等を提供する。
【解決手段】 個体識別装置100は、抽出された特徴点群の中から特徴量算出点Aを1つ特定し(S201)、特徴量算出点Aを除いた特徴点群の中から、特徴量算出点Aから近い順に特徴点A1〜Anを特定する(S202)。次に、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中で、特徴量算出点Aから最近傍の点を基準点Bとして特定し(S203)、特徴量算出点Aから所定距離X以上離れた特徴点Ai〜Anの中から、所定数j個の参照点C1〜Cjを特定する(S204)。そして、特徴量算出点A、基準点B、及び参照点C1〜Cjの3つの点を用いて、特徴量算出点ごとに特徴量を算出する。
(もっと読む)
画像処理装置及びその制御方法

【課題】 撮影機能を持つ携帯デバイスが増えているが、それぞれが持つ演算能力や搭載メモリは異なり、局所特徴量の算出処理やその特徴量記述サイズはこれらの機器のリソースに応じたものが好ましい。他方、PCやサーバーにおいては、携帯端末ほど局所特徴量の算出処理やその特徴量記述サイズの制約は受けない。この様な環境下において、検索精度を犠牲にすることなく、機器リソースに応じた特徴量記述サイズの制御が必要である。
【解決手段】 局所特徴点の個数が画像の局所特徴量記述サイズの支配的なファクターになると考え、局所特徴点および局所特徴量の再現性を評価し、再現性の高いものから順に局所特徴量記述サイズになるまで記述することで、局所特徴量記述サイズと検索精度の両立を図る。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
オプティカルフロー検出装置及び検出方法
【課題】本発明は、マッチング探索処理中に無効フローを除去し、マッチング探索処理の処理時間の短縮を図ることを目的としている。
【解決手段】このため、オプティカルフロー検出装置において、マッチングスコア算出手段とマッチングスコア差分算出手段とマッチングスコア差分判定手段とフロー内積算出手段とフロー内積評価手段とを備え、マッチング探索時、差分がしきい値以下の時に、フロー内積算出手段により内積値を算出し、フロー内積評価手段により無効フロ一を除去する。また、オプティカルフロー検出方法において、現在画像の画像データと過去画像の画像データから前回と今回のマッチングスコアの差分を算出し、マッチング探索時、差分がしきい値以下の場合に、前回までのオプティカルフローと今回のオプティカルフローで内積値を算出し、内積値でオプティカルフローの方向性を判定して無効フローを除去する。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、誤対応付けの影響を減らすことができる画像マッチング装置を提供する。
【解決手段】クエリ画像と、検索対象データベース内に予め保存された保存画像のそれぞれから抽出した特徴箇所毎に特徴量を算出する特徴表現手段と、クエリ画像と、保存画像間において、特徴表現手段により算出した特徴量からスコアを算出し、クエリ画像の特徴箇所に対応する保存画像へのスコア投票結果に基づき画像マッチングを行う照合手段とを備えた画像マッチング装置であって、照合手段は、クエリ画像と保存画像間において特徴箇所の対応付けの確からしさを示すスコアを投票し、スコア投票結果に基づき画像マッチングを行って、クエリ画像とマッチングする保存画像を求める。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
自動認識処理システム、情報処理端末、自動認識処理方法、及びプログラム
【課題】コストをかけずに、数多くの種類の対象物を精度よく自動認識することが可能な自動認識処理システム等を提供する。
【解決手段】撮影部25であるカメラを起動すると、情報処理端末3は発光体11の明滅周期をサーバ5から受信、設定し、対象物9の動画撮影を開始する。情報処理端末3は、前後の撮影画像31から差分画像32を生成してシンボル認識処理を行い、差分画像32内にシンボル候補が4点あるか判定する。シンボル認識処理の認識結果が成功すると、情報処理端末3は差分画像32から認識領域33を抽出し、サーバ5に送信する。サーバ5は、情報処理端末3から受信した認識領域33のデータベース照会処理を行う。情報処理端末3は、サーバ5からデータベース照会の結果を受信し、データの表示等を行う。
(もっと読む)
映像検索装置およびプログラム
【課題】リファレンス映像の時間軸上の一部分を切り出したり、リファレンス映像にテロップやロゴが挿入されたりした映像を含むクエリ映像であっても、そのクエリ映像の検索を可能とし、その処理を高速に行なう。
【解決手段】データベース15に格納されているリファレンス映像から、クエリ映像を検索する映像検索装置であって、前記クエリ映像を一定時間長のセグメントに分割し、前記各セグメントから予め定められた数のフレームを選択する映像分割部11と、前記選択されたフレームから映像の特徴を示す特徴量を抽出する特徴量抽出部12と、前記抽出した特徴量を1つ以上の量子化識別子に変換する特徴量量子化部13と、前記量子化識別子に対応する転置インデックスを構成するリストに前記選択されたフレームの映像識別子と時刻情報を格納する特徴量蓄積部14と、を備える。
(もっと読む)
画像類似度判定装置、画像類似度判定方法及び画像類似度判定プログラム
【課題】局所的な特徴量を算出した複数の特徴点群の系列を用いて一括して画像間の幾何的な対応を求めて、より計算効率が良く、また、より精度良く画像同士を対応づけして類似度の判定を行う。
【解決手段】複数の画像の類似度を判定する画像類似度判定装置であって、複数の画像それぞれから特徴点群を検出する特徴点検出手段と、複数の画像のそれぞれから検出した特徴点群から、所定のサンプリングを行って、順序関係を持たせた特徴点の系列情報を複数の画像それぞれについて作成して出力する特徴点サンプリング手段と、複数の画像それぞれについて、順序関係を持たせた特徴点の系列情報を特徴ベクトル化して出力する特徴ベクトル生成手段と、複数の画像の特徴ベクトルそれぞれについて線形変換を施して出力する線形変換手段と、線形変換の結果を用いて複数の画像の類似度を判定する類似度判定手段とを備える。
(もっと読む)
画像認識方法、画像認識装置及びプログラム
【課題】高速に認識処理を実行する場合であっても、認識精度の低下を軽減できるようにする。
【解決手段】判定された処理モードが認識処理の場合、第1の特徴点位置検出工程による処理を選択し、当該第1の特徴点位置検出工程の結果及び特徴量算出位置決定工程の結果に基づいて算出した特徴量と前記登録データに基づいて画像データを認識する。一方、判定された処理モードが登録処理の場合は、前記第1の特徴点位置検出工程よりも高精度に特徴点の位置を検出する第2の特徴点位置検出工程による処理を選択し、当該第2の特徴点位置検出工程の結果及び特徴量算出位置決定工程の結果に基づいて算出した特徴量から登録データを生成する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
画像検索装置、画像検索方法及びプログラム
【課題】ユーザにとって心的な負荷が軽減される検索結果を簡単な処理により得ることができるようにする。
【解決手段】検索に必要な局所特徴量の算出の過程で回転角度を算出するようにし、検索結果として画像を表示する際には、推定された回転角度に基づいて回転正規化の要否を判定し、回転角度が所定値以上である場合には、クエリ画像を基準にしてサンプル画像を回転正規化した後に表示するようにして、検索結果を確認する時に、心的回転による負荷を軽減するとともに、計算量を抑えて検索結果を得ることができるようにする。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】画像の領域分割の処理時間を短縮させる技術を提供する。
【解決手段】画像に対して複数の局所領域を設定する設定部と、局所領域のそれぞれから特徴量を抽出する抽出部と、それぞれの特徴量に対するそれぞれの確率密度に基づいて、局所領域同士の非類似度を算出する算出部と、非類似度に基づいて複数の局所領域を領域群として統合する統合部と、を備える。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 タガントが付与された物品を識別する際に、タガントの影による分布位置の誤認識を防ぎ、精度よく特徴点抽出を行うことが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有するタガントをランダムに配置しておく。また個々の物品の撮影画像からタガントの影を除去した後、タガントの分布位置情報を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品についても同様に、撮影画像から影除去処理後、タガントの分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
21 - 40 / 1,366
[ Back to top ]