
Fターム[5L096JA03]の内容
Fターム[5L096JA03]の下位に属するFターム
複合類似度、混合類似度 (26)
内積(COS) (27)
一致画素数 (13)
不一致画素数 (11)
Fターム[5L096JA03]に分類される特許
121 - 140 / 1,366
物品検出装置および静止人物検出装置
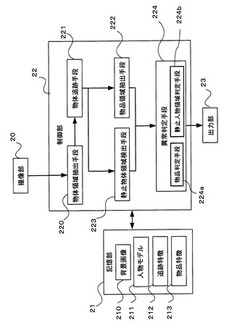
【課題】持ち込み物品を効果的に検出する。
【解決手段】物品検出装置は、監視領域を撮影した監視画像を順次取得する撮像部20と、監視領域の背景が撮影された背景画像と人物の外形を模した人物モデルを記憶する記憶部21と、静止している物品を検出する制御部22と、を具備する。制御部22は、監視画像と背景画像から変化領域を抽出する変化領域抽出手段220と、変化領域に前記人物モデルを重ね当該変化領域の内側でかつ当該人物モデルの外側である物品領域の特徴を記憶部21に記憶する物品領域抽出手段222と、順次取得された画像にて変化領域を時間的に追跡し変化領域が静止しているかを判定し静止物体領域を検出する静止物体領域検出手段223と、静止物体領域が検出されると、静止物体領域が前記物品領域の特徴を有するかを判定し物品領域の特徴を有する場合に当該静止物体領域が物品であると判定する異常判定手段224とを有する。
(もっと読む)
類似画像検索装置

【課題】クエリー画像に対して人間が類似していると感じる画像を漏れなく出力することが可能な類似画像検索装置を提供すること。
【解決手段】類似画像検索装置500は、互いに類似する画像が同一のクラスタに属するように、複数の画像を、クラスタリング処理を行うことにより複数のクラスタに分類する画像分類部501と、クエリー画像を受け付けるクエリー画像受付部502と、上記複数のクラスタのうちの、上記受け付けられたクエリー画像と類似する画像が属するクラスタを特定するクラスタ特定部503と、上記複数の画像のうちの、上記特定されたクラスタに属する画像を出力する画像出力部504と、を備える。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】軽い負荷で画像をトラッキングすることができるようにする。
【解決手段】トラッキングの対象であるオブジェクトを含む対象画像と、所定のフレームの対象画像と比較される比較領域の画像である比較画像との、第1の特徴量のマッチング度と第2の特徴量のマッチング度を所定の混合率で混合して得られる信頼度の、混合率を変化させた場合の和で表される評価値が計算され、評価値が最大になるときの混合率が求められる。評価値が最大になるときの混合率が設定された信頼度に基づいて対象画像に対応する画像が検出される。
(もっと読む)
学習装置、方法及びプログラム
【課題】識別基準の学習に伴うコストを削減し、認識に好適な識別基準を得る。
【解決手段】実施形態の学習装置は、選択部と、学習部と、評価部と、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルを記憶する学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、識別基準群を得る。評価部は、各評価サンプルが複数のカテゴリのいずれかに分類される複数の評価サンプルを記憶する評価サンプル記憶部からカテゴリが異なる2以上の評価サンプルを取得し、取得した前記2以上の評価サンプルを用いて前記識別基準群に含まれる識別基準を評価し、前記識別基準群から評価結果に応じた複数の識別基準を取得して当該複数の識別基準を含む評価基準を生成する。
(もっと読む)
画像認識装置
【課題】対象物の認識での誤認識を低減すると同時に、認識処理のコストを抑制することができる画像認識装置を提供すること。
【解決手段】認識領域選択部12は、画像撮影部11により取得された画像における特徴的な領域を選択する。選択領域有効化部13は、特徴的な領域のみが認識対象とされるように有効化する。画像特徴量算出部14は、有効化された領域における画像特徴量を算出する。画像特徴量比較部16は、算出された画像特徴量と予め用意された参照画像の画像特徴量を比較する。結果出力部17は、算出された画像特徴量と最も近似するとされた画像特徴量を有する参照画像の識別子を認識結果として出力する。認識結果に関連付けられたメディアを表示させることもできる。
(もっと読む)
認識装置、方法及びプログラム
【課題】認識精度と認識効率を両立する。
【解決手段】実施形態の認識装置は、生成部、抽出部、変換部、計算部、出力制御部、登録部を備える。生成部は、学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行い、選択した複数のグループ毎に識別基準を学習し、複数の識別基準を含む評価基準を生成する生成処理を行う。抽出部は、物体を含む画像の第1特徴量を抽出する。変換部は、評価基準を用いて第1特徴量を第2特徴量に変換する。計算部は、第2特徴量と基準特徴量を用いて認識テーブル内のカテゴリに対する物体の類似度を計算する。出力制御部は、認識結果を出力部に出力させる。登録部は、第2特徴量を基準特徴量として物体のカテゴリに対応付けて認識テーブルに登録し、第1特徴量を物体のカテゴリに属する学習サンプルとして学習サンプル記憶部に登録する。生成部は、所定の条件が成立すると生成処理を再度行う。
(もっと読む)
画像処理システム、顔情報蓄積方法、画像処理装置及びその制御方法と制御プログラム
【課題】顔情報そのものを蓄積せずに、顔のパーツ、属性情報および関連情報で顔情報の特徴を蓄積して照合し、記憶媒体や通信媒体のリソースの有効利用を図る。
【解決手段】撮影された画像から顔情報を検出して分析するための画像処理装置であって、撮像された画像から顔領域を検出する顔検出手段と、検出した前記顔領域から顔のパーツを検出するパーツ検出手段と、検出した前記パーツの領域、前記パーツの周辺領域、前記顔領域の他の部分領域の少なくとも1つの領域における、色を含む属性を分析する属性分析手段と、前記顔検出手段が検出した前記顔領域と関連付けられる関連情報を取得する関連情報取得手段と、前記パーツと、前記属性と、前記関連情報とを検索可能に関連付けて蓄積する蓄積手段と、を備えることを特徴とする。
(もっと読む)
文字の形状特徴を使用した文字比較による文書改変検知方法
【課題】文書改変検知方法は、文字を実際に認識することなく、文字の形状特徴を比較することにより、オリジナル画像とターゲット画像を比較する。
【解決手段】文字の境界ボックスが両方の画像について生成され、それぞれの境界ボックスは一つの文字に関する一つ以上の連結されたピクセル群を有する。オリジナル画像およびターゲット画像の境界ボックスは、対応するペアを形成する。一方の画像中にある境界ボックスが、もう一方の画像中に対となる境界ボックスを持たない場合、文書の追加および削除が検知される。境界ボックスの各ペアはその形状特徴を比較するために処理される。形状特徴は、文字のオイラー数と、境界ボックスのアスペクト比と、境界ボックスのピクセル密度と、二つの文字間のハウスドルフ距離とを含む。二つの文字は、形状特徴の比較に基づき、同一の文字または異なる文字と判定される。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】ユーザの操作によって、作業空間における指示対象物に投影されたパターンを取得する画像取得部51と、該画像取得部51により取得された前記パターンから前記指示対象物の位置情報である座標を抽出する位置情報抽出部124とを備え、特定された前記指示対象物の位置情報に基づいた前記指示対象物に対する動作指示に基づいて、前記指示対象物に対する動作を実行する、前記作業空間を自律的に移動する自走式ロボットに用いられる位置特定装置101を採用する。
(もっと読む)
識別器の再学習方法、再学習のためのプログラム、及び画像認識装置
【課題】高精度で多様性を有する画像認識のための識別器の再学習方法を提供する。
【解決手段】ステップS201において、画像データを読み込む。ステップS202において、識別器により、読み込んだ画像に基づいて、画像に関連する言葉や意味等の画像認識を行い第1のクラスを決定する。ステップS203において、第1のクラスに関連、類似又は共起する関連語である第2のクラスを選択又は生成する。ステップS204において、第1のクラスと第2のクラスとを含むGUIに係る画像を、出力装置に出力する。また、前記GUIと入力装置とにより、第1のクラス及び第2のクラスに対するユーザの評価を取得する。ステップS205において、前記ユーザの評価に基づいて、画像に関連する第1のクラスを決定する画像認識方法についての再学習を行う。
(もっと読む)
画像識別子抽出装置
【課題】画像識別子を照合する画像識別子照合装置を提供すること。
【解決手段】画像を識別する情報である画像識別子を照合する照合部を備える。上記画像識別子は、当該画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量が当該次元毎に算出され、次元毎に算出された前記領域特徴量の差分値の絶対値に基づいて、当該差分値が前記画像識別子の各次元の値として量子化されている情報であり、かつ、当該差分値が所定の値より小さい場合には特定の値に量子化されている。照合部は、照合する2つの画像識別子を構成するある次元のそれぞれの値がいずれも上記特定の値の場合に、各次元の値の少なくとも一方が上記特定の値でない場合とは異なる処理を用いて当該2つの画像識別子を照合する。
(もっと読む)
解析対象画像の中から参照画像に基づく物体を認識する画像解析装置、サーバ、プログラム及び方法
【課題】参照画像中に、同一類似の局所特徴量の特徴点が複数存在する場合であっても、解析対象画像の中から参照画像に基づく物体を認識する画像解析装置等を提供する。
【解決手段】画像解析装置は、解析対象画像から多数の特徴点を抽出し、その中で類似した局所特徴量を持つ特徴点の空間的な分布を解析し、その分布密度に基づいた認識対象物体のおおまかな位置を推定する。そして、当該位置推定によって得られた領域の周辺領域において参照用画像とのマッチングを再度実行し、認識対象物体を特定する。その結果得られる参照画像に基づく物体の識別情報と、解析対象画像における当該物体の位置情報とを対応付ける。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
電子機器及びグループ化方法
【課題】本発明によれば、オブジェクトを簡便にグループ化する。
【解決手段】電子機器1は、撮像画像内のオブジェクトの時間的又は空間的な変化のパターンを表すリズム情報を取得する取得部10と、取得部10によって取得された各オブジェクトのリズム情報の類似度を算出する算出部20と、算出部20によって算出された各オブジェクトのリズム情報の類似度に基づいて、各オブジェクトをグループ化するグループ化情報を生成するグループ化部30とを備える。
(もっと読む)
辞書作成方法及び識別用辞書を記憶する記憶媒体
【課題】紙葉類のクラスを効率的に推定し、かつ、媒体変動にロバストなパターン識別が可能となる辞書作成方法及び識別用辞書を記憶する記憶媒体を提供する。
【解決手段】一実施形態に係る辞書作成方法は、識別すべき複数種類の基準となる紙葉類の画像を入力し、前記入力した画像を所定の複数の領域に分割し、前記紙葉類の種類毎に、前記分割した各領域毎の相違度を算出し、前記算出した相違度に基づいて、各領域毎に重み付けを行い、前記重み付けされた複数の領域のうち、重みの大きい順に予め設定される数の領域を選択し、前記選択した領域と、前記入力した画像とを辞書として登録する。
(もっと読む)
パターン認識装置、パターン認識方法
【課題】相互部分空間法を用いた競合学習により、パターン認識性能を向上できるパターン認識装置、パターン認識方法を提供する。
【解決手段】パターン認識装置は、辞書記憶部、認識部、辞書更新部を備える。前記辞書記憶部には認識対象の本来のパターンのカテゴリと各カテゴリ毎に特徴ベクトル空間の部分空間とを対応付けて記憶したパターン認識用の辞書が記憶されている。前記認識部は前記入力パターンの部分空間と前記辞書内の部分空間とのなす正準角から前記入力パターンのカテゴリを特定する。前記辞書更新部はパターン認識時に互いのカテゴリが一致したか否かに応じて類似度を増減させ、前記入力部分空間のベクトルのうち、前記辞書内の部分空間と正準角をなすベクトルに、前記辞書内の部分空間を近づけまたは遠ざけるように新たな部分空間を計算し、求めた部分空間で前記辞書内の部分空間を更新する。
(もっと読む)
オブジェクト追跡装置、方法、及びプログラム
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
類似度評価装置及び方法並びに類似度評価プログラム及びその記憶媒体
【課題】模範映像と評価対象映像とで対応する局所時間における個別動作ごとの類似度を自動で評価する。
【解決手段】所与の模範映像の動作を時系列上の所与の箇所で区切った模範個別動作の各々に対応する、評価対象映像の動作を時系列上で区切った評価対象個別動作の各々を求め、両個別動作ごとの類似度を評価する類似度評価装置1を、各々の映像から動作特徴量時系列を抽出する動作特徴量抽出部2と、動作特徴量時系列の両者における時系列上の変動に基づいて要素同士の対応関係を決定し、該対応関係を用いることで所与の箇所に対応して区切られる評価対象動作の各々の区間を求めて、時系列順に模範個別動作の各区間と評価対象動作の各区間を対応づけるマッチング部3と、マッチング部にて対応付けられた区間同士の比較によって前記類似度を求める類似度算出部4とを備えて提供する。
(もっと読む)
パターンマッチング装置、及びコンピュータープログラム
【課題】本発明は、複数層を含むパターン画像のように、異種の特徴を持つ複数の領域が含まれる画像に対するパターンマッチングを高精度に行うパターンマッチング装置等の提供を目的とする。
【解決手段】上記目的を達成するために本発明では、設計データ、或いは撮像画像に基づいて形成されたテンプレートを用いて、対象画像上でパターンマッチングを実行するパターンマッチング装置であって、異なる複数の対象パターンを含む第1のテンプレートを用いて、第1の対象画像に対するパターンマッチングを実行し、第1の対象画像から、特定パターンを含む領域の情報を除外して第2の対象画像を作成し、当該第2の対象画像と、前記特定パターン以外のパターン情報を含む第2のテンプレートとの間の類似度判定を行うパターンマッチング装置を提案する。
(もっと読む)
画像検査装置
【課題】画像マッチングのパラメータの設定を支援する。
【解決手段】画像探索部122は、検査画像自体をその一部に含んで形成される自己画像と検査画像を比較することにより、複数の圧縮率それぞれについて自己画像と検査画像の画像類似度の分布を示す類似度マップ(自己類似度マップ)を生成する。圧縮率特定部126は、自己類似度マップから画像類似度の標準偏差を求め、検証幅Hを特定する。開始特定部128は検証幅Hが0.5以上となるときの圧縮率を開始圧縮率、1.5以上となるときの圧縮率を復元圧縮率として特定する。画像探索部122は、開始圧縮率以下の圧縮率にて圧縮された対象画像から画像マッチングを開始する。また、復元圧縮率以下の圧縮率であることを条件として、対象類似度マップの画像類似度を離散値から連続値に変換するための対象復元関数を利用する。
(もっと読む)
121 - 140 / 1,366
[ Back to top ]