
Fターム[5L096JA03]の内容
Fターム[5L096JA03]の下位に属するFターム
複合類似度、混合類似度 (26)
内積(COS) (27)
一致画素数 (13)
不一致画素数 (11)
Fターム[5L096JA03]に分類される特許
141 - 160 / 1,366
パターンマッチング装置、及びコンピュータープログラム
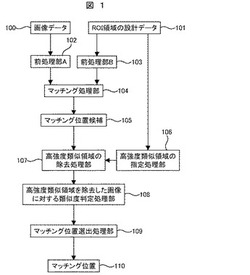
【課題】本発明は、複数層を含むパターン画像のように、異種の特徴を持つ複数の領域が含まれる画像に対するパターンマッチングを高精度に行うパターンマッチング装置等の提供を目的とする。
【解決手段】上記目的を達成するために本発明では、設計データ、或いは撮像画像に基づいて形成されたテンプレートを用いて、対象画像上でパターンマッチングを実行するパターンマッチング装置であって、異なる複数の対象パターンを含む第1のテンプレートを用いて、第1の対象画像に対するパターンマッチングを実行し、第1の対象画像から、特定パターンを含む領域の情報を除外して第2の対象画像を作成し、当該第2の対象画像と、前記特定パターン以外のパターン情報を含む第2のテンプレートとの間の類似度判定を行うパターンマッチング装置を提案する。
(もっと読む)
日照変化領域検出装置および移動物体検出装置

【課題】日照変化領域を検出し、誤検出を排除した正確な移動物体検出を行う。
【解決手段】共通動画画像Hを2組の検出ユニット610,620に与えて移動物体検出を行う。各検出ユニット610,620は、入力された1フレームごとの原画像を背景画像と比較し、両者の類似度が所定の類似判定基準に満たないと判定された非類似領域を移動物体の領域M1,M2として検出する。ユニット620の判定基準はユニット610の判定基準よりも緩く設定する。検出ユニット730は共通動画画像Hから日照変化に起因した変動が生じている日照変化領域を検出し、算出ユニット720は日照変化領域の全領域に対する割合を示す日照変化率ρを算出する。選択ユニット710はρがしきい値以下の場合はユニット610の検出結果M1を、しきい値を超える場合はユニット620の検出結果M2を、最終的な移動物体検出結果Mとして出力する。
(もっと読む)
画像認識プログラム、方法及び装置
【課題】ユーザにとって最適な画像認識を可能とする。
【解決手段】識別部102は、入力された画像データのクラス認識処理を行う。認識結果出力部103は、画像データと認識結果を表示装置105に表示させる。認識結果修正部104は、入力装置106から入力されるユーザによる認識結果の評価に基づき、入力画像データの認識結果を修正し、識別部102に転送する。識別部102は、転送された修正認識結果と入力画像データから学習データを設定し、追加学習を行う。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
撮像装置および撮像方法
【課題】時系列の画像フレーム中の物体の追尾について、安定な追尾結果を得て、追尾の成功率を高める。
【解決手段】画像入力する画像入力手段と、入力した時系列の画像フレームから初期追尾対象領域の指定を受け付ける指定手段と、画像フレーム内で対象とする領域における所定の特徴量を抽出する特徴量抽出手段と、初期追尾対象領域のサイズを変化させて、該変化させた領域から抽出された特徴量が追尾を成功させる所定の条件を満たす領域を新たな初期追尾対象領域として探索する第1の探索手段と、時系列の次の画像フレームにおいて、新たな初期追尾対象領域に類似する領域を追尾結果領域として探索する第2の探索手段とを備える。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
物体識別システムおよび方法、並びに、特徴点位置抽出システムおよび方法
【課題】物体にタグを装着することなく、複数視点からのカメラ画像を対象にしつつカメラの視点方向に依存しない物体識別を行う。
【解決手段】物体識別システム1は、複数視点から物体(照合用物体、対象物体)を撮影した画像データから物体の複数の特徴点を抽出する特徴点抽出部22と、複数の特徴点から幾何学的不変量が算出可能な特徴点を選択する特徴点選択部23と、選択された特徴点の位置から幾何学的不変量を算出する幾何学的不変量算出部24と、照合用物体についての幾何学的不変量と対象物体についての幾何学的不変量とを照合することで対象物体を識別する識別部26と、を備える。
(もっと読む)
姿勢状態推定装置および姿勢状態推定方法
【課題】関節を有する物体の姿勢状態を高精度に推定することができる姿勢状態推定装置を提供すること。
【解決手段】姿勢状態推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢状態の推定を行う装置であって、画像データから、部位の部位候補の抽出を行う部位候補抽出部140と、部位候補抽出部140により部位候補が抽出されなかった未抽出部位の一部が、部位候補抽出部140により部位候補が抽出された既抽出部位の陰になっているものと推定して、画像データから未抽出部位の部位候補の抽出を行う補完部位候補抽出部160と、抽出された部位候補に基づいて、物体の姿勢状態の推定を行う姿勢状態推定部170とを有する。
(もっと読む)
データの領域分割装置、データの領域分割方法およびデータの領域分割プログラム
【課題】完全に連結していない境界を持つ画像に対しても適切に領域を分割することができるデータの領域分割装置を提供する。
【解決手段】隣接行列が定義できるデータ、指定されたクラスタ数およびパラメータが入力される入力部101と、前記入力データの隣接関係から推移行列を計算する推移行列計算部102と、前記推移行列からランダムウォーク特徴量を計算するランダムウォーク特徴量計算部103と、前記ランダムウォーク特徴量からデータ間の類似度を計算する類似度計算部104と、前記データ間の類似度から初期クラスタを生成する初期クラスタ生成部105と、前記初期クラスタを前記指定されたクラスタ数に統合するクラスタ統合部106とを備え、前記入力データを前記クラスタ数およびパラメータによってクラスタリングする。
(もっと読む)
映像表示装置および映像表示方法
【課題】入力映像が3次元映像を表示するための映像であるか否かをより適切に判定して、入力映像を表示する映像表示装置を提供する。
【解決手段】映像表示装置は、入力映像を取得する入力映像取得部11と、類似度を算出する類似度算出部12と、入力映像が、3次元映像として表示するための第1映像であるか、2次元映像として表示するための第2映像であるか、または、第1映像および第2映像のいずれであるかが不明な第3映像であるかを判定する第1判定部13と、第1判定部13で得られた複数の判定結果に依存させて、入力映像が第1映像および第2映像のいずれであるかを判定する第2判定部14と、入力映像の表示を切り替える表示部15とを備える。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
物体認識処理装置及び物体認識処理方法
【課題】バーコードラベルや無線タグが付されていない商品を画像認識処理により短時間で精度良く認識できるようにする。
【解決手段】撮像部10より撮像された認識対象物のカラー画像信号について、認識処理部20において、第1の認識処理部22により、上記カラー画像信号からHSV色空間に変換して、H(色相)情報とS(彩度)情報のカラーヒストグラムを作成し、上記認識対象物の第1の特徴情報として、予め作成されている基準のカラーヒストグラムと比較することにより上記認識対象物を認識し、また、第2の認識処理部23により、上記カラー画像信号に含まれる認識対象物の輝度情報からSIFT特徴量を抽出し、K−means法によるクラスタリングに対応したクラスを横軸としたヒストグラムを作成し、上記認識対象物の第2の特徴情報として、予め作成されている基準のヒストグラムと比較することにより上記認識対象物を認識する。
(もっと読む)
特徴量取得装置、類似画像検索装置、特徴量取得方法およびプログラム。
【課題】画像特徴量を抽出した学習用の画像に比べて、類似画像検索の対象である画像内の物体の位置がずれている場合であっても、その位置ずれによる類似画像検索の精度の低減を軽減すること。
【解決手段】画像データに基づき、画像上において特徴量を算出するために画像を区分する単位領域として、同心円の複数の扇状形状の領域を決定する領域決定部と、前記画像データの画素値の平均を前記単位領域毎に算出することにより、入力画像の特徴量を算出する特徴量算出部と、を備えることを特徴とする。
(もっと読む)
異常事態の検出システム
【課題】予め異常事態が起こりうると予想できる場合に限られることなく、異常事態の可能性の指標として顕著性を算出することができ、あるいは、異常事態の可能性が高い時点と場所の候補を検出することができる異常事態の検出方法を提供する。
【解決手段】各時空点に対応する値をもつ時空間データを入力する入力部と、所定の多数の時空点において時空間データの特徴を表すベクトルを抽出する特徴抽出部と、抽出されたベクトルの特徴の統計量を算出する特徴解析部と、特徴抽出部の結果と特徴解析部の結果に基づいて所定の多数の時空点における顕著性を算出する顕著性算出部を備える。
(もっと読む)
カラー動画像動き推定方法及びカラー動画像動き推定装置
【課題】 カラー動画像動き推定方法及びカラー動画像動き推定装置を提供すること。
【解決手段】本発明のカラー動画像動き推定装置は、入来するカラー動画像に対して、基準フレームの既存色プレーンを基準画像とし、前記基準フレームと隔離した基準フレームと同一色プレーンを持つ参照フレームの色プレーンを参照画像として仮動きベクトルを求める動き推定器(6)と、基準フレームと異なる色プレーンを持つ目的フレームと、前記参照フレームと、前記基準フレームの距離関係に応じて前記仮動きベクトルをスケーリングし、修正動きベクトルを得るベクトルスケーラ(8,10)と、基準フレームの既存色プレーンを基準画像とし、目的フレームの色プレーンを参照画像として、修正動きベクトルを中心にその周辺部に対して動きベクトルの再探索を行い、目的フレームの動きベクトルを得る動き再探索器(7,9)とを備えている。
(もっと読む)
異常検知装置
【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
画像認識装置
【課題】撮像画像中の円形標識をより精度良く認識することを可能にする画像認識装置を提供する。
【解決手段】標識検出処理部によって、車両の前方を撮像した撮像画像から円を検出するとともに、検出した円の内接四角形の内部領域、および内接四角形と外接四角形との間の所定領域のうちの少なくともいずれかの領域に相当する撮像画像の色相、彩度、明度の比率をもとに、特に赤色の比率や無彩色の比率をもとに速度規制標識を精度良く、処理の負荷を低減し、認識する。
(もっと読む)
画像処理装置、画像分類プログラム、及び、画像表示プログラム
【課題】ユーザが希望の撮影画像を探しにくい。
【解決手段】画像処理装置は、時間的に連続に撮影された複数の撮影画像と撮影画像との間の撮影画像の非類似度を算出する非類似度算出部と、前記非類似度の閾値が複数個設定されており、前記複数の閾値に対応して前記複数の撮影画像を複数の群に分類する画像分類部とを備える。前記非類似度算出部は、一の撮影画像と、時間的に前記一の撮影画像の1つ前の撮影画像とから前記非類似度を算出する。
(もっと読む)
追尾装置およびその制御方法
【課題】追尾対象の特徴をもとに追尾を行う際に、誤追尾の発生を高精度に検出可能な追尾装置および方法を提供する。
【解決手段】動画像において追尾対象の位置を追尾する追尾装置は、現在の処理対象のフレーム画像に対して前記追尾対象の特徴情報を用いた被写体の追尾処理を実行することにより、今回の追尾対象位置を検出し、当該処理対象のフレーム画像から今回の追尾対象位置と前回の追尾対象位置との間にある画像を抽出し、抽出された画像と特徴情報との類似度に基づいて検出された追尾対象位置が追尾対象外であるか否かを判定する。追尾装置は、検出された追尾対象位置が追尾対象外でないと判定された場合には、上記今回の追尾対象位置を、上記判定で使用される前回の追尾対象位置として保持する。
(もっと読む)
画像検索装置、画像検索方法及びプログラム
【課題】類似画像検索の結果として出力する画像の選出精度を向上させること。
【解決手段】
クエリ画像及び検索対象画像内から抽出した複数の部分画像の各々を複数のクラスタの何れかに分類することで、各画像から抽出した部分画像の各クラスタへの分類数に基づく特徴ベクトルを生成する特徴ベクトル生成部20及びインデクシング部70と、クエリ画像の特徴ベクトルと、複数の検索対象画像の特徴ベクトルとの類似度を算出し、該類似度に基づいて該検索対象画像をランキングするランキング部30と、クエリ画像の部分画像を分類したクラスタを基準クラスタとして、該基準クラスタの全ての数に対して検索対象画像の部分画像を共通に分類した基準クラスタの数の割合を算出する共通分類度算出部40と、前記ランキングされた検索対象画像の上位から、割合が所定値以上の検索対象画像を出力対象として選出する検索結果選出部50と、を備える画像検索装置。
(もっと読む)
141 - 160 / 1,366
[ Back to top ]