
国際特許分類[A01B63/02]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具を昇降する,あるいは位置を調整する装置またはそのための配置 (864) | トラクタに装着された作業機のためのもの (696)
国際特許分類[A01B63/02]の下位に属する分類
手動装置;機械的蓄積力,例.バネ,を有する手動装置 (7)
トラクタ原動機によって機械的に操作されるもの (4)
トラクタの動作によって操作されるもの (21)
水圧あるいは気圧によって操作されるもの (611)
電動機によって操作されるもの (14)
国際特許分類[A01B63/02]に分類される特許
11 - 20 / 39
農作業機の無線操作システム
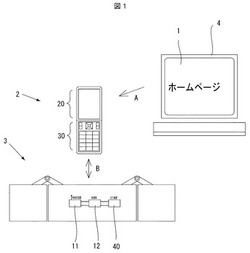
【課題】トラクタに装着して農作業を行う作業機が有する出力機器を携帯電話により操作可能な農作業機の無線操作システムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、作業機3は、作業機3のための出力機器40と、携帯電話2からの無線操作信号を受信する受信部11と、受信した操作信号に基づき出力機器40を制御する制御部12とを有し、携帯電話2は、携帯電話2が有するボタン30により出力機器40の操作が可能であり、ボタン30による操作方法は、作業機3の機種に合わせて変更可能であることにより上記課題を解決する。
(もっと読む)
農作業機用リモコン操作システム

【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
農作業機
【課題】圃場の辺に沿って前進作業ができ、圃場の端から端まで直進作業が可能な農作業機を提供する。
【解決手段】農作業機の一例である溝掘機1は、走行機体の後部に装着される装着部と、これに取り付けられて左右方向に移動可能な平行リンク機構をなすオフセット機構部と、この後端側に取り付けられて所定方向に維持されて溝掘り作業を行う作業部50を有する。作業部50は、オフセット機構部の後端部から下方へ延びる支持軸25に取り付けられたフランジ部51に回転自在に取り付けられた溝掘り体60を有し、溝掘り体60は螺旋刃体62を備えた回転軸61と、この上部に取り付けられた跳ね出し板63を有する。跳ね出し板63はカバー部53によって覆われ、カバー部53には掘削された土壌の排出方向を変更可能にする排出方向変更機構66が設けられている。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
無線受信制御装置
【課題】走行機体に搭乗した作業者が操作する無線指令装置からの指令信号を確実に受信し、装置内部への水の浸入を防止可能な無線受信制御装置を提供する。
【解決手段】走行機体の後部に装着される耕耘作業機1に設けられ、耕耘作業機1に搭乗した作業者が操作する無線指令装置から送信される無線方式の指令信号を受信しこの信号に応じて耕耘作業機1の作動を制御する無線受信制御装置70であり、耕耘作業機1に設けられた取付板71と、内部に形成された収容凹部の開口部が取付板71に面して塞がれた状態で取付板71に設けられた制御ボックス82と、収容凹部内に収容され、無線指令装置からの指令信号を受信するアンテナが基板上に形成された電子基板100を備え、制御ボックス82は、耕耘作業機1の作業姿勢時において、電子基板100が耕耘作業機1に搭乗した作業者側を向いて取付板71に設けられる。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1に各制御手段210,213,281,282を組み付けた後に、個別の制御プログラムをそれぞれ対象となる制御手段210,213,281,282に書き込む場合において、適式な制御プログラムを各制御手段210,213,281,282に伝送できるようにする。
【解決手段】通信バス280に接続された外部端末290にて、識別子毎のプログラムを、識別子に対応した制御手段210,213,281,282にインストールするように構成されており、外部端末280と各制御プログラムとに保安用の固有コードを有する。インストール前に予め、外部端末280の固有コードと各制御プログラムの固有コードとを照合し、合致した制御プログラムを、これに対応する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
作業車
【課題】作業車において旋回する場合に旋回終了位置を適切に検出し、作業装置が適切に作業状態に操作されるように構成する。
【解決手段】機体の走行距離Gと、操向操作自在な車輪1の直進位置からの操向角度とにより、作業行程からの旋回開始L01に基づいて、旋回開始前の機体の進行方向+Y,−Yでの旋回中の機体の位置を検出する。旋回開始位置E1の検出に基づいて、アクチュエータを作業装置5の非作業状態側に作動させ、旋回終了位置E3の検出に基づいて、アクチュエータを作業装置5の作業状態側に作動させる。アクチュエータの作業装置5の作業状態側への作動開始時期を変更可能に構成する。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの各種設定操作の繁雑さを解消する。
【解決手段】走行ポジション(P1)では、前記車体の走行形態を「二駆」状態とし、且つ作業機昇降制御を切に設定し、耕耘ポジション(P4)では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定すると共に、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具(9)を設け、前記設定器(9)を前記耕耘ポジション(P4)に操作すると、該設定具(9)により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とするように構成し、かつ前記走行ポジション(P1)に切り替えたときの前記作業機昇降制御を切に維持した状態で「四駆」を設定可能に設けた。
(もっと読む)
農作業機
【課題】本発明は、上記課題に鑑みて、トラクタに装着され、トラクタの基本情報及びトラクタの状態情報に基いて適切に制御可能な動作部を有する農作業機を提供することを目的とする。
【解決手段】制御部3は、あらかじめ記憶部に記憶されたトラクタに関する情報であるトラクタ基本情報101に基づき計算される基本動作パターンをトラクタから取得したトラクタ状態情報102により修正して実動作パターンを計算し、実動作パターンに基づいて、検出部8からの情報により動作部で目的の動作をさせるためにアクチュエータ7の稼動を制御することで上記課題を解決する。
(もっと読む)
作業車輌
【課題】複数のコントローラを、それぞれの制御対象となる操作手段又は作動手段に近接して配置した作業車輌を提供する。
【解決手段】トラクタは、主変速操作スイッチを備えた副変速レバーの下方側に、変速を制御する変速コントロールユニットC2を有し、サイドスイッチパネル18の下方部分に、作業機の昇降を制御する昇降コントロールユニットC3を有し、表示パネル15の裏側に、走行情報及び作業情報を表示する表示パネル15を制御する表示コントロールユニットC4を有し、表示パネル15の機体前方側に備えられ、これらコントロールユニットに通信回線によって接続されると共に操作レバー・スイッチや各種センサ等からの入力情報に基づいて指令信号を発する操作コントロールユニットC1を有して構成されている。これにより、各コントロールユニットと操作手段及び作動手段とを近接して配置することができる。
(もっと読む)
11 - 20 / 39
[ Back to top ]