
国際特許分類[A61B17/16]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992) | 砕骨器;骨用ドリルまたはノミ;円鋸 (280)
国際特許分類[A61B17/16]の下位に属する分類
ドリル用案内具
国際特許分類[A61B17/16]に分類される特許
31 - 40 / 280
医療用インプラント摘出装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
関節鏡視下切除装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
手術器具および手術器具システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
靭帯再建術の際に利用するための装置及び方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
ドリルビット
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
遠隔操作型アクチュエータ

【課題】 細長形状のガイド部の先端に設けられて作業具を支持する先端部材の姿勢を遠隔操作で精度良く変更することができ、製品ごとに異なる先端部材の初期位置姿勢に応じた姿勢変更制御を行える遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に設けた作業具1と備える。ガイド部3内の姿勢操作部材31を姿勢変更用駆動源43で進退動作することにより、先端部材2を姿勢変更させる。姿勢変更用駆動源43を姿勢制御装置62で制御する。先端部材2をガイド部3に対して真っ直ぐになるように拘束する拘束具6を設ける。姿勢制御装置62で用いる先端部材2の初期位置姿勢における姿勢操作部材31の進退位置の情報は、拘束具6で先端部材2を拘束し、姿勢操作部材31により先端部材2に予圧を付与した状態で進退検出手段45により検出した値とする。
(もっと読む)
肩置換術用器具
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
関節インプラント及び人工関節並びに方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
骨髄内視鏡検査のための実装システム
本発明の1つの態様によれば、骨髄内視鏡検査で用いられる器具のための実装システム(40)が提供される。実装システム(40)は、骨(10)に機械的に固定されるように構成された配置システム(41)と、配置システム(41)に固定された少なくとも1つの器具ホルダ(45)とを備える。器具ホルダ(45)は、髄管内での骨形成術の際に用いられる1つまたはそれ以上の器具を保持するように構成されている。配置システム(41)は骨(10)に機械的に固定され、器具ホルダ(45)は配置システム(41)に固定される器具を保持するので、外科医は、両手を使って患者に対する手術を行うことができる。 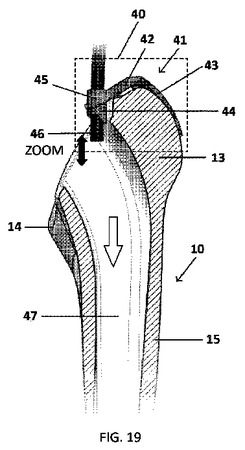 (もっと読む)
(もっと読む)
熱パッドを有するハンドヘルド医療デバイス
ハンドヘルドデバイスは、ハウジングと、モータと、モータとハウジングとの間の空間に配置された熱伝導パッドとを備える。モータによって生成された熱は、熱パッドによってハウジングまたはモータの長さにわたって全体に延在する内部流体通路へと伝達される。いくつかの実施形態では、熱パッドは、ハウジングの温度を業界ガイドラインに従って維持するように構成されている。 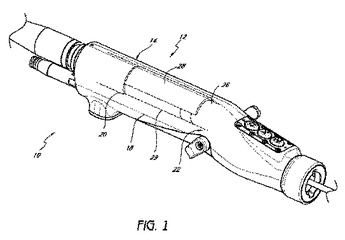 (もっと読む)
(もっと読む)
31 - 40 / 280
[ Back to top ]