
国際特許分類[A63H18/16]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 玩具のためのハイウエイまたは軌道;乗物と軌道間の特殊な相互作用によって走行するもの (104) | 乗物と軌道間の相互作用による乗物の操縦制御;乗物による軌道素子の制御 (19)
国際特許分類[A63H18/16]に分類される特許
1 - 10 / 19
動作玩具
【課題】動作制御を行うためのパターンを玩具のデザイン性を損なうことなく自然に配置するとともに、移動体の移動速度に応じて動作制御を変化させ、バリエーション豊かな動作を楽しむことのできる動作玩具を提供する。
【解決手段】経路上に、形象物パターン又は光センサ206のうちの一方が設けられ、自動車模型20に、形象物パターン又は光センサ206のうちの他方が設けられており、制御装置210は、光センサ206によって検知された外部刺激から形象物パターンを検出し、この形象物パターンと光センサ206が外部刺激を検知した速度とに応じて、自動車模型20、又は経路若しくはその近傍に設けられた構造物のうちの少なくともいずれか1つの動作を制御する。
(もっと読む)
遠隔操作される玩具車両
走行路上を走行する、遠隔操作される玩具車両(1)は、駆動モーターと、操縦可能な車輪とを備えている。現実のカーレースをよりよくシミュレートできるように、遠隔操作される玩具車両(1)は、走行路の特性を認識するためのセンサー部(4)と、この認識された走行路の特性に応じて、玩具車両(1)の特性を調整するための制御部とを備えている。 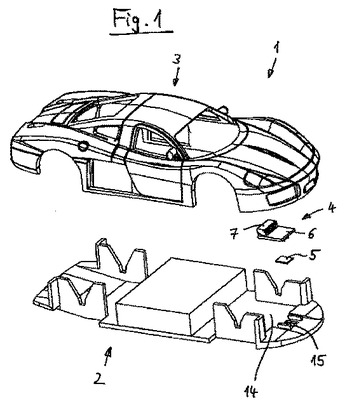 (もっと読む)
(もっと読む)
姿勢制御付き無人二輪車

【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
移動体玩具
【課題】 同じ読取情報であっても読み取る方向によって異なる制御をすることができる移動体玩具を提供する。
【解決手段】 データ列から構成される移動途上に設けられた光学読取情報によって動作が制御される移動体玩具の走行環境決定プログラムであって、コンピュータを、移動体玩具の走行中に走査される前記光学読取情報を入力させる手段と、入力された光学読取情報におけるデータ列の読み取り順を検知する手段と、検知した読み取りデータ列順に基づいて前記光学読取情報に関連付けて記憶された当該データ列順に対応する走行環境情報を抽出する手段と、抽出した走行環境情報により移動体玩具の動作を制御する手段として機能させる。
(もっと読む)
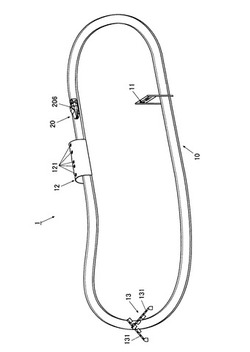
コースパーツ、及び移動玩具システム。
【課題】移動玩具が移動の際にコースに設定されたデータを適切に読み取れるようにする。
【解決手段】移動玩具10が移動する走行面CPB1〜CPB16を有するコース60を構成するコースパーツCP1〜CP16であって、コースの走行面又は壁面63L、63R、64L、64Rの第1の領域CPBR1には、移動玩具がデータを読み取るための複数のデータマーカDM1〜DMnが設けられ、走行面又は壁面の第2の領域CPBL1には、データをサンプリングするためのクロックを移動玩具が読み取るための複数のクロックマーカCM1〜CM16が設けられる。このとき、複数のデータマーカは、第1の領域において、第1の方向D1に沿って設けられ、第1の方向に対して垂直方向を第2の方向D2とした場合に、複数のクロックマーカは、第1の領域の第2の方向に設けられた第2の領域において、第1の方向に沿って設けられる。
(もっと読む)
移動玩具、プログラム、情報記憶媒体、およびゲーム装置。
【課題】移動玩具のデータ用センサでコースデータ等のデータを適正に読み取る。
【解決手段】コース60上を移動する移動玩具10であって、ボディ12と、ボディに搭載され、所与の動力が供給されて移動玩具を移動させる原動機30と、移動玩具がデータを読み取るためにコースに設けられる複数のデータマーカDM1〜DMnを検知するデータ用センサ50aと、データをサンプリングするためのクロックを読み取るためにコースに設けられる複数のクロックマーカCM1〜CM16を検知するクロック用センサ50bと、クロック用センサの検知信号から抽出されたクロックにより、データ用センサの検知信号をサンプリングすることでデータを抽出する制御部310と、を含む。
(もっと読む)
走路盤
【課題】レース途中で走行環境を変化させることができる走路盤を提供すること。
【解決手段】走行路に対して進退可能で進退位置によって玩具車両の通過を妨害する障害物と、障害物を走行路に対して進退させ当該障害物の進退位置を変更するためのモータと、モータを作動させるためのモータ駆動回路と、路面の一部を構成し、玩具車両が通過する際に当該玩具車両の重さによって下方に押圧される踏板と、モータ駆動回路に設けられ、常態でOFFであり踏板が下方へ押圧されている間ONされて当該モータ駆動回路を作動させる第1のスイッチと、を備えることを特徴とする。
(もっと読む)
走路盤
【課題】車線を増やして車両玩具を振り分けるとともに車両玩具を円滑に走行させる。
【解決手段】車線Sから分岐した分岐車線Sa~Sdを有する走路盤1は、車線分岐点Bに進入した車両玩具Cを分岐車線Sa~Sdに振り分ける振分機構部7と、分岐車線Sa,Sbのゲート部Gを通過する車両玩具Cを走行,停止させるストッパ40とを備える。振分機構部7は、分岐車線Sa,Sbの渋滞を検知する渋滞検知スイッチ70と、渋滞が検知された場合に、検知されていない分岐車線Sa~Sdに車両玩具Cを振り分ける振分制御部71とを有する。
(もっと読む)
走行玩具システム
【課題】 市販の模造玩具に改造を施すことなく、トラック部材上を被牽引体に支持した状態で走行させることができる走行玩具システムを提供する。
【解決手段】 自走牽引車5に牽引されてトラック部材3の表面3Cを走行する被牽引体7を備えている。被牽引体7は、改造が施されていない市販の模造玩具ITと部分的に係合する複数の係合部41A乃至41Dを有して市販の模造玩具を支持するアタッチメント43を備えている。アタッチメント43は、市販の模造玩具の寸法に応じて複数の係合部41A乃至41Dの位置関係を変更し得るように構成されている。
(もっと読む)
走行路の一部に設置された磁石により走行制御される電動走行玩具
【課題】走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において走行体へ与える指示を簡単な電気的方法で遠隔操作可能とする。
【解決手段】走行体2に搭載した電動モーター6によって車輪5を駆動して走行路1を自走する走行玩具2において、走行体2には走行路1上の一部に設置された磁石3を検出するための磁気センサ4と、上記磁気センサ4からの信号を受け取って走行用モーター6の回転を制御するための制御装置を搭載し、磁気センサ4が走行路1上の磁石3を検出すると、上記制御装置は、磁石3の配置パターンに応じて上記走行体2の走行する方向を逆転させる、または上記走行体2の走行速度を上げる、または上記走行体2の走行速度を下げる、または上記走行体2を停止させるように走行用モーター6の制御を行う。
(もっと読む)
1 - 10 / 19
[ Back to top ]