
国際特許分類[A63H3/33]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 人形 (737) | 人形内の発声手段の装置;音を出すための人形内の手段 (120) | 人形に特に適合したその他の発生手段 (104)
国際特許分類[A63H3/33]に分類される特許
61 - 70 / 104
アンドロイド制御システム
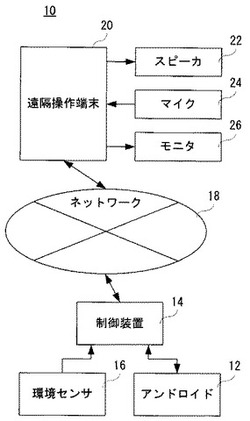
【課題】自然な動作を実行する擬似人間ロボットを提供すること。
【解決手段】アンドロイド制御システム10はアンドロイド12を含み、アンドロイド12は人間の代役として或る場所に配置される。通常、アンドロイド12は、制御装置14の制御に従って、人間との間で対話するなどのコミュニケーションを図る。ただし、アンドロイド12自身が対応できない場合には、その旨を遠隔オペレータに通知する。かかる場合には、遠隔オペレータの指示に従って、アンドロイド12は動作される。また、アンドロイド12は、たとえば、その近傍や周囲に人間が存在しない場合や遠隔オペレータからの指示がない場合には、制御装置14の制御に従って無意識動作を実行する。つまり、瞬きや呼吸のような生理的な動作をしたり、髪を触るなどの癖による動作をしたりする。
【効果】 無意識動作のようなアンドロイド特有の動作を実現できる。
(もっと読む)
コミュニケーションロボット

【構成】 コミュニケーションロボット10はアンテナ58を含み、RFIDタグ12、14および16から送信されるかつRFIDの情報を重畳した電波を受信する。ユーザA、BおよびCは、それぞれ、タグ12,14および16を所持または装着している。したがって、ロボット10は、RFIDの情報を取得して、その近傍或いは周囲に存在するユーザA、BおよびCを認識する。また、ロボット10は、RFIDの情報を取得した際の電波強度から最近傍に存在するユーザを特定し、当該ユーザに対してコミュニケーション行動を取る。
【効果】 近傍或いは周囲に存在するユーザを個別に認識することができ、特定したユーザに適したコミュニケーション行動を取ることができる。
(もっと読む)
音楽について相互作用するデバイス
音楽について相互作用するデバイスを備えたシステムが提供される。第1のデバイスは、第1の識別コード、第1の無線通信インタフェース及び第1のオーディオプレーヤを有し、第2のデバイスは、第2の識別コード、第2の無線通信インタフェース及び第2のオーディオプレーヤを有する。第1のデバイス及び第2のデバイスは相互作用シーケンスに参加するように構成される。相互作用シーケンスにおいて、第1のデバイスは第1の無線通信インタフェースを使用して無線通信し、第2のデバイスは第2の無線通信インタフェースを使用して無線通信し、楽曲は第1の識別コード及び第2の識別コードの双方に基づいて選択され、第1のデバイス及び第2のデバイスは、各々が楽曲の異なるパートを演奏しつつ楽曲を協働して演奏する。 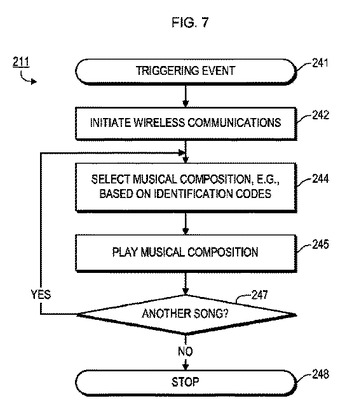 (もっと読む)
(もっと読む)
生活リズム人形
【課題】患者が受け入れることのできる、生活リズムを保つ指示を行う、生活リズム人形の提供。
【解決手段】人形の中に、電源2と、時計を内蔵したコンピュータ3と、音声録音用のマイクロフォン4と、録音再生装置5およびスピーカー6とを内蔵させ、両方の手のひらに操作スイッチ9を設け、人形の会話によって1日の生活のリズムが指示されることにより患者はそれを受け入れることができるようにした生活リズム人形。
(もっと読む)
生活リズム人形
【課題】患者が受け入れることのできる、生活リズムを保つ指示を行う、生活リズム人形の提供。
【解決手段】人形の中に、電源2と、時計を内蔵したコンピュータ3と、音声録音用のマイクロフォン4と、録音再生装置5およびスピーカー6とを内蔵させ、両方の手のひらに操作スイッチ9を設け、人形の会話によって1日の生活のリズムが指示されることにより患者はそれを受け入れることができるようにした生活リズム人形。
(もっと読む)
ロボット、音声変更方法及び音声変更プログラム
【課題】ユーザから提示される物体を視覚で認識して言葉を覚えるロボットを提供する。
【解決手段】ロボットはまず、ある対象を想定してそれを示すランダムな音声を発する。ユーザはそれに対して物体を提示し、提示された物体が想定した対象であるならば、ロボットは歓喜の声をあげ、ユーザはその物体が望みの物体であることを知る。次に、ロボットは、同じ言葉を発するが、その言葉がユーザが対象としてふさわしくない場合は物体を提示しない。するとロボットは別の言葉を発し、ユーザが言葉が希望する言葉に近づいたと判断した場合に物体を提示する。これを繰り返すことで、望みの言葉に近づける。そして最終的に2回連続する同じ言葉に対して物体を提示することで言葉を確定させる。
(もっと読む)
発音玩具
【課題】 歌唱や伴奏に合わせて動き、カラオケも楽しめる人形を提供することで、飽きることのない玩具を提供する。
【解決手段】 駆動機構を有する人形と、前記人形と一体とされる音声合成装置本体とスピーカ、前記音声合成装置本体内部に設置される音声混合回路から構成され、前記音声合成装置本体はスピーカとハンディマイクとが接続可能であり、前記音声混合回路は、マイク端子から入力されたアナログ信号とオーディオ端子から入力されたアナログ信号をミキサー回路により重ね合わせ、メインアンプを通してから人形の足部に設置されたスピーカから拡声するものであり、ドライバにより駆動機構の動力源への電圧の印加を行い、駆動機構により人形を動作させる発音玩具とするものである。
(もっと読む)
コミュニケーションロボット
【課題】効率良く、適切なサービスを提供することができるロボット制御システムを提供する。
【解決手段】コミュニケーションロボット10は、周囲や自身の状況を検出する様々なセンサを含み、センサの出力に基づいて、オペレータ呼出条件を満たすか否かを判断する。コミュニケーションロボット10は、通常、自律制御によって、人間との間でコミュニケーション行動を行うなどして、受付や道案内などのサービスを提供し、オペレータ呼出条件を満たすと判断したときに、ネットワーク202を介して、呼出要求をオペレータ端末204に送信する。これに応じて、オペレータは、オペレータ端末204を操作して、コミュニケーションロボット10に、制御コマンドを送信する。すると、コミュニケーションロボット10は、制御コマンドに従うコミュニケーション行動を実行する。
(もっと読む)
ロボットにおける対話相手識別方法およびロボット
【課題】安価に、かつ信頼性高く、対話相手(人またはロボット)の識別、方向判別を可能とし、対話相手に応じた対話/サービスの提供を可能とすること。
【解決手段】対話ロボット10の身体(例えば胴回り)に、複数方向に向けて配置した赤外線発受信ユニット11を設け、ユーザ(人間)20はユーザの識別信号を発信する赤外線発受信ユニット21を装着する。ロボット10は、上記赤外線発受信ユニットの、どの受信器によって相手からの赤外線が受信されたかによって、対応する相手が自分からみてどちら方向にいるかを知り、また、受信した識別信号を解読することによって、対応する相手が誰かを知る。そして、ロボット10は、その顔部(頭部)あるいは身体の向きを検出されたユーザ方向に向け、識別した相手に応じた対話/サービス内容を選択し、上記相手に対して言語・非言語に基づく対話/サービスを行う。
(もっと読む)
脚式移動ロボットの制御装置
【課題】会社などの来訪者に合わせた案内動作を十分に実現して来訪者とのコミュニケーションを高めるようにした脚式移動ロボットの制御装置を提供する。
【解決手段】ロボットの移動環境において所定距離内に来訪者(案内相手)が存在するか否か識別し(S12)、来訪者が識別されたとき(S14)、脚部アクチュエータなどの動作を制御し、移動環境において識別された来訪者を目的地まで地図に従って案内する(S16からS44)。
(もっと読む)
61 - 70 / 104
[ Back to top ]