
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
101 - 110 / 483
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
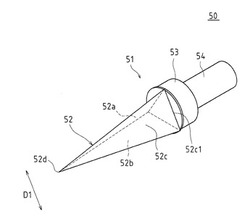
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
動作入力装置

【課題】 イネーブルスイッチを操作しながら、他の入力操作を行うことができる動作入力装置の提供
【解決手段】 ティーチング装置1は、把持部11及び操作部13を有している。使用者は、ティーチング装置1を使用する際に、把持部11を掌及び第二指〜第五指を用いて把持する。操作部13は、把持部11を使用者が把持したときの第二指側に、把持部11に続いて配置されている。把持部11は、イネーブルスイッチ111を有している。使用者は、第二指〜第五指を用いてイネーブルスイッチ111を操作する。入力部131は、操作部13において把持部11が配置されている側とは反対側に位置する面P13に配置されている。これにより、把持部11を掌及び第二指〜第五指で把持しながら、入力部131への第一指による操作が可能となる。なお、入力部131は、タッチパッド133、液晶ディスプレイ135及び表示制御部137により構成されている。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
可動電極による溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワークの表面位置の検出に要する時間を長くすることなく、可動電極による溶接ワークの表面位置の検出精度を向上させる。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガン14のうちの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、多関節ロボット12を用いて溶接ワークWとスポット溶接ガン14とを相対移動させることにより、可動電極30と溶接ワークWとを互いに離れた状態から接近させながら又は可動電極30と溶接ワークWとを互いに接触した状態から離反させながら、サーボモータ34の電流又はトルクを監視し、電流又はトルクの変化傾向が変化したときの可動電極30の位置と多関節ロボット12の位置とから溶接ワークWの表面位置を検出する。
(もっと読む)
干渉チェック方法、干渉チェック装置、及び干渉チェックプログラム
【課題】三次元物体同士の干渉の有無の評価と併せて、両者の隙間距離や最近傍位置の評価を高速に処理する。
【解決手段】干渉チェック装置10は、仮想空間をメッシュ分割して小さな領域に細分化する空間細分化部11、メッシュの各頂点と基準物体オブジェクトの表面までの最短距離と方向を算出して各メッシュ頂点に付随する情報として登録することで基準物体オブジェクトまでの最短距離マップを作成する最短距離マップ作成部12、移動物体オブジェクト上に基準物体オブジェクトまでの最短距離を評価するための評価点を設定する最短距離評価点設定部13、最短距離評価点の座標値に基づいて最短距離マップを参照することで基準物体オブジェクトまでの最短距離を取得する干渉チェック部14を備える。
(もっと読む)
ロボットのツールの位置の微調整方法及びロボット制御システム
【課題】
教示位置の微調整時の操作手順が減るため、教示時間を低減させることが可能であり、回転操作手段の操作のみで予め定められた動作座標系の予め定められた進行方向の座標軸に沿って移動させることができ、位置の微調整時の教示を楽に行うことができるロボットのツールの位置の微調整方法及びロボット制御システムを提供する。
【解決手段】
回転操作部材13をエンターキー11aにより溶接トーチTの位置の微調整操作手段として割付する。回転操作部材13が操作された際、回転操作部材13の回転量及び回転方向をロータリエンコーダ14に検出させて、回転量及び回転方向をコントローラ20に通知する。コントローラ20のCPU21が、回転量の単位毎に予め定めた寸動量で、かつ、回転方向と対応して、予め定められたツール座標系のZ軸に沿って、ロボットRを動作制御し、溶接トーチTの位置の微調整を行う。
(もっと読む)
ロボット制御システム
【課題】
操作者がコントローラに設けられた第1接続確認操作手段を操作すると、コントローラの第1表示手段と、可搬式操作部に設けられた第2表示手段が同時に第1接続確認操作手段が操作される前の第1表示状態から第2表示状態に変化するため、操作者が把持している乾式操作部とコントローラの接続関係の誤認識を確実に防止できるロボット制御システムを提供する。
【解決手段】
コントローラ20AとTP10と通信接続が完了した後、コントローラ20Aが教示モードに設定されている際に、操作者がコントローラ20Aに設けられた運転準備ボタン58aを押すと、運転準備ボタン58aの運転準備ボタン表示灯63と、TP10の非常停止ボタン表示灯141aが同時に消灯から点滅パターンに変わるので、操作者が把持しているTP10とコントローラ20Aの接続関係の誤認識を確実に防止できる。
(もっと読む)
経路計画生成装置および該方法ならびにロボット制御装置およびロボットシステム
【課題】本発明は、コミュニケーションにより生じた動作の遷移をスムーズに行う経路計画を生成し得る経路計画生成装置、該方法、ロボット制御装置およびロボットシステムを提供する。
【解決手段】本発明の経路計画作成部22は、複数のモーションデータを記憶するモーションデータ記憶部31と、動作の遷移の必要が生じた場合に、各モーションデータについて実行中の一の動作での所定の第1姿勢と他の動作での所定の第2姿勢との距離を求める距離演算部32と、第1閾値以下の前記距離を与える他の動作のモーションデータを選択する遷移先選択部33と、第1姿勢までのデータと第2姿勢以降のデータとを連結して新たな経路計画のデータを生成する経路計画部34とを備え、経路計画部34は、第1および第2姿勢間の距離が第1閾値以下でこの第1閾値よりも小さい第2閾値以上である場合に第1および第2姿勢間の経路のデータを確率的ロードマップ法で生成する。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
101 - 110 / 483
[ Back to top ]