
国際特許分類[B60L7/24]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 車両用電気的制動方式一般 (1,009) | 付加的に機械的または電磁的制動を行なうもの (368)
国際特許分類[B60L7/24]の下位に属する分類
制動効果の制御 (7)
国際特許分類[B60L7/24]に分類される特許
41 - 50 / 361
自動車
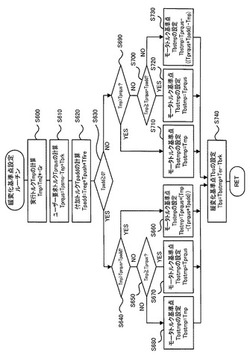
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
電気自動車の制御装置

【課題】モータと変速機を備えた電気自動車において、クラッチを不要にして構成を簡易にすると共に、重量やコストの増加を抑制するようにした電気自動車の制御装置を提供する。
【解決手段】少なくとも運転者に操作されるアクセルペダルの開度に応じて車両に搭載されるモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機と、車両を制動可能な機械的なブレーキの動作を制御するブレーキ制御手段とを備えた電気自動車の制御装置において、モータ出力制御手段は、モータを回生させている間に変速指示がなされたとき(S10,S12,S18)、噛み合い式クラッチが複数個の変速段ギヤを切り替える前にモータの出力を零あるいはその近傍からなる所定値に制御すると共に(S22)、ブレーキ制御手段にブレーキを作動させる(S20)。
(もっと読む)
車両用駆動装置の制御装置
【課題】蓄電装置が満充電状態になった場合においても、摩擦係合装置を係合させて内燃機関を回転させることなしに、車両の制動を精度良く行うことができる制御装置の実現。
【解決手段】摩擦係合装置を介して内燃機関に連結される入力部材と、車輪に連結される出力部材と、変速機構と、回転電機と、を備えた車両用駆動装置の制御装置であって、内燃機関の回転が停止し、摩擦係合装置の解放状態で、車両の制動要求があった場合に、制動トルク制御の実行を判定する制動トルク制御実行判定部と、要求制動トルクを設定する制動トルク設定部と、蓄電装置の充電量が充電制限判定値以上であるかを判定する充電状態判定部と、制動トルク制御を実行し、充電量が充電制限判定値以上であると判定された場合に、伝達トルクが要求制動トルクとなるように、内燃機関を回転させない範囲内で伝達トルク容量及び変速比を制御するトルク制御部と、を備える制御装置。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
車両用制動装置
【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
電気自動車
【課題】アクセルオフに伴って車両に制動力を付与するときに、バッテリが所定蓄電割合を超えて充電される状態が継続するのを抑制する。
【解決手段】アクセルオフに伴って車両に制動力を付与するとき、蓄電割合SOCが所定割合SOCref以上となると共に蓄電割合SOCの時間変化率kが値0を超えているときには(S100)、要求トルクTr*からモータ駆動トルクTmref(正の値)を減じたものをブレーキトルクTb*に設定して、設定したブレーキトルクTb*(制動力)が電気自動車に付与されるように油圧ブレーキ装置を制御し(S110)、その後、トルク指令Tm*にモータ駆動トルクTmrefを設定すると共に設定したトルク指令Tm*でモータが駆動するようインバータやバッテリの電圧を昇圧する昇圧コンバータを制御する(S120)。
(もっと読む)
41 - 50 / 361
[ Back to top ]