
国際特許分類[B60L7/24]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 車両用電気的制動方式一般 (1,009) | 付加的に機械的または電磁的制動を行なうもの (368)
国際特許分類[B60L7/24]の下位に属する分類
制動効果の制御 (7)
国際特許分類[B60L7/24]に分類される特許
81 - 90 / 361
車両の制動制御装置
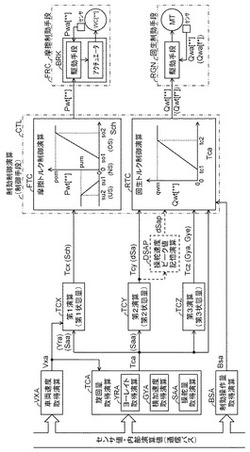
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
ハイブリッド車両

【課題】 電動機の回生制動のみで制動を行なっている場合に、蓄電池の蓄電量が上限に達した場合でも、当該車両の制動力の減少を抑制するハイブリッド車両を提供する。
【解決手段】 蓄電池BATTの蓄電量が所定の値以上になったときに、要求制動力から、第1クラッチC1を接続状態にすることで発生するエンジンENGの回転による制動力とメカブレーキBRKによる制動力とを減じた制動力を、モータMGの回生で発生させる。
(もっと読む)
電磁ブレーキの制御装置および同装置を搭載した荷役車両
【課題】車両停止時、電磁ブレーキの作動回数が減ることにより、電磁ブレーキの作動音による運転者の不快感を低減できると共に、車両発進時、スムーズな発進感覚を提供できる電磁ブレーキの制御装置の提供。
【解決手段】荷役車両に搭載され、ブレーキペダルを踏み込むと制動状態より解放される電磁ブレーキの制御装置であって、その制動条件を、車両速度が発生している時における第1の制動条件と、発生していない時における第2の制動条件とからなるものとし、第1の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両速度が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとし、さらに、第2の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両動作量が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとする。
(もっと読む)
自動車
【課題】液圧ブレーキ装置の液圧調整用のバルブの作動回数が耐久性を考慮した作動回数を超えた以降に、車両の他の部品に比して液圧ブレーキ装置におけるバルブの破損だけが早期に生じるのを抑制しつつ、車両の燃費の悪化を抑制する。
【解決手段】バルブ作動回数Nvに応じてカウントダウンすると共に設定距離Lsetを走行する毎にカウントアップするカウンタCを計算し(S110〜S170)、カウンタCが値0以上のときには運転者のブレーキ操作に対してブレーキ協調制御を実行し(S190)、カウンタCが値0未満のときには運転者のブレーキ操作に対してブレーキ協調制御は実行せずに油圧ブレーキ制御を実行する(S200)。これにより、バルブの作動頻度を少なくし、車両の他の部品に比してバルブの破損だけが早期に生じるのを抑制すると共に車両の燃費の悪化を抑制することができる。
(もっと読む)
回生制動制御装置
【課題】エンジンブレーキ相当の制動力を適切に制御することで、回生効率を向上させることが可能な回生制動制御装置を提供する。
【解決手段】回生制動制御装置は、制動時において、回生制動力を発生可能に構成された回転電機を有する車両に好適に適用される。制御手段は、少なくとも回生制動力を用いて、アクセルがオフにされた際にエンジンブレーキ相当の制動力(エンジンブレーキ相当制動力)を発生させる制御を行う。具体的には、制御手段は、アクセルオフ時に発生させるエンジンブレーキ相当制動力を、車速が低いほど、当該車速が高い場合よりも大きくする制御を行う。これにより、回生による減速エネルギー回収量を増加させることができる。よって、回生効率を向上させることができ、燃費を向上させることが可能となる。
(もっと読む)
複合ブレーキの協調制御装置
【課題】制動初期における摩擦制動の応答遅れを補う回生制動が中止された場合でも、違和感を伴う減速度の急変を生じないようにする。
【解決手段】マスターシリンダ圧が発生させ始める瞬時t1より、目標制動トルクtTtotalはブレーキペダルの踏み込み応じて図示のごとくに立ち上がる。瞬時t1より、マスターシリンダ圧が設定値以上になる瞬時t2までの間、目標制動トルクtTtotalを発生可能最大回生制動トルクで賄い得てtTm=tTtotalにすべきところながら、目標回生制動トルクtTmに対し、制限された早期回生制動トルクを設定すると共に、不足分を補う目標摩擦制動トルクtTbとにより目標制動トルクtTtotalを実現する。この制限された早期回生制動トルクは、回生制動を中止せざるを得なくなって回生制動トルクが早期回生制動トルクから一気に0になった場合でも、車両の減速度が運転者に違和感を与えることのない値とする。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、従動輪の摩擦トルクがばらついても、総制動トルクのばらつきを低減。
【解決手段】ブレーキ操作に基づく総制動トルク指令Ftotal*に対し、左右前輪の回生ブレーキによる回生トルク指令Fm*と、左右前輪および左右後輪の各摩擦ブレーキによる摩擦トルク指令Fb*を演算する回生/摩擦トルク演算部B1と、左右前輪および左右後輪の各摩擦ブレーキで実行される摩擦トルク値である摩擦トルク実行値Fbを推定演算する摩擦トルク実行値演算部B2と、摩擦トルク指令Fb*と摩擦トルク実行値Fbの偏差を、左右前輪および左右後輪の各輪分について算出し、これらの偏差を足し合わせた摩擦トルク総偏差を、回生トルク指令Fm*に加える回生トルク補正値Fm_addとして出力する回生トルク補正値/摩擦トルク補正値演算部B5と、を備えた。
(もっと読む)
回生制動トルクの制御装置
【課題】主駆動輪および従駆動輪の回転速度の条件に依存せず、回生制動時に所望の配分比で主駆動輪および従駆動輪に回生制動トルクを配分することができる回生制動トルクの制御装置を提供する。
【解決手段】ハイブリッドECU100は、主駆動輪である後輪5の回転速度Nrが従駆動輪である前輪4の回転速度Nf以上のとき後輪5のみに回生制動トルクを付与して後輪5の回転速度Nrが前輪4の回転速度Nf未満となる補正回生制動トルクTr0を取得し、要求回生制動トルクT0および補正回生制動トルクTr0に基づいて(1−2a)T0≧Tr0を満たす最大の従駆動輪配分比aを求め、電子制御カップリング30は、前輪4に回生制動トルクaT0を制御カップリングトルクTCとして付与し、後輪5に回生制動トルク(T0−TC)を付与する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、連続回生による二次バッテリの過電圧を防止する最大限域の回生量を確保できる電動車両の制御装置を提供する。
【解決手段】駆動モータと、二次バッテリと、目標制動トルクに対し回生協調トルクでの不足分を摩擦制動トルクにより補う回生協調制御手段と、ブレーキ操作に基づきドライバ要求回生トルクTDを演算する演算手段(ステップS31)と、二次バッテリの状態に基づきバッテリ回生可能連続時間定格電力PBを演算する演算手段(ステップS35)と、バッテリ回生可能連続時間定格電力PBとモータ回転数に基づきバッテリ回生可能連続時間定格トルクTBを演算する演算手段(ステップS36)と、所定時間間隔毎に、ドライバ要求回生トルクTDと、バッテリ回生可能連続時間定格トルクTBと、のセレクトローにより回生協調トルクTRBを調停演算する回生協調トルク調停演算手段(ステップS38)と、を備えた。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、回生トルクと液圧制動トルクが付与される回生制動輪の制動トルク配分が過多になるのを抑え、車両挙動の安定化を図ることができる電動車両の制御装置を提供すること。
【解決手段】上流圧制御タイプの液圧ブレーキユニットと、左右前輪30,31に対して回生トルクを与える回生ブレーキユニットと、制動操作時に目標制動トルクTQを算出する目標制動トルク算出手段(図3のステップS1)と、回生協調制御による制動時、左右前輪30,31の制動トルク配分が、左右前輪30,31にロック傾向が発生する制動トルク配分よりも小さくなるように決定した回生トルク値を、回生許可トルクRBとする回生許可トルク決定手段(図3のステップS2〜ステップS11)と、目標制動トルクTQに対して回生許可トルクRBで不足する分を、摩擦ブレーキトルクFBで補う制御を行う回生協調制御手段(図3のステップS12〜ステップS14)と、を備えた。
(もっと読む)
81 - 90 / 361
[ Back to top ]