
国際特許分類[B60R21/0134]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052) | 交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777) | 衝突,差し迫った衝突,又は横転を検知するための手段を含むもの (164) | 障害物との差し迫った接触に応答するもの (50)
国際特許分類[B60R21/0134]に分類される特許
1 - 10 / 50
乗員拘束機構
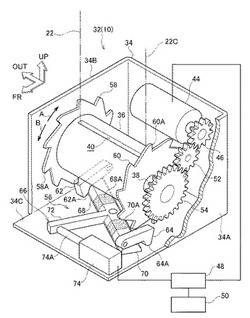
【課題】ベルト部の腰装着部による乗員の腰部の拘束方向を変更する。
【解決手段】乗員拘束機構10では、車両の衝突が予知された際に、モータ44の正転駆動により巻取軸36が正方向に回転されて、ウェビング22が巻取軸36に車両後側から巻取られることで、ウェビング22のラップベルト部が車両後側に引張られて、乗員の腰部が水平方向において拘束される。一方、車両の転覆が予知された際には、モータ44の逆転駆動により巻取軸36が逆方向に回転されて、ウェビング22が巻取軸36に車両前側から巻取られることで、ウェビング22のラップベルト部が車両下側に引張られて、乗員の腰部が上下方向において拘束される。このため、車両の予知される緊急状態の種類に対応して、乗員の腰部を適切に拘束できる。
(もっと読む)
車両衝突回避及び緩和システム

【課題】複数の車両の間の切迫した衝突によるダメージを共同で低減するためのシステム及び方法の提供。
【解決手段】複数の車両の間の切迫した衝突によるダメージを共同で低減するシステムが、感知装置、プロセッサ、メモリ、出力装置、及び通信装置を有する。感知装置は、複数の車両の近く、周囲、内部、または関連の状況を感知する。メモリは、プロセッサと電気的に通信し、プロセッサにより実行されるプログラミングコードを有する。プログラミングコードは、感知装置によって感知された感知状態を分析し、複数の車両の間の切迫した衝突によるダメージを共同で低減するために命令を複数の車両に共同で決定し出力する様に構成されている。出力装置は、共同で決定された出力命令を複数の車両に出力し、または実行する。通信装置は、感知された状態を感知装置からプロセッサに通信し、共同で決定した出力命令をプロセッサから出力装置に通信する。
(もっと読む)
走行制御装置および車両
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
車両制御装置、車両制御方法及びプログラム
【課題】自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する。
【解決手段】障害物検出部11は、自車両と衝突する可能性がある障害物を検出する。回避可否判定部15は、障害物検出部11によって障害物が検出された場合に、自車両の進行を制御することで障害物との衝突を回避できるか否かを判定する。衝突範囲特定部16は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、障害物における自車両と衝突しうる範囲を特定する。最小被害部位特定部17は、衝突範囲特定部16が特定した範囲のうち、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する。進行制御部18は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、最小被害部位特定部17が特定した部位に変形が及ぶように自車両の進行を制御する。
(もっと読む)
カーテンエアバッグ装置
【課題】車両のロールオーバの際における乗員保護性能を向上させることができるカーテンエアバッグ装置を得る。
【解決手段】カーテンエアバッグ装置10は、ドアオープニング22、24の上縁部に折り畳み状態で収納され側面衝突及び車両のロールオーバの際に展開される前側主チャンバ36Fと、ガス供給を受けることで少なくとも車両のロールオーバの際に展開される前側副チャンバ40とを備えている。前側主チャンバ36Fは、側面視で、後端側がセンタピラー15とオーバラップするようにベルトラインBLの上側で車両前後方向に延びる筒状に展開され、前側副チャンバ40は、前側主チャンバ36Fとは側面視でオーバラップしない前方で、下端がベルトラインBLよりも下方に至るように展開される。
(もっと読む)
車両制御装置
【課題】低コストで構成可能でありながら適切なタイミングで衝突安全装置を動作可能とする車両制御装置を提供する。
【解決手段】自車両と物体との衝突の危険性を低減するべく車両を制御する車両制御装置であって、物体を検出する物体検出手段と、物体と自車両との衝突の危険性が高いか否か判定する衝突判定手段と、衝突判定手段により衝突の危険性が高いと判定された場合、衝突の危険性を低減するための衝突安全装置を作動させる衝突安全装置制御手段と、自車両の車体のピッチ角の経時変化量をピッチ角変化量として算出するピッチ角変化量算出手段と、ピッチ角変化量に基づいて衝突安全装置の動作を抑制または停止する動作抑制手段とを備える、車両制御装置である。
(もっと読む)
車両の運転支援装置
【課題】実際に生じる様々な値の障害物情報の信頼度に対して、その信頼度に適した衝突防止制御を選択して実行することで、きめの細かい自然な感覚の衝突防止制御を行う。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4からの制御対象の各種制御情報に基づいて障害物の検出の信頼度を、例えば、障害物の検出時間に応じて算出する。走行制御ユニット5には、障害物に対する衝突を防止する衝突防止制御として、複数の制御タイプ(例えば、4つの制御タイプ(タイプA、タイプB、タイプC、タイプD))が予め記憶されており、高速走行時には、タイプA、タイプB、タイプCの3種類の制御タイプの中から信頼度に応じて衝突防止制御が選択され、低速走行時には、タイプA、タイプD、タイプCの3種類の制御タイプの中から信頼度に応じて衝突防止制御が選択されて実行される。
(もっと読む)
車両制御装置
【課題】PCS制御が作動した場合において、自車両と当該自車両周囲の物体との衝突を想定した制御を行うことのできる車両制御装置を提供する。
【解決手段】自車両の周囲の物体を検出する物体検出手段と、自車両が右折または左折したか否かを判断する右左折判断手段と、物体検出手段によって検出された物体と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断手段が物体と自車両とが衝突する可能性が高いと判断した場合に第1の制御を行う第1の制御手段と、右左折判断手段によって自車両が右折または左折したと判断され、かつ衝突判断手段によって自車両が右折または左折した先に存在する物体と衝突する可能性が高いと判断された場合には第2の制御を行う第2の制御手段とを備える。
(もっと読む)
車両衝突判定装置
【課題】乗員保護性能の維持とコスト削減を両立可能な車両衝突判定装置を提供する。
【解決手段】車両に生じる音響帯域の高周波振動、及び前記音響帯域より低い帯域の低周波振動を検出する振動検出手段と、前記高周波振動のエネルギ変化量を算出すると共に、前記低周波振動を基に判定用演算値を算出し、前記エネルギ変化量及び前記判定用演算値に基づいて乗員保護装置の起動を必要とする衝突が発生したか否かを判定する衝突判定手段とによって車両衝突判定装置を構成する。
(もっと読む)
車両衝突判定装置
【課題】車両に生じる音響帯域の高周波振動に基づいて衝突判定を行うに当って、衝突判定精度の安定化を実現可能な車両衝突判定装置を提供する。
【解決手段】車両衝突判定装置は、車両に生じる音響帯域の高周波振動を検出する振動検出手段と、前記高周波振動に含まれる第1帯域の振動成分を抽出する第1抽出手段と、前記高周波振動に含まれる第2帯域の振動成分を抽出する第2抽出手段と、前記第1帯域の振動成分のエネルギ変化量を第1エネルギ変化量として算出する第1エネルギ変化量算出手段と、前記第2帯域の振動成分のエネルギ変化量を第2エネルギ変化量として算出する第2エネルギ変化量算出手段と、前記第1エネルギ変化量及び前記第2エネルギ変化量に基づいて乗員保護装置の起動を必要とする衝突が発生したか否かを判定する衝突判定手段とを備える。
(もっと読む)
1 - 10 / 50
[ Back to top ]