
国際特許分類[B60T8/1766]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 車両の減速時の,過度の車輪のスリップの防止に特に適したブレーキ調整,例.ABS (492) | 車両の軸重に応じたブレーキ力の配分,例.車両の前方から後方への配分 (42)
国際特許分類[B60T8/1766]に分類される特許
1 - 10 / 42
制動力制御装置
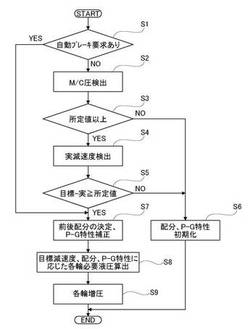
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
車両の制動力制御装置

【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
ブレーキシステム
【課題】 連動ブレーキシステムとABSを採用した自動二輪車において、ブレーキレバーを単独操作して前輪ブレーキに制動力を発生させた状態で前輪ABSが作動したときの減速度を大きくする。
【解決手段】 ブレーキバイワイヤ方式の連動ブレーキシステムにおいて、ブレーキレバーのみから入力したとき前輪ブレーキに制動力を発生させるとともに、後輪ブレーキにも連動した制動力を発生させる。この状態で前輪ABSが作動すると、前輪ブレーキの制動力が一定となり、トータル制動力は.△Frだけ低下する。そこで、後輪側液圧モジュレータ22Rを駆動して、後輪ブレーキの制動力を理想配分特性によって定まるて後輪限界目標圧Prmaxに向けて増大させる。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
制動力制御装置
【課題】悪路走行時においても好適にEBD制御を実施可能とする。
【解決手段】制動力制御装置は、左後輪(WRL)に対応する第1油圧系統及び右後輪(WRR)に対応する第2油圧系統を備える車両の制動力を制御する。制動力制御装置は、各車輪の車輪速度を検出する車輪速度検出手段(83)と、後輪の車輪速度が所定の条件を満たした場合に、前輪及び後輪の動作量の差に基づいて第1及び第2油圧系統を制御することで、左後輪及び右後輪の制動力制御を独立して行う制御手段(110,120)と、車両が悪路を走行していることを検出する悪路検出手段(130)と、車両が悪路を走行していることが検出されており、左右いずれかの後輪の車輪速度が所定の条件を満たしている場合に、左後輪及び右後輪の各々のブレーキ油圧を油圧保持制御するよう制御手段を制御する油圧保持制御手段(140)とを備える。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
1 - 10 / 42
[ Back to top ]