
国際特許分類[B60W40/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 周囲の環境に関するもの (507)
国際特許分類[B60W40/02]の下位に属する分類
国際特許分類[B60W40/02]に分類される特許
1 - 10 / 82
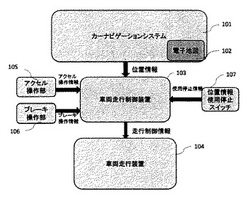
カーナビゲーションシステムを用いる車両走行制御装置
【課題】[0047]
近年、駐車場においてアクセルをブレーキと間違えて踏み、建物に突入したり、人身事故を起こしたりする事例が増えている。障害物を検知し自動停止する装置が自動車に実装されつつあるが、そもそもアクセルをブレーキと間違えて深く踏んでしまう事態には十分に対応できない。
【解決手段】[0048]
本発明によれば、駐車場のように建物の近くか内部にあり、人の往来も多い徐行すべき場所では、カーナビゲーションシステムの情報を用いて自動的に徐行になり、アクセルを過度に踏んでも徐行速度以上にはならず、車両自動停止装置が十分有効に機能することができる。
(もっと読む)
車両の走行制御装置

【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
運転者支援装置、および運転者支援システム
【課題】車両の運転者による運転行動を支援する運転者支援装置において、運転者が車両を報知に従って操作しなかった場合やできなかった場合に対応した適切な報知ができるようにする。
【解決手段】車載装置は、自車両の車両状態または自車両の走行環境を表す車両情報が支援条件を満たしているときに自車両の運転者に対する支援のための報知を行い(S420)、取得した車両情報が支援条件を満たしていないとき、車両情報に応じて支援のための報知が実施されない理由を示す情報を報知する(S340,S370,S530,S570)。したがって、支援のための報知をしないときに、その理由(報知が実施されない理由)を運転者に報知できる。よって、支援のための報知を終了する際や、支援のための報知が実施されると予想される状況において報知が実施されないとき等に、運転者に違和感を覚えさせないようにすることができる。
(もっと読む)
車両用情報処理装置
【課題】ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】運転支援装置10のECU30は、ドライバーの過去の減速操作における減速終了地点の平均値よりも車両の現在位置から遠い地点を車両を減速させるための基準として、交差点等の手前で車両を減速させるための情報処理を行なう。このため、車両を減速させるための基準はドライバーの過去の減速操作における減速終了地点の平均値よりも遠方とされることになる。このため、ドライバーの意図に反して減速終了地点が交差点等の手前となり過ぎて、ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することができる。
(もっと読む)
車両用制御装置
【課題】車両が、想定されていなかった走行場に遭遇したときに、その走行場に対応した新たな制御アルゴリズムを自律的に創発することができる車両用制御装置を提供する。
【解決手段】本発明は、ドライバ状態、車外環境状態及び車両状態を検出する検出部10と、車両が遭遇している走行場を推定する推定部20と、過去の経験に基づく既知の走行場と車両の制御アルゴリズムとを対応付けて記憶した第1記憶部30と、推定走行場が想定内であるか、想定外の走行場であるかを判定する判定部40と、推定走行場が想定外である場合に、推定走行場に対応する制御アルゴリズムを創発する創発部50と、推定走行場が想定内である場合に、第1記憶部30から獲得した推定走行場に対応する制御アルゴリズムを車両の制御パラメータに変換し、推定走行場が想定外の走行場である場合に、創発された制御アルゴリズムを車両の制御パラメータに変換する変換手段60とを有する。
(もっと読む)
端末装置
【課題】ITSを使用することによって、CO2量を低減する技術を提供する。
【解決手段】端末装置14は、エンジンにて駆動される車両に搭載される。取得部72は、本車両の存在位置に関する情報を取得する。取得部72は、少なくともひとつの基地局装置からの信号を受信することによって、少なくともひとつの信号機の設置位置、各信号機の灯色、各信号機の灯色の継続時間に関する情報を取得する。導出部74は、少なくともひとつの信号機の設置位置、各信号機の灯色、各信号機の灯色の継続時間に関する情報と、本車両の存在位置に関する情報とをもとに、車両の走行速度を導出する。
(もっと読む)
車両制駆動制御装置
【課題】上り坂の道路で車両のずり下がりを抑制する技術において、推定路面勾配の誤差によって車両のずり下がりが発生してしまう可能性を低減する。
【解決手段】ずり下がり防止処理実行部46は、上り勾配路において車両の後方へのずり下がりが発生する可能性があると判定するまでは、FF演算部41を制御することで、目標車軸トルクのFF演算分を、走行抵抗に対抗して車両が目標加速度を実現するために必要な車軸トルクの推定値に到達するように算出して出力させ、また、ずり下がりが発生する可能性があると判定した後は、FF演算部41を制御することで、目標車軸トルクのFF演算分を、上記必要な車軸トルクの推定値よりも所定量αTだけ減少させた車軸トルクに到達するように算出して出力させると共に、所定量αTの減少の効果の相殺を防ぐために、FB演算部42における目標車軸トルクのフィードバック演算分の上昇を制限する。
(もっと読む)
走行支援方法、走行支援装置及び走行支援プログラム
【課題】車両における燃料消費量及び二酸化炭素排出量を低減する。
【解決手段】車両検出部が車両の情報を検出(ステップS6)した結果から、情報取得部が、車両が通過する交差点の情報と、交差点に設けられた信号機の設定情報を取得する(ステップS8)。そして、取得された情報と、車両の情報とから、無停止速度算出部が、交差点を青信号で通過するための速度である無停止速度を算出する(ステップS10)とともに、燃料消費量推定部が、車両が現行の速度を維持して走行し、交差点で停止する場合と、無停止速度で走行する場合の燃料消費量を推定する(ステップS16)。更に、推奨速度決定部が、燃料消費量推定部の推定結果に基づいて、現行の速度又は無停止速度のいずれかを推奨速度として決定し(ステップS14,S20)、推奨速度送信部が、推奨速度を車両に対して送信する(ステップS22)。
(もっと読む)
運転者支援装置、および運転者支援システム
【課題】自車両の運転者による運転操作を支援する運転者支援装置および運転者支援システムにおいて、燃費改善や渋滞緩和に貢献することができるようにする。
【解決手段】運転者支援システムにおいて路側機は、特定の信号機についての現在および将来の灯色と各灯色の継続時間とを含む信号機情報を車両に対して送信する。そして、車載装置は、目標速度設定処理にて、路側機から取得した信号機情報、および自車両から信号機が配置された交差点までの距離を表す交差点距離に基づいて、信号機の灯色が青の状態で自車両が交差点に進入可能な走行速度の範囲を表す進入速度範囲を演算する(S200)。そして、進入速度範囲を出力する(S210,S220)。この出力に応じて自車両の走行速度が進入速度範囲内になるように調節すれば、自車両を信号機の灯色が青の状態で交差点に進入させることができる。従って、燃費改善や渋滞緩和に貢献できる。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
1 - 10 / 82
[ Back to top ]