
国際特許分類[B62D65/14]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 自動車またはトレーラーの設計,製造,例.組立て,解体,または構造的な変更で他に分類されないもの (881) | サブユニットまたは部品の,車体,その他のサブユニットまたは部品への組み付け,位置決め (394) | 車両内装部品,例.シート,ライニング,トリム,計器板 (48)
国際特許分類[B62D65/14]に分類される特許
1 - 10 / 48
テープ貼着工具
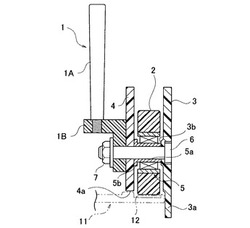
【課題】テープを相手部材の側縁部に沿って容易に貼着できるテープ貼着工具の提供を図る。
【解決手段】把手1Aを把持してテープガイド3の位置決め部3aをドアトリム11の側縁部に当接させて、ドアトリム11の所定位置に貼着した不織布テープ12の貼着始端上にローラ2を押し当てて、テープ貼着方向へ転動させる。これにより、不織布テープ12はテープガイド3,4によってテープ幅方向の遊動が規制されてローラ2とドアトリム11面との間に逐次遊動されると共に、ドアトリム11の側縁部に沿って整然と貼着される。
(もっと読む)
インパネモジュールの車両搭載方法

【課題】インパネモジュールを車室前部に組み付ける作業を容易かつ適正に行い得るようにする。
【解決手段】支持メンバ2の左右両端部に設けられた取付ブラケット6よりも車幅方向内方側部の下面側に形成された位置決め孔部に挿入される上向きのピン部8,9と支持メンバ2の受け座23と車両前後方向に面する被クランプ面部25とを有する搭載治具7を支持メンバ2の左右両側方部に装着する装着工程と、上記搭載治具7の被クランプ面部24を移送手段のクランプ部によりクランプするクランプ工程と、該移送手段により上記インパネモジュールを車室前部に移送して上記取付ブラケット6を車体側壁部に仮預けする仮預け工程と、その後に上記搭載治具を支持メンバから取り外すとともに上記取付ブラケットを締結ボルトにより車体側壁部に対して車幅方向に締結する締結工程とを備えた。
(もっと読む)
成形天井材用接着剤塗布装置
【課題】設置面積を縮小することができる、成形天井材用接着剤塗布装置を提供する。
【解決手段】接着剤塗布ステーション4において、成形天井材2の下端部が保持機構12に保持されるとともに、成形天井材2の他方面2Bが第1支持部材25に支持されることにより、成形天井材2は、他方面2B側に傾倒した姿勢に配置される。そして、その状態で、塗布ロボット3により、成形天井材2の一方面2Aに接着剤が塗布される。その後、保持機構12による成形天井材2の保持が解除されるとともに、第1支持部材25による成形天井材2の支持が解除されると、成形天井材2は、その下端部が接着剤塗布ステーション4に残ったまま、自重により左側にさらに傾倒して、第2支持部材28にもたれ掛かる。その後、押圧部材30により、成形天井材2の下端部が接着剤塗布ステーション4から搬出ステーション5に移動される。
(もっと読む)
自動車の部品組み付け方法及び組み付け部品
【課題】第1部品を第2部品に組み付ける際に、ケーブルを第1部品に対して取付位置のバラツキや位置ズレを生じるとなく仮置きすることができて、両部品の組み付けを容易に行うことができる自動車の部品組み付け方法及び組み付け部品を提供する。
【解決手段】ケーブル23の一端が取着された第1部品21を第2部品38に対して組み付ける部品組み付け方法において、第1ステップでは、ケーブル23の中間部に固定された取付治具24を、第1部品21に設けられた第1取付部33に対して着脱自在に取り付けて、ケーブル23を第1部品21上に仮置きする。第2ステップでは、第1部品21を第2部品38に組み付ける。第3ステップでは、取付治具24を第1取付部33から取り外した後、第2部品38に設けられた第2取付部40に対して取り付けることにより、ケーブル23を第1部品21から延出させて第2部品38上に配置する。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】単純作業はロボットに任せ、人の判断や経験を必要とする作業時のみ、人がロボットを操作して、組立ライン上を移動する作業対象物にワークを組付けることができるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア4a内で移動可能なロボット16と、ハンドのワーク把持装置近傍に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】ボディ14の取付ブラケット110は側面に開口するインパネ取付孔111a、111bを備える。インストルメントパネル24は、ボルト150がインパネ取付孔111a、111bを介して挿通される側方固定孔25a、25b及び把持穴26を備える。インストルメントパネルの取付装置10は、インパネ支持アーム72と、インパネ支持アーム72の側面に設けられた基準ターゲット77と、側方から撮像する撮影部100とを有し、画像データ144からインパネ取付孔111a、111b及び基準ターゲット77の位置を、位置データ142における基準位置データと比較し、その比較結果に基づいて、基準ターゲット77が許容ずれ範囲となるようにインパネ支持アーム72を駆動する。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】ワークの組み付けにかかるコストを低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ20Aをサイドエアバッグ組付部12Aに組み付ける。このワーク組付方法は、そして、まず、ハンド50のピン部材55をピン挿通孔231に挿通して、ハンド50に対するサイドエアバッグ20Aの相関位置を位置決めし、次に、このハンド50でサイドエアバッグ20Aを保持して、サイドエアバッグ組付部12Aに移動し、挿通したピン部材55の先端部分をサイドエアバッグ組付部12Aのピン挿入穴101に挿入して、サイドエアバッグ20Aをサイドエアバッグ組付部12Aに位置決めし、次に、締付装置60A、60Bにより、ねじ61をサイドエアバッグ20Aのねじ挿通孔232に挿通して、サイドエアバッグ組付部12Aのねじ螺合部102に締め付ける。
(もっと読む)
1 - 10 / 48
[ Back to top ]