
国際特許分類[B62K3/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自転車;自転車のフレーム;自転車操向装置;特に自転車用に適した乗手操作の制御装置;車軸懸架装置;サイドカー,前方に連結する車体,その他これに類するもの (4,474) | 二輪車 (384)
国際特許分類[B62K3/00]の下位に属する分類
フレーム (24)
二人乗用自転車 (4)
特に身体障害者用に適合するもの (5)
国際特許分類[B62K3/00]に分類される特許
101 - 110 / 351
走行装置及びその制御方法
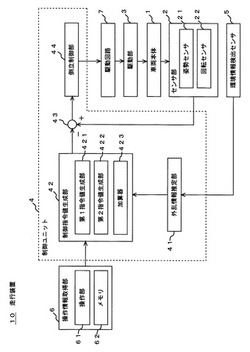
【課題】より安定的な走行制御を行うことができる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、周辺の走行環境情報を検出する環境情報検出手段5と、搭乗者により行われた走行操作情報を取得する操作情報取得手段6と、環境情報検出手段6により検出された走行環境情報に基づいて、所定時間後までに生じる外乱情報を推定する外乱情報推定手段41と、操作情報取得手段6により取得された走行操作情報と、外乱情報推定手段41により推定された外乱情報に基づいて、制御指令値を生成する制御指令値生成手段42と、制御指令値生成手段42により生成された制御指令値に基づいて、車輪の駆動を制御して倒立制御を行う倒立制御手段44と、を備えている。
(もっと読む)
同軸二輪車

【課題】非常停止時でも搭乗者の安全が確保できる同軸二輪車を提供する。
【解決手段】電源制御回路620は、制御系電源生成部621と、パワー系電源生成部622と、非常停止スイッチ手段と、を備える。
制御系電源生成部621は、センサ部、制御装置およびモータドライバ322、322の制御系回路を動作させる制御系電源を生成する。パワー系電源生成部622は、モータドライバ322、322に供給され、モータ321、321の駆動動力生成に用いられるパワー系電源を生成する。
非常停止スイッチ手段623は、非常停止時に作動して、モータドライバ322、322とパワー系電源生成部622とを接続するパワー系電源ライン625のみを遮断する。
(もっと読む)
走行装置及びその制御方法
【課題】より安定的な走行を行うことができる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、接地部材が路面に接地した接地状態を検出する接地検出手段と、車輪の駆動を制御して倒立制御を行う制御手段と、を備えている。接地検出手段により接地部材の接地状態が検出されたとき、制御手段は、倒立制御を停止する。また、制動検出手段により制動開始が検出され、かつ、接地検出手段により接地部材の接地状態が検出されたとき、制御手段は、倒立制御を停止してもよい。
(もっと読む)
車両
【課題】接地状態と、倒立状態との間の遷移時に、揺動制限手段による制動を解除することにより、簡素なシステムでありながら、乗降時に搭乗部を水平な状態に保持することができ、快適な乗降が可能で、小型、軽量、かつ、安価なようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪と、車体に揺動可能に取り付けられた搭乗部と、該搭乗部の揺動を可能又は不能にする揺動制限手段とを有し、接地状態、及び、倒立状態においては揺動制限手段によって搭乗部の揺動を不能にし、接地状態及び倒立状態の間の遷移状態においては揺動制限手段によって搭乗部の揺動を可能にする。
(もっと読む)
同軸二輪車
【課題】安価な構成で、車体の前方領域の障害物を良好に検出することができる同軸二輪車を提供する。
【解決手段】本発明の同軸二輪車1は、車体10の一部を成す平行リンク機構110の左右方向への回転により旋回を実現する同軸二輪車である。同軸二輪車1は、車体10の前方領域の障害物を検出する検出部80と、車体10の旋回方向へ検出部80を回転させる回転機構90と、を備える。これにより、検出エリア角度の狭いセンサを用いて、安価な構成で、車体の前方領域の障害物を良好に検出することができる。
(もっと読む)
車両
【課題】一方の駆動輪への駆動トルクの付与が不可能であるときに、車両重心位置移動手段によって車両の重心位置を他方の駆動輪の方向へ移動させることにより、例えば、駆動モータが故障したときのように、片方の駆動輪への駆動トルクの付与が不可能になったときでも、旋回走行状態を制御でき、安全な場所まで容易に走行させることができる安全で便利な車両を提供できるようにする。
【解決手段】回転可能に車体に取り付けられた左右の駆動輪12と、車両重心位置を左右に移動させる車両重心位置移動手段と、前記駆動輪12の各々に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、一方の駆動輪12への駆動トルクの付与が不可能である場合、前記車両重心位置移動手段を制御して車両重心位置を他方の駆動輪12の方へ移動させる。
(もっと読む)
車両
【課題】能動重量部を固定した場合に車両加速度及び車両減速度の制限値を減少させることによって、能動重量部が中立位置から大きく外れた位置で固定されたときであっても、可能な限りの運動性能を確保することができるとともに、十分な安全性を保障することができ、使い勝手がよく、かつ、安全で快適に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、前記車体に対して移動可能に取り付けられた能動重量部と、該能動重量部を車体に対して固定する能動重量部ブレーキと、前記駆動輪12に与える駆動トルク及び前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記能動重量部を車体に対して固定した場合に、車両加速度及び車両減速度の制限値を能動重量部を車体に対して固定する直前の車両加速度及び車両減速度より減少させる。
(もっと読む)
車両
【課題】倒立制御停止直後から所定時間、駆動トルクを付加して車体を特定方向に傾斜させることによって、緊急停止時を含む倒立制御停止時に、確実に車体を特定方向に傾斜させることができ、車体固定式のストッパを車体の片側のみに取り付けるだけでよく、車両を軽量・小型化することができ、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に与える駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢制御の停止直後から所定時間、前記駆動輪12に駆動トルクを付加し、前記車体を特定方向に傾斜させる。
(もっと読む)
車両
【課題】ブレーキを解除した場合に能動重量部が移動する方向を予測する移動方向予測手段が目標位置に近付く方向への移動を予測したときにはブレーキを解除することによって、能動重量部が中立位置から大きく外れた位置で停止して固定された場合であっても、車体の姿勢が適切な状態に自動的に復帰するようにして、車体傾斜によって乗員に与える不快感や不安感、及び、操縦性の低下が解消され、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】車両制御装置は、能動重量部ブレーキを解除した際の能動重量部の移動方向を予測する移動方向予測手段を備え、能動重量部が目標位置に近付く方向へ移動することを移動方向予測手段が予測した場合に能動重量部ブレーキを解除する。
(もっと読む)
車両
【課題】倒立制御停止直後から所定時間、能動重量部に推力を付加して移動させ、その重心移動により車体を特定方向に傾斜させることによって、緊急停止時を含む倒立制御停止時に、確実に車体を特定方向に傾斜させることができ、車体固定式のストッパを車体の片側のみに取り付けるだけでよく、車両を軽量・小型化することができ、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、前記車体に対して移動可能に取り付けられた能動重量部と、前記駆動輪12に与える駆動トルク及び前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢制御の停止直後から所定時間、前記能動重量部に推力を付加して前記能動重量部を車体に対して移動させ、前記車体を特定方向に傾斜させる。
(もっと読む)
101 - 110 / 351
[ Back to top ]