
国際特許分類[B64C13/18]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 飛行操縦翼面,揚力増加フラップ,空気制動装置,またはスポイラを作動するための操縦系統または伝達系統 (300) | 入力装置 (189) | 自動的に作動されるもの,例.突風検出器に応答するもの (170) | 自動操縦装置を使用するもの (65)
国際特許分類[B64C13/18]に分類される特許
11 - 20 / 65
方位角推定装置、方法及びプログラム
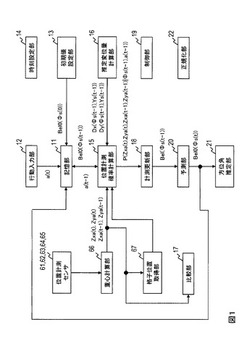
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
ビークル位置保持システム

【課題】ビークルの位置を保持するためのシステムおよび方法を提供する。
【解決手段】システムは、第1のビークルの位置の誤差を示すトラッキング位置誤差を考慮しての、第2のビークルを参照した航跡状態に基づいてのガイダンス補正を決定して、第2のビークルに対する第1のビークルの位置を維持することにより、ビークルの混雑を低減させる。ガイダンス補正は、第1のビークルと少なくとも第2のビークルとの間の望まれる間隔を維持する。
(もっと読む)
到着時刻制御を使用する垂直航法の方法及びシステム
【課題】ビークル速度を制御する制御システムを提供する。
【解決手段】システム100は、中間地点の要求到着時刻(RTA)を受信するように構成された入力装置114と、入力装置に通信可能に接続され、RTA誤差が到着予定時刻(ETA)とRTAとの差を示し且つ速度制御許容差は指定されたRTAに関する要求時間正確度を示すとき、RTA誤差及びRTA許容差を使用してオートスロットル制御の動的調整可能範囲を自動的に判定するようにプログラムされたプロセッサ104と、プロセッサに通信可能に接続され、推力制御信号及び抗力制御信号のうち少なくとも一方をビークル速度制御システムへ送信するように構成された出力装置とを含む。
(もっと読む)
ホバリング可能な航空機のための電子飛行制御システム
少なくとも1つの回転翼(102、104)を備えるホバリング可能な航空機(100)のための電子飛行制御システム(1)が提供される。飛行制御システム(1)は、飛行制御システム(1)がパイロットからの直接指令に応答して回転翼速度を制御する手動飛行制御モードと、飛行制御システム(1)が飛行条件に基づいて自動的に回転翼速度を制御する、航空機のそれぞれの飛行モードに対応する少なくとも2つの自動飛行制御モードとにおいて動作するように構成されている。また、飛行制御システム(1)は、自動飛行制御モードの各々について、少なくとも1つの飛行量の異なる値に回転翼の異なる速度値を関連付けるそれぞれの飛行表を記憶し、それぞれの飛行表に基づいて自動飛行制御モードにおいて回転翼速度を自動的に制御するように構成されている。  (もっと読む)
(もっと読む)
固定翼機、固定翼機システムおよび固定翼機の着陸方法
【課題】無人固定翼機は、着陸進入点を通過後、滑空着陸のフェーズに移行するが、追い風の影響で飛行計画上の着陸点を著しく超過してしまう問題がある。
【解決手段】推定着陸点が設定した着陸点を超過すると算出した場合、再度着陸進入を実施する。実施の際には着陸進入点を超過分、着陸点から離れる方向に移動させ、追い風にも対応する。また、再進入の挙動を規定することで、狭い空域での着陸を実現する。さらに着陸点に直進的に進入する為の通過判定条件を持たせた着陸進入点への進入の際には、着陸進入点と着陸点を結んだ線が接線となる円の円周上に沿って飛行することで直進的な進入を実現する。
(もっと読む)
慣性航法装置、飛翔体及び航法データ算出方法
【課題】飛翔体の打ち上げ時におけるアライメントを省略もしくは短縮でき、低廉な慣性計測器を使用できる慣性航法装置、飛翔体及び航法データ算出方法を提供する。
【解決手段】本発明の慣性航法装置Aは、慣性計測器11の計測結果から飛翔体の飛行に用いる航法データを算出する慣性航法装置であって、飛翔体の飛行に関する情報を受信して比較用航法データを算出する受信機12と、受信した比較用航法データを参照して航法データの誤差量を推定する誤差推定部14と、飛翔体の慣性飛行中に誤差量を用いて航法データを補正する航法演算部13と、を有するという構成を採用する。
(もっと読む)
Tilt翼機構による垂直離発着無人航空機
【課題】固定翼航空機は高い水平飛行能力を持つが、滑走路を必要とし運用に制限がある。ヘリコプタは、運用自由度は高いが、巡航性能が固定翼航空機に劣る。両者の利点の両立を簡便な機構で達成する。
【解決手段】取り付け角を左右独立して変更可能に設けた一対の主翼2と、主翼推進器3と、胴体推進器4を制御することで簡便な機構により水平飛行能力と、垂直離発着能力を両立する。
(もっと読む)
連続降下アプローチによる航空機の予測可能性の最大化
【課題】航空機の連続降下アプローチ法を発展させ、改善すること。
【解決手段】本発明は、到着時間に最大の精度を保証する連続降下アプローチに関する。この連続降下アプローチは空力的飛行経路角を維持することにより実行され、対地速度の精度を向上させる。ここに開示される改善点は、このアプローチを使用しない場合には所望の対地速度からのドリフトを生じ、つまり到着時間にずれを生じるような、連続降下アプローチ中に行われる旋回について説明する。空力的飛行経路角を修正して、旋回完了時の航空機の潜在エネルギーを補償的に変化させることにより、運動エネルギーに予想されるドリフトを相殺する。
(もっと読む)
移動体の三次元群制御方法
【課題】本発明が解決しようとする課題は、三次元移動体の群制御に関するものであって、従来のような厄介な制御ではなく、しかも群が集合状態を維持しながら同一方向へ移動する機能、作業対象の周囲を定点旋回移動する機能を安定して備えた群制御手法を提示することである。
【解決手段】本発明に係る移動体の三次元群制御方法は、対象個体周辺の外側から内側に向かって接近領域,平行領域,そして反発領域の順に球状若しくは楕円球状の三層構造からなる相互作用領域を設定し、周辺個体がどの領域に存在するかに応じて接近ルール、平行ルールそして反発ルールからなる行動モデルをアルゴリズムとして適用するものである。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
11 - 20 / 65
[ Back to top ]